
前言:小白一只,刚用51做完智能小车,想借此机会学习下STM32,顺便研究一下飞控算法,增长下知识量
听说要有目录...以后再写
准备焊接
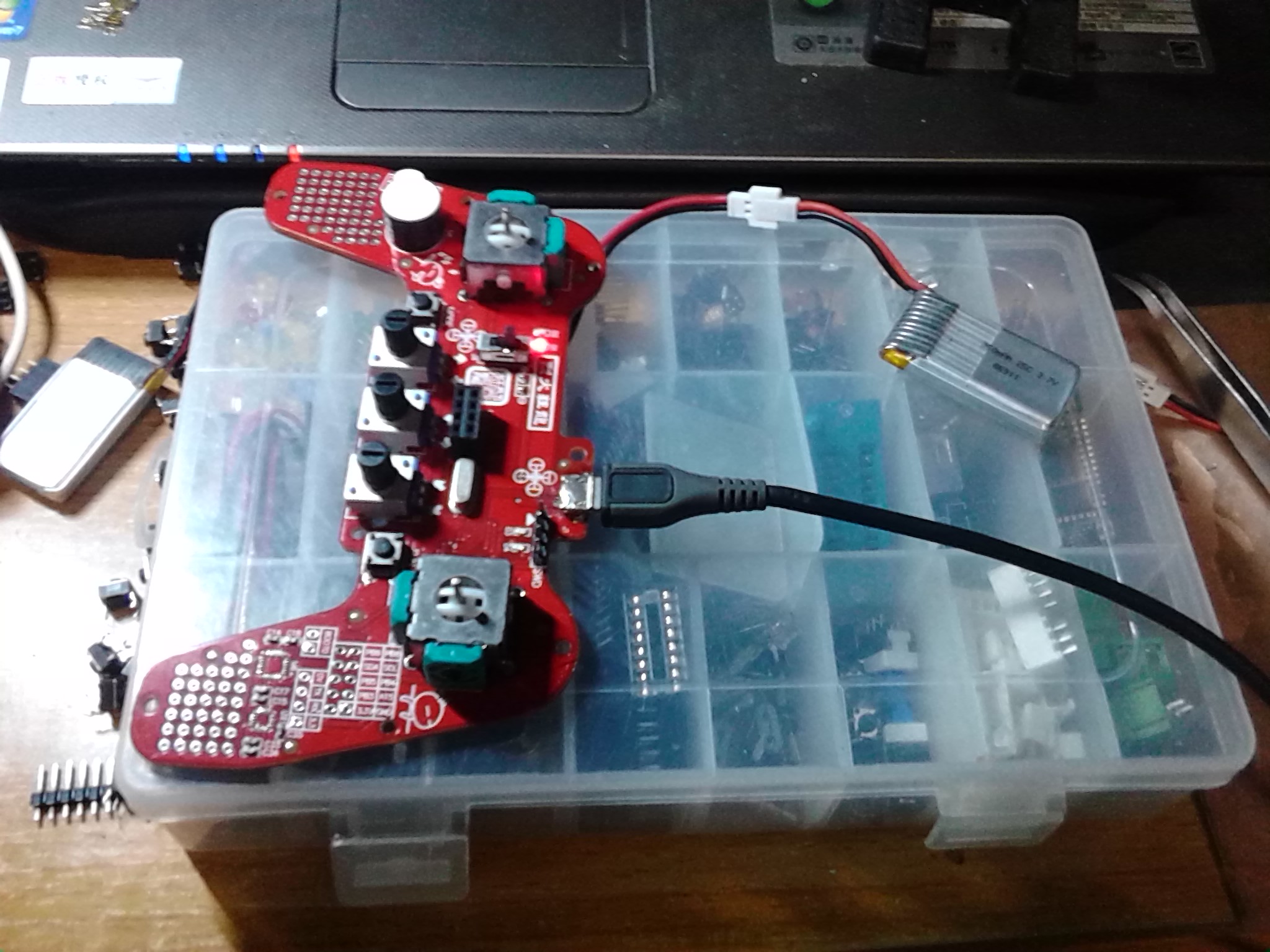
观察了一下遥控器与四轴的板子,决定先把遥控器弄好,遥控器...先焊usb插口,好像很难的样子,按着chenyong1983的教程焊接
http://forum.eepw.com.cn/forum/thread/threadid/250939 祝我好运...

USB...折腾了三个钟头,终于........

焊了我三个钟头,累死我了...毕业晚会都没去看...其中遇到的问题,第一次塑料突起没有弄平,结果焊上之后D+和D-断路。作为一个强迫症患者,表示不能忍...最后经过修整之后勉强连上了,这个时候我去固定USB,结果你妹呀,没有固定好又掉线下来了...
好吧,我接着焊,经过我最后俩钟头的鼓捣,焊盘已经被我弄的能看到铜了,终于算是把正负极给连好了...为了防止意外短路,我没有把D+与D-焊上,不得不说是个遗憾,第一次我已经弄好了...浑身难受啊
这个usb焊接的时候大家一定要注意,下面两个小塑料突起一定要弄平,不弄平的话下面不好焊接,可能会断路。还有五个焊盘不要上太多锡,以免糊到一起,五个焊盘短路。最后也是最重要的,usb两边一定要多上锡固定...对了,焊接的时候注意助焊剂的使用,听大大们说用助焊剂会好焊很多
接下来就是四轴的组装了,焊接的话开关需要注意一下,经过昨天USB的折腾,开关有点经验了...切掉下面多出来的固定位,总共七个焊盘。左右两边是固定的,主要的就三个,我焊接的顺序是先对好位置,把三个里面的一个焊接好,位置一定好对准。接下来就是两边的四个焊点了,如果怕里边的两个离得太近,弄不好的话可以只焊外侧的两个。但是开开关的时候就要轻轻的了,我就使劲大给弄掉了...固定好之后把最后的两个焊点焊接完成,这样小开关就可以了。
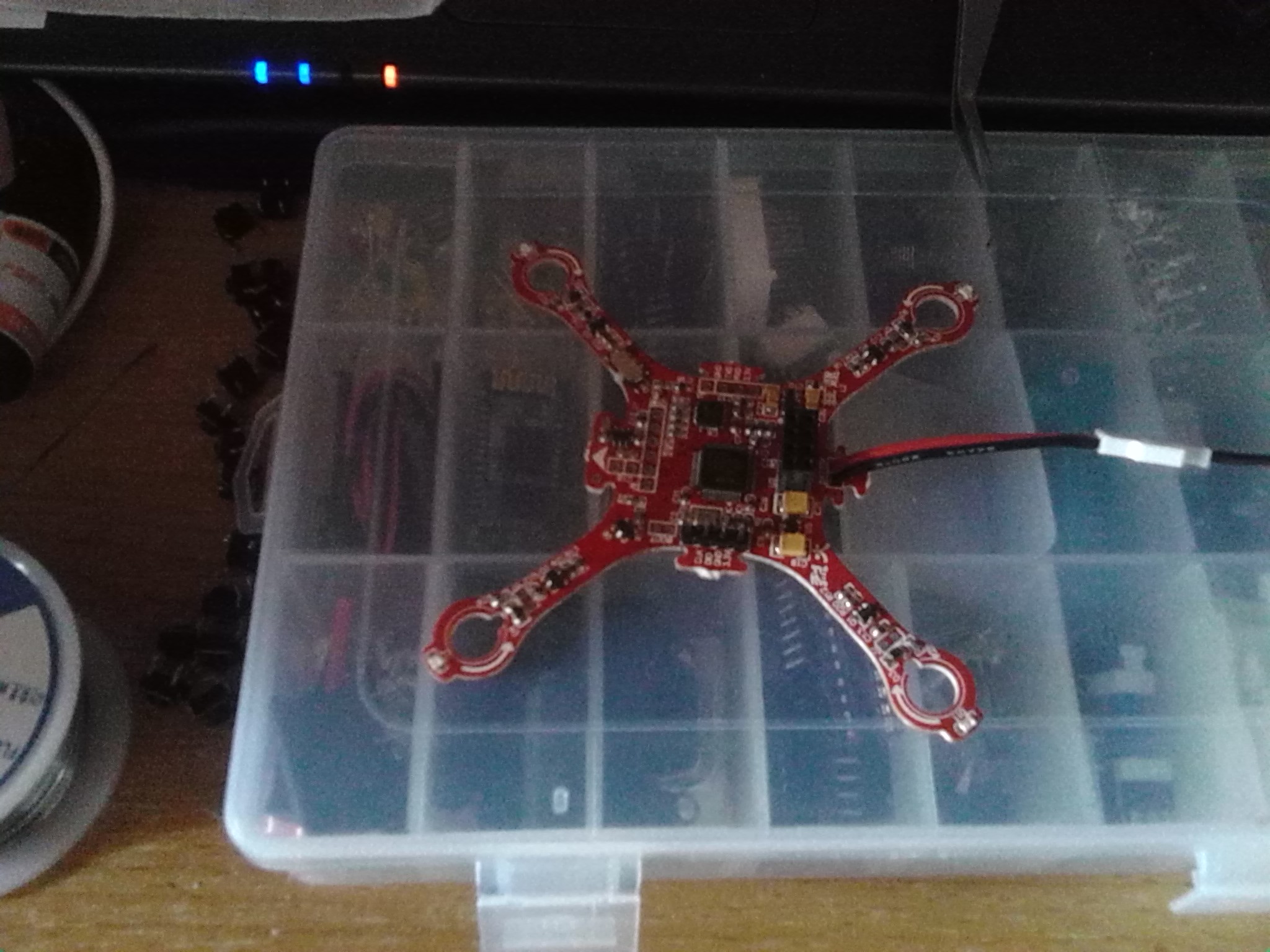
把无线插口焊上,电池焊上,下载接口焊上,没有需要焊的了...最后就是这样。
用昨天充满电的电池开机试试,LED灯很漂亮!

LED先是慢速闪烁几下,最后再快速闪烁,这个过程是调平的过程,一定要放在水平面上,不然起飞的时候会偏。
LED灯非常漂亮!!
然后就是点击的组装了,我是按照论坛大神的组装方式来装的,最后组装好的效果


至于组装过程,凭印象说一下:
1,组装电机,电机帽与垫子。垫子放电机帽的最下边,可以从下面用镊子一类的东西捅过去,垫子有一个横沟是让电机导线放在里面的。电机帽同样有一边是让导线通过的。把电机线在电机底端弄直,从垫子的横沟通过,再通过电机帽可以出线那一端把导线捋直通过。这样电机就组装好了。
2,四个电机放好位置,黑白线是逆时针转的,白正黑负,红蓝线是顺时针转的,红正蓝负。
3,从下往上把电机捅到四轴PCB板的相应电机位,电机帽紧贴PCB板底部。可以使用502等进行固定,502一定不要用太多,烈火大大说会损坏电机,还有下面的塑料垫,也要用502固定一下,不然炸鸡会炸飞,炸飞三个的表示一定要固定一下...
4,固定好之后把电机导线剪短到适宜长度。然后按白正黑负,红正蓝负,把导线焊接到PCB板上。
5,把保护壳套到电机上,保护壳可能被快递折磨弯了,可以用厚书压直。
6,也是最容易出错的,四个螺旋桨的安装。两对白桨,两对黑桨。白桨与黑桨分别也是成对的,一对正反桨。按照你自己的习惯,可以定义白桨为前进方向,也可以定义黑桨为前进方向。PCB板上标有箭头的是自带固件定义的前进方向,前进为X模式。接下来,根据电机转动方向,确认螺旋桨安装位置。前进的方向是一对相同颜色的正反桨,另一个方向也是相同颜色的。根据电机转向确定螺旋桨转动时是否会向下吹风。这个想一下就能判断出来了吧。第一次我就是弄错了,结果一边吹正风,一边吹反风。
记着螺旋桨相同颜色的是一对正反桨,颜色不同只是为了方便区分前进方向。
螺旋桨安装完成之后我们的小四轴就完成了!
与遥控器的合照!

组装完成之后,就可以试飞了!
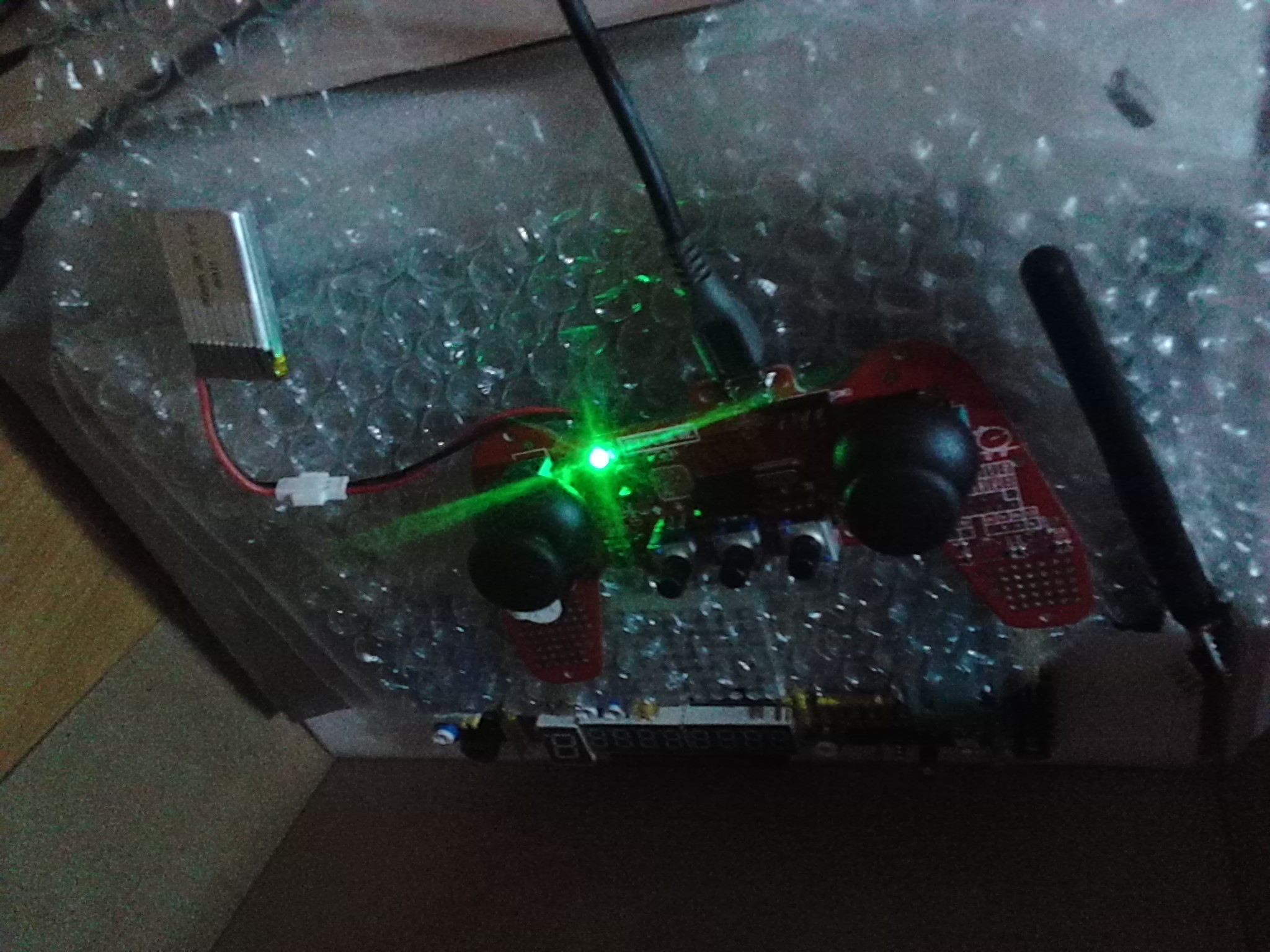
先打开遥控器,右边的绿灯红灯同时亮起,然后红灯不亮,绿灯闪烁。这是无线未连接的提示。
关掉遥控器,打开四轴,全部灯同时亮起,慢速闪烁几下,之后快速闪烁几下。这个过程是四轴的调平过程,一定要放在水平面,不然起飞后会偏。最后四轴的绿灯一直闪烁,这是无线未连接的提示。
遥控器与四轴工作都正常。检查遥控器的三个微调按钮是否在中间,调至中间位置。打开四轴的开关,待调平完成之后,打开遥控器,不出意外的话蜂鸣器响三声,四轴与遥控器的绿色LED常亮,这是连接成功的提示。
这个时候四轴的螺旋桨并没有动,把油门拉到最下边,再网上推,螺旋桨就开始转动了。
遥控器三个微调按钮左边是一个锁尾按钮,锁尾就是锁定四轴的尾部朝向,这个时候四轴不会发生自旋。右边则是机身LED灯开关,晚上用。
试飞建议打开锁尾按钮,锁尾打开时右边红色LED发光。
锁尾打开后油门慢慢向上推,四轴有可能会偏,可能是由于四个电机不在一个平面上,这个时候检查四个电机是否和PCB固定好,或者重新调平,一定要放在水平面。
如果实在调不好,可以使用三个微调按钮调整,微调按钮很好用。
调整好之后可以慢慢试飞,飞行速度较快,一定要掌握好,不要猛的打方向打死。好了,可以爽飞了!
| 有奖活动 | |
|---|---|
| 硬核工程师专属补给计划——填盲盒 | |
| “我踩过的那些坑”主题活动——第002期 | |
| 【EEPW电子工程师创研计划】技术变现通道已开启~ | |
| 发原创文章 【每月瓜分千元赏金 凭实力攒钱买好礼~】 | |
| 【EEPW在线】E起听工程师的声音! | |
| 高校联络员开始招募啦!有惊喜!! | |
| 【工程师专属福利】每天30秒,积分轻松拿!EEPW宠粉打卡计划启动! | |
| 送您一块开发板,2025年“我要开发板活动”又开始了! | |



 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

