
作者:德州学院 韩林 管儒 盛中华
指导教师:张秀梅 张俊叶
作品简介
二、开发背景
伴随现代实验室的更新换代,仪器越来越贵重,对于实验室的安全问题越来越受到人的重视,这就要求安防产业加速发展。
对于此系统的实现,利用避障遥控小车携带摄像头,完成智能化对现代实验室失火、偷盗,实时检测高端仪器。当突发事故小车能及时报警,保护人员与财产的安全,通过远程控制小车对实验室的火、气、热等分析,安全可靠。为今后的安防产业向标准化、联网化、层次化、数据化、智能化发展奠定基础。
三、结构说明:
设计主要可分为主控模块,动力模块、避障模块、遥控模块、远程摄像模块、热式红外传感器模块、烟雾传感模块、自动防盗模块。主控模块主要由STC公司提供的增强版8051单片机IAP15F2K61S2;动力模块主要由L298N、直流变速电机、两轮驱动的三轮底盘;避障模块主要由超声波模块、红外开关;遥控模块主要由红外遥控模块构成;远程摄像模块主要由无线远程摄像头构成;热式红外传感器模块主要由热式红外传感器、蜂鸣器;烟雾传感模块主要由烟雾传感器、蜂鸣器;自动防盗模块主要由红外开关、蜂鸣器。
四、功能说明:
本系统主要实现的是自动避障、红外遥控、摄影拍摄三大功能,另外还添加了防盗、低压报警、液晶显示、随手而动、转向灯、转向报警、热式红外感应、烟雾报警等功能。
(1)自动避障:利用超声波测距及红外开关使小车的及时避障。
(2)红外遥控:利用红外线传播距离相对较远,利于控制小车。
(3)摄影拍摄:利用t7838wip监控网络摄像机实现对图像的采集,利于远程控制。
(4)防盗:离开地面一定距离时实现鸣响报警。
(5)低压报警:电压过低时实现鸣响报警。
(6)液晶显示:能够清晰显示一些字符、距离及速度。
(7)随手而动:利用超声波测距实现保持与障碍物一定距离。
(8)转向灯:当转向时实现转向灯指示功能。
(9)转向报警:当转向时实现转向报警。
(10)热式红外感应:当人靠近时报警。
(11)烟雾报警:当火灾时检测到烟雾报警。
五、作品特色:
(1)利用无线远程网络摄像头,通过上位机远程控制小车智能巡检。
(2)利用无线远程遥控。
(3)当电压低于3.82V时报警。
(4)自身防盗。
(5)能够保持小车与障碍物之间的距离。
平台选型说明
IAP15F2K61S2单片机是高速、低功耗、超强抗干扰的新一代8051单片机,采用第八代加密技术,机密性超强,指令代码完全兼容传统8051,对于数据的处理,及整个系统的控制具有普通8051无可比拟的特点
1.增强版8051CPU,1T,单时钟、机器周期但速度快8-12倍;
2.61k字节片内Flash程序存储器,擦写次数10万次以上;
3.片内大容量2048字节的SRAM;
4.大容量片内EEPROM,擦写次数10万次以上;
5.内部高可靠复位,8级可选复位门槛电压,可省掉外部复位电路;
6.共6个定时器/计数器,3个16位可重装载定时器/计数器(T0/T1/T2,其中T0/T1兼容普通8051的定时器/计数器),并均可独立实现对外可编程时钟输出(3通道),3路CCP/PWM/PCA还可在实现3个定时器;
设计说明
一、原理图
总体设计电路原理图由于是自己焊接因此是以插针为主既方便了调试硬件,又防止因不小心而焊接失误导致无可挽回的结果。因此电路中模块与单片机以插针相连。设计电路原理图如图4-5。

图1 总体电路原理图
二、设计原理
设计并制作一个可遥控避障小车携带摄像头,完成智能化对整个系统或单个对象进行实时信息采集,为今后的安防产业向标准化、联网化、层次化、数据化、智能化奠定基础。当选择遥控模块时可以实现红外遥控,当选择自动避障时可以实现小车的自动避障同时两种模块都能完成对图像的采集。
因此对于整个系统主要分为图像采集模块、驱动模块、超声波模块、避障模块、液晶显示模块、光电开关控制模块、热式红外报警模块、烟雾报警模块。
2.1图像采集模块
主要是利用t7838wip无线远程网络摄像机,其配置了130万像素的高清芯片,支持内存卡自动循环录像,不挑宽带,所有网络都可以用,支持手机大屏远程观看,还有远程监听,无线wifi,红外夜视等超强功能,监控需要的理想选择。
主要是依靠小车进行图像的采集,利用小车的移动性使摄像头平常到达不到的死角使摄像头可全范围采集图像,再利用软件实现图像的展现
2.2驱动模块
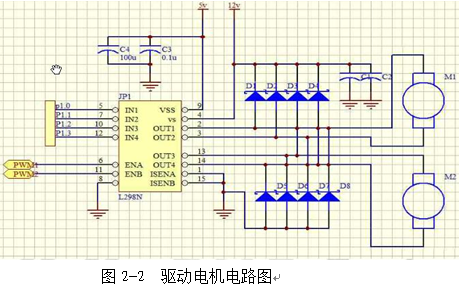
使用全桥驱动芯片L298N芯片驱动电机。
L298N采用由达林顿管组成的H型PWM电路。PWM电路由四个大功率晶体管组成H桥电路构成,四个晶体管分为两组,交替导通和截止,用单片机控制达林顿管使之工作在开关状态,根据调整输入控脉冲的占空比,精确调整电动机转速。
这种电路由于管子工作只在饱合和截止状态下,效率非常高。H型电路使实现转速和方向的控制的简单化,且电子开关的速度很快,稳定性也极强,是一种广泛采用的PWN调整技术。
L298N是双H桥高电压大电流集成电路。可见L298N的内部结构,每个H桥的下侧桥臂晶体管发射极连在一起,其输出脚(SENSEA和SENSEB)用来连接电流检测电阻。Vss接逻辑控制的电源。Vs为电机驱动电源。
IN1-IN4输入引脚为标准TTL 逻辑电平信号,用来控制H桥的开与关即实现电机的正反转,ENA、ENB引脚则为使能控制端,用来输入PWM信号实现电机调速。可以直接通过电源来调节输出电压,可以直接用单片机的I/O口提供信号,而且带有使能端,方便PWM调速,电路简单,性能稳定,使用方便,具体电路图如图2-2 驱动电机电路图。
2.3超声波模块
在超声波上电前,首先去掉模式选择上的跳线帽,使模块处于电平触发模块模式。其时序图如图2-3 US-100测距时序图
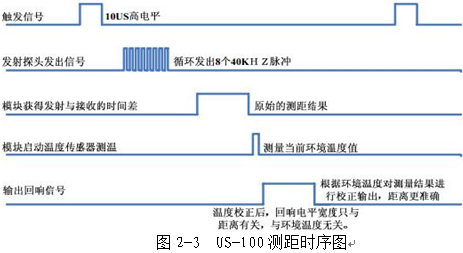
只需要在Trig/TX管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校 正,将校正后的结果通过Echo/RX管脚输出。
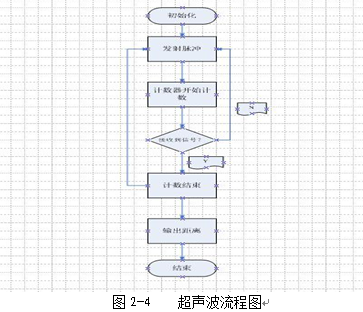
在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过Echo端输出一高电平,可根据此高电平的持续时间来计算距离值。即距离值为:(高电平时间*340m/s)/2。 因为距离值已经经过温度校正,此时无需再根据环境温度对超声波声速进行校正,即不管温度多少,声速选择340m/s即可。具体流程图如图2-4。
2.4遥控模块
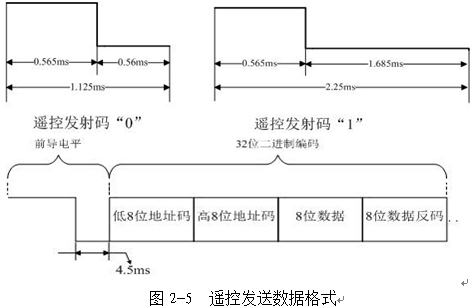
由于红外遥控具有无线,非接触控制,体积小,功耗低,功能强,成本低。对于此遥控模块数据编码用NEC格式,使用38khz载波频率引导码间隔是9ms+4.5ms,使用16位客户代码,使用8位数据和8位取反的数码代码,其中利用高电平0.565ms、低电平0.56ms遥控发射码为”0”高电平0.565ms、低电平1.685ms遥控发射码为”1”.
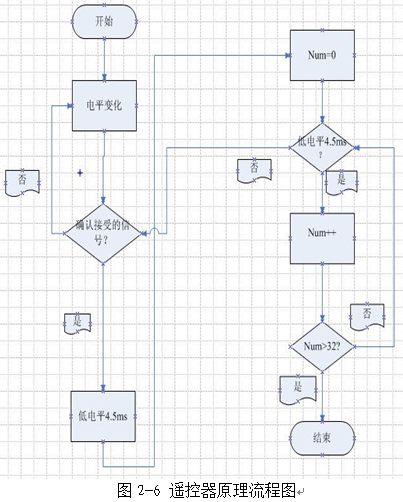
当遥控器无按键按下,红外发射端不发射信号,当按不同键,接收端接收不同信号具体以接收端为准,当接收端接收到信号时先进入外部中断程序,关闭外部中断;对引导吗进行判断。如果引导码正确,准备接受下面的遥控数据,以查询方式判断遥控的数据是0还是1.如果非引导码,则退出外部中断。
先后依次接收地址码、地址反码、数据码、数据反码。当接收到32位数据时,说明一帧数据接收完毕。比较数据码和数据反码,若数据码取反与数据反码不同,则表示为无效数据,释放数据,当相同时将数据传送给cpu,开启外部中断,准备下次遥控接收。具体流程图如图2-6。
为了降低电源功耗,遥控器脉宽调制的编码经过38khz的载波经二次调制解码时代码格式应以接受代码为准(接受代码与发射代码反向) 主框图如图2-7。

2.5液晶显示模块
作为显示设备主要是显示字符、前方障碍的距离和小车的速度。其中主要用液晶1602.第一脚:VDD接5V;第2脚:VSS接地;第3脚:V0为液晶显示器对比度调整端,接正电源时对比度最弱,接地时对比度最高,对比度过高时会产生"鬼影",使用时可以通过一个10K的电位器调整对比度;第4脚:RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器;第5脚:RW为读写信号线,高电平时进行读操作,低电平时进行写操作。
当RS和RW共同为低电平时可以写入指令或者显示地址,当RS为低电平RW为高电平时可以读忙信号,当RS为高电平RW为低电平时可以写入数据;第6脚:E端为使能端,当E端由高电平跳变成低电平时,液晶模块执行命令;第7~14脚:D0~D7为8位双向数据线。
2.6热式红外报警模块
热式红外感应电路板外形尺寸32mm*24mm感应角度 <100度锥角工作温度-15-+70度感应透镜尺寸直径:23mm
光敏控制(可选择,出厂时未设)可设置光敏控制,白天或光线强时不感应。
温度补偿(可选择,出厂时未设):在夏天当环境温度升高至30~32℃,探测距离稍变短,温度补偿可作一定的性能补偿。4、两种触发方式:(可跳线选择)
不可重复触发方式:即感应输出高电平后,延时时间段一结束,输出将自动从高电平变成低电平;
可重复触发方式:即感应输出高电平后,在延时时间段内,如果有人体在其感应范围活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到 人体的每一次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。5、具有感应封锁时间(默认设 置:2.5S封锁时间感应模块通电后有一分钟左右的初始化时间,在此期间模块会间隔地输出 0-3 次,一分钟后进入待机状态,当人进入其感应范围则输出高电平,进而蜂鸣器鸣笛报警,人离开感应范围则自动延时关闭高电平输出低电平。
感应模块采用双元探头,探头的窗口为长方形,双元(A 元 B 元)位于较长方向的两端,当 人体从左到右或从右到左走过时,红外光谱到达双元的时间、距离有差值,差值越大,感应越灵敏 。
当人体从正面走向探头或从上到下或从下到上方向走过时,双元检测不到红外光谱距离的变化, 无差值,因此感应不灵敏或不工作;所以安装感应器时应使探头双元的方向与人体活动最多的方 向尽量相平行,保证人体经过时先后被探头双元所感应。
为了增加感应角度范围,本模块采用圆 形透镜,也使得探头四面都感应,但左右两侧仍然比上下两个方向感应范围大、灵敏度强。
2.7 MQ-2烟雾传感器模块
1、具有信号输出指示。
2、双路信号输出(模拟量输出及TTL电平输出)
3、TTL输出有效信号为低电平。(当输出低电平时信号灯亮,可直接接单片机)
4、模拟量输出0~5V电压,浓度越高电压越高,当浓度高于设定值,蜂鸣器报警。
5、对液化气,天然气,城市煤气有较好的灵敏度。
6、具有长期的使用寿命和可靠的稳定性
7、快速的响应恢复特性
2.8光电开关模块
光电开关是光电接近开关的简称,它是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体有无的。物体不限于金属,所有能反射光线的物体均可被检测。光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。
在此系统光电开关主要有三种功能,第一种是做为避障开关使用,第二种是作为报警开关使用,第三种是用作码盘计数使用,进而进行测速和转向定角。光电开关有效特点具有检测不透明物体准确、可靠,抗恶劣条件好(灰尘、散射光导)反射系统检测距离中等,最大15m,易于安装。
本小车系统利用遥控携带摄像头,自主避障完成智能化对现代实验室安保、远程管理大棚、对科研重地安检,当突发事故小车能及时报警,利于人员疏散,与财产的保护,通过远程控制小车对实验室的火、气、热等分析为今后的安防产业向标准化、联网化、层次化、数据化、智能化做基础,为今后更好的开发和利用巡检功能奠定基础。
此文档的相关视频来自:http://v.eepw.com.cn/video/play/id/13436
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

