
作者:丽水学院 莫云杰 覃全兴 李坤浩
指导老师:余莉 陈超
作品简介:
(说明:含图片、开发背景、结构说明、功能与使用说明、作品特色等,字数不超过800字)
开发背景:社会快速发展的今天汽车对于每个人来说都已经是必不可少的交通工具,然而汽车行驶安全也成为人们最为关注的一个话题之一。我们小组专门针对汽车倒车安全问题设计了一款比较实用的倒车雷达。一般常规的汽车倒车雷达都只是测试汽车尾部到障碍物的距离,而对于汽车倒车转弯时与左右两边距离障碍物的距离却不能显示。我们的作品就是专门针对这一问题,设计了双向的车载测距雷达,通过两个雷达同时对汽车左右两边进行障碍物测距,并且有较高的精确度,这样就避免了汽车在转弯倒车时容易对左右两边障碍物疏忽的情况,更好保证了汽车的安全性。
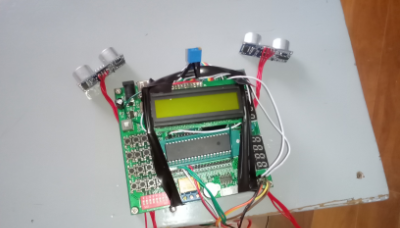
结构说明:我们的作品主要分为雷达部分、液晶显示部分和51单片机部分。雷达是用于对汽车与障碍物之间距离的测量。液晶显示屏用于把单片机处理得到的汽车相对两侧障碍物的距离显示是出来。单片机作为信息处理中心控制雷达的发送与接收电波,并处理数据发送到显示屏上。
功能与使用说明:我们的作品最直接的功能就是测量汽车距离障碍物之间的距离。首先通过单片机指令使雷达发送声波信号并接收声波的返回信号传回给单片机,单片机对雷达从发送到接收信号的过程进行计时,并根据声音早空气中传播的传播的速度计算出雷达距离障碍物之间的距离,最后通过程序把得出来的数据在1602液晶显示屏上显示出来。在用户使用我们的倒车雷达时不需要任何技术操作,雷达上电后会自动开始工作并把数据通过显示屏显示给用户看到。
作品特色:我们的作品最大的特点是轻便,操作简单,显示简洁明了。我们的作品部件较少,小巧轻便,对于小型汽车来说也不不会显得笨重。倒车雷达基本不需要人工操作,上电后直接开始工作,并显示数据,方便快捷。
平台选型说明:
STC竞赛专用开发板
CPU芯片:STC15F2K61S2
设计说明:
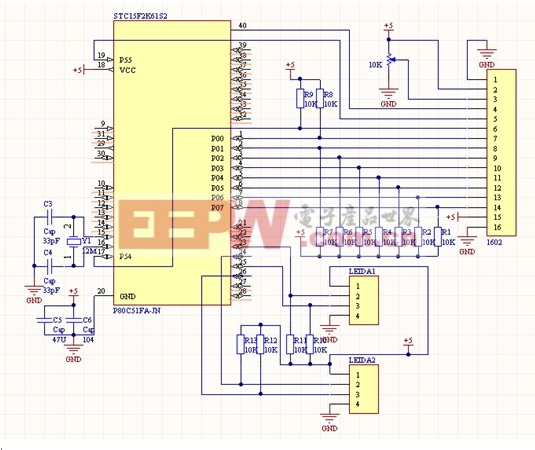
设计原理图
设计原理:
我们的作品汽车双向倒车雷达主要由两个雷达,一块STC15F2K61S2单片机和一块液晶显示器组成。
两个汽车雷达分别测量汽车左右两边与障碍物之间的距离,他们分别通过上拉电阻R10、R11和R12、R13连接单片机23、24、25、26四根引脚,其中雷达的2号引脚是发射信号引脚,通过单片机给2号引脚一个短暂的高电平是的雷达发出一个短暂的超声波,当超声波遇到障碍物反射回雷达时,雷达的三号引脚收到信号回馈给单片机一个高电平信号。雷达的1号引脚和4号引脚分别作为雷达的电源端和接地端。
液晶我们用的是1602液晶显示屏。液晶的第一行用作显示汽车右边雷达检测到的汽车与障碍物的距离,第二行用作显示汽车左边雷达检测到的汽车与障碍物的距离。通过程序指令控制单片机使得液晶第一行从头显示“Right:”接着显示一个“XXX.X”的数字表示距离,再是显示“cm”表示厘米单位。第二行和第一行类似,从头显示“Left:”。液晶的1号和16号引脚是接地端,2号和15号引脚接电源为液晶供电,三号引脚接电位器,通过调整电位器控制液晶显示的辉度。剩下4号到14号引脚通过10K的上拉电阻再连接到单片机相应的I/O口,单片机就是通过这几根线控制液晶显示数据的。
单片机部分我们用的是比赛规定的STC15F2K61S2型号单片机。18号引脚接电源,20号接地。15号16号引脚给单片机接一个12M的晶振给单片机提供脉冲信号。
这些事硬件部分的设计。
程序的设计我们大概的思路是通过单片机对雷达从发送超声波开始计时到雷达接收到超声回波为止,通过单片机处理,根据声音在空气中的传播速度来计算出雷达距离检测到的障碍物的距离是多少,并向液晶发送相应信号让液晶能够显示以厘米为单位的距离。
首先,设程序定计数器和外部中断模式。程序给单片机23号24号五毫秒的高电平,让雷达在这五毫秒内向前发送一个超声波,同时程序打开单片机计时器开始计时,程序进入一百毫秒的等待。当超声波遇到障碍物时它会反射回来给雷达一个信号,在接收到信号的同时,单片机的25号26号引脚我产生一个高电平,这两个引脚也是单片机的外部中断引脚,当他们产生高电平时,单片机相应外部中断被触发同时停止计时器的计时。接着程序把计数器的高八位和低八位数值取出,根据12M晶振计数器每加一位数字的时间计算出从雷达发出超声波到接收到超声波所用的时间再除以2就表示超声波从发射到接触障碍物所花的时间。然后根据声音在空气中传播的速度大约是340m/s,程序会自动计算出汽车与障碍物之间的距离。再一次测距完成后程序就再一次打开总中断,在雷达发射超声波的同时计时器开始计时。雷达快速不断地进行着这项工作就可以不断的快速跟新汽车与障碍物之间的距离。这个的过程会在同一时间汽车左右两个雷达上同时反复进行,这样两个雷达就能同时兼顾到汽车左右两个方向障碍物的情况。
然后是液晶显示单片机对雷达信号处理后的数据进行显示的过程。首先设定液晶屏在第一行从头显示“Right:”,第12格13格分别显示“c”“m”字样,表示第一行显示的数据是右侧雷达测量到的汽车右边距离障碍物的距离,且单位是厘米,中间第7、8、9、11格分别是数据的百位十位个位和小数点后面第一位,第10格显示小数点。与第一行类似。第二行开头第二格开始显示“Left:”字样表示第二行显示左边测距雷达测量到汽车左边相对障碍物之间的距离。后面的数据及单位显示方式与第一行相同。
设计方案:
我们作品的设计思路是通过雷达,显示屏与单片机的配合用嘴简介方便快速的方式去显示汽车与障碍物之间的距离,这样的产品的特点首先就是虽然他是一款利用单片机开发电子产品,但对于每一位驾驶员而言,不管对电子产品懂得多少都可以很轻松的学会如何使用它,只要给它上电它就会自动开始工作,完全不需要人工的其他操作,基本实现了全自动化,不需要让司机在开车的同时再分心去操作雷达。其次是我们虽然用的是最简单的液晶去显示数据,但简单的液晶就可以使得数据的显示直观明了,让人一目了然,让司机在倒车的时候通过液晶的数据很直观的了解到自己的汽车正处在什么样的一个环境中,周围是否有什么障碍物正在接近。最后就是我们的倒车雷达构造简单,体积较小,作为车载电子产品特别对于小型家用轿车来说也不会因为在车内多放了这个设备而显得拥挤,但同时这么简单小巧的一款倒车雷达装置他的与一般的倒车雷达功能相当。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

