
购 买:

一、组装(组装的细节其他网友均有介绍,因此不再做详细说明)。

attention!!!
注意:
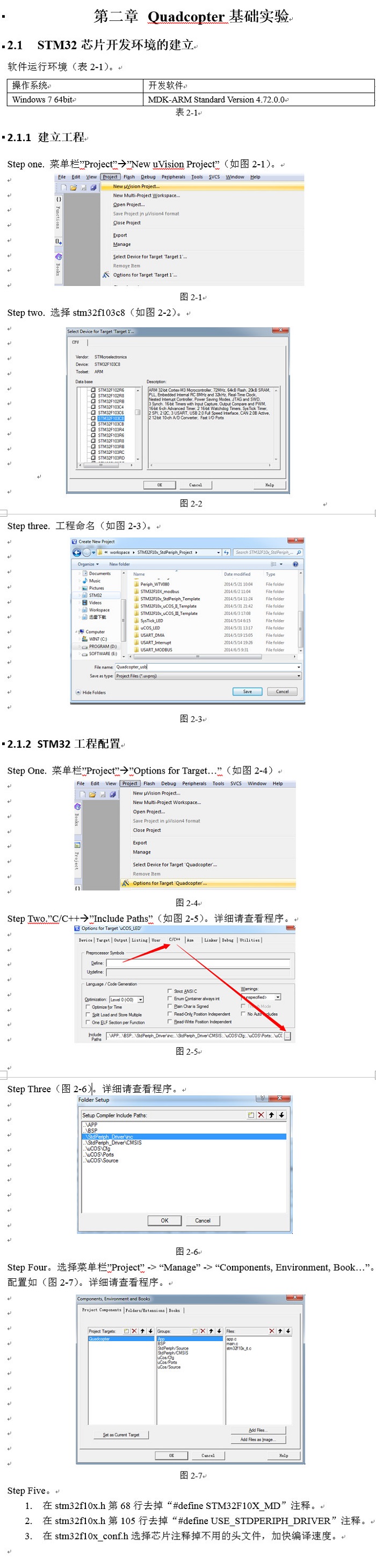
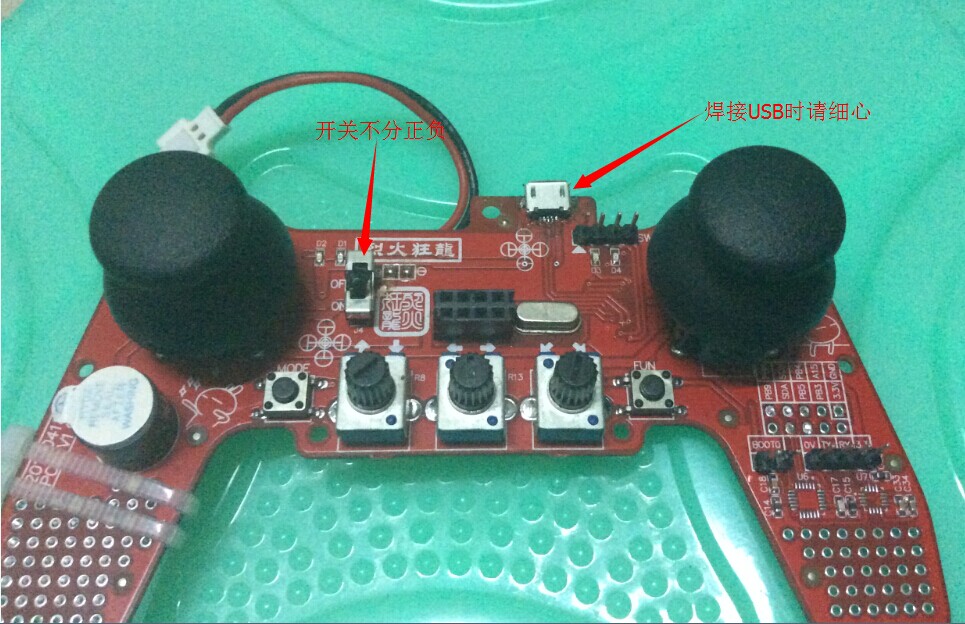
1、usb焊接时,先一个焊盘上上焊锡,固定。然后焊接其余管脚,焊锡丝尽量少。
2、usb焊接错误时,每个管脚加焊锡丝(切记焊锡别弄到usb里面去了),烙铁加热,拆掉后,去除掉多余的焊锡丝,重复(注意1)。
注意:
3、MCU出货时已经烧录程序。焊接完毕通电,若焊接正确LED灯D3闪烁。若无此现象请检查供电是否正常以及MCU是否运行。
4、连接MicroUSB口,若在充电LED灯D1长亮,充满LED灯D2长亮。若无此现象请检查MicroUSB焊接以及电池正负极是否正确。

注意:
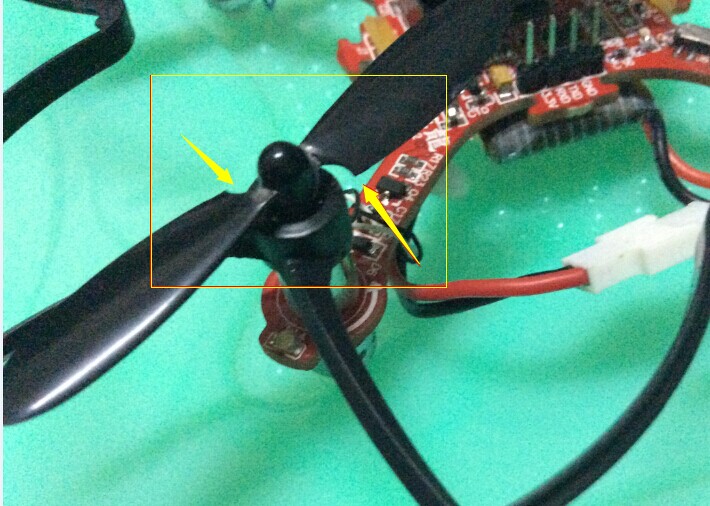
4、飞行器的桨叶和电机的方向,此外电机的电源线不宜过长。

注意:
5、电机电源接反的后果(刚开始自己不知道,以为发货的时候发错了,因此向烈火免费要了一组桨叶,在此谢谢!深感抱歉)。
注意:
5、组装完成后,若遥控器无法控制飞行器则检查无线收发模块是否漏焊、虚焊。重新焊接后依然没有解决,用示波器查看
无线模块IRQ的波形。

注意:
6、飞行时,飞行器白色箭头所指为正方向。飞行时因高于地面20cm,以免气流对QuadCopter的影响。新手不建议飞太高(>10m)。
回复
| 有奖活动 | |
|---|---|
| 【有奖活动】分享技术经验,兑换京东卡 | |
| 话不多说,快进群! | |
| 请大声喊出:我要开发板! | |
| 【有奖活动】EEPW网站征稿正在进行时,欢迎踊跃投稿啦 | |
| 奖!发布技术笔记,技术评测贴换取您心仪的礼品 | |
| 打赏了!打赏了!打赏了! | |
| 打赏帖 | |
|---|---|
| Buck电路工作在CCM模式下电感电流的计算公式是什么?被打赏5分 | |
| buck电路工作原理被打赏5分 | |
| 基于MSPM0L1306的MODBUS-RTU协议通讯实验被打赏50分 | |
| 每周了解几个硬件知识+485硬件知识分享被打赏10分 | |
| 【换取手持示波器】树莓派PICOW网页烟花被打赏18分 | |
| 【换取手持示波器】树莓派PICO逻辑分析仪被打赏16分 | |
| 【分享评测,赢取加热台】教你五分钟本地部署蒸馏版本的DeepSeekR1-7B被打赏12分 | |
| 【换取手持示波器】蓝牙音箱更换电池被打赏8分 | |
| 【换取手持示波器】鼠标更换微动开关被打赏10分 | |
| 【我要开发板】4.传感器移植被打赏50分 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂