
我的两轮自平衡小车DIY进程开始了。。。
一楼作为进程更新的超链接
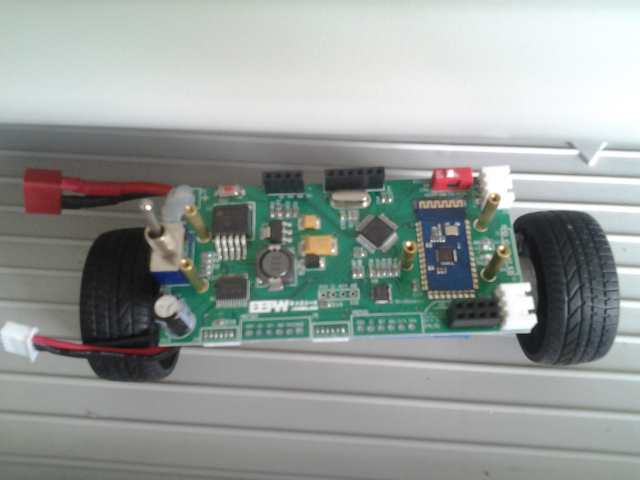
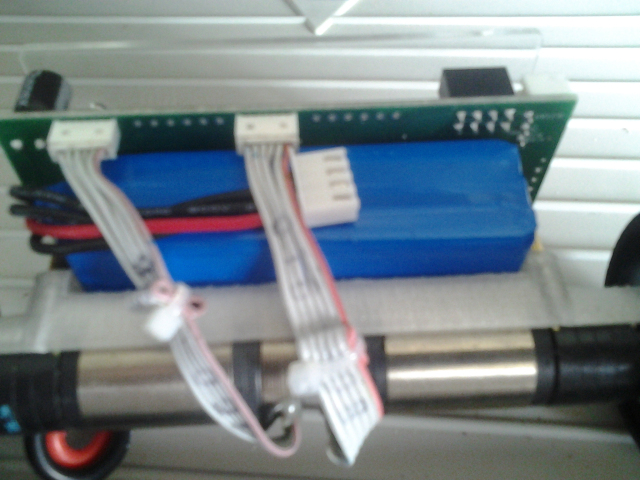
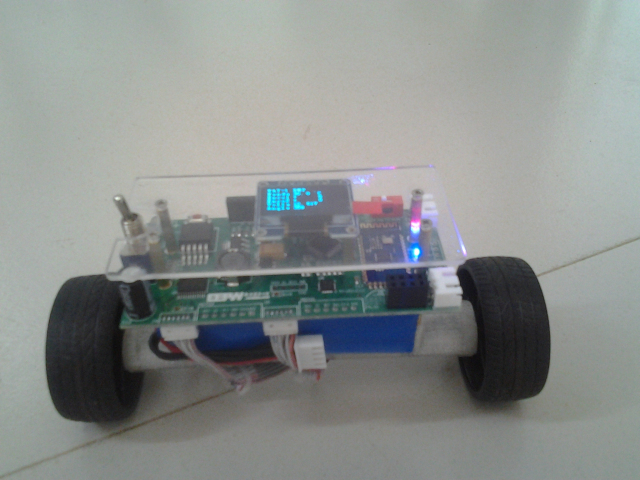
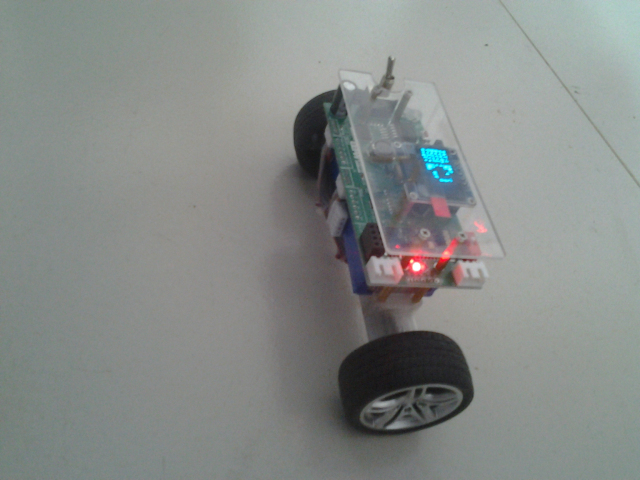
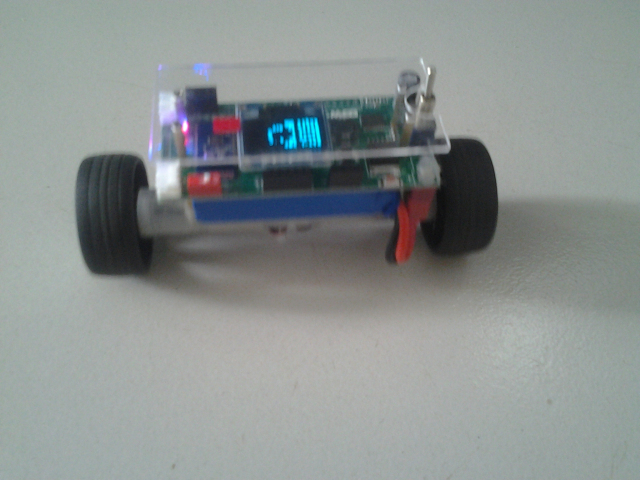
1、两轮自平衡小车的组装及测试·······································2楼
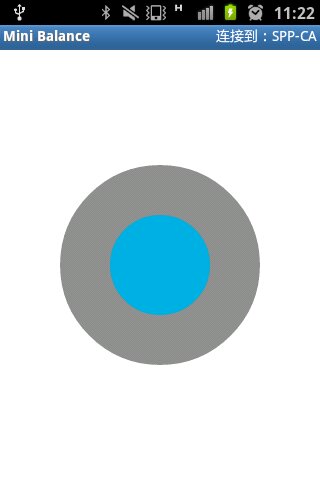
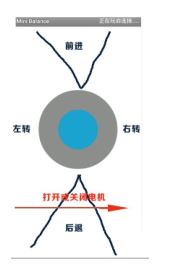
2、手机蓝牙连接平衡小车测试视频·····································5楼
3、平衡小车超声波避障················································6楼
平衡小车套件实验
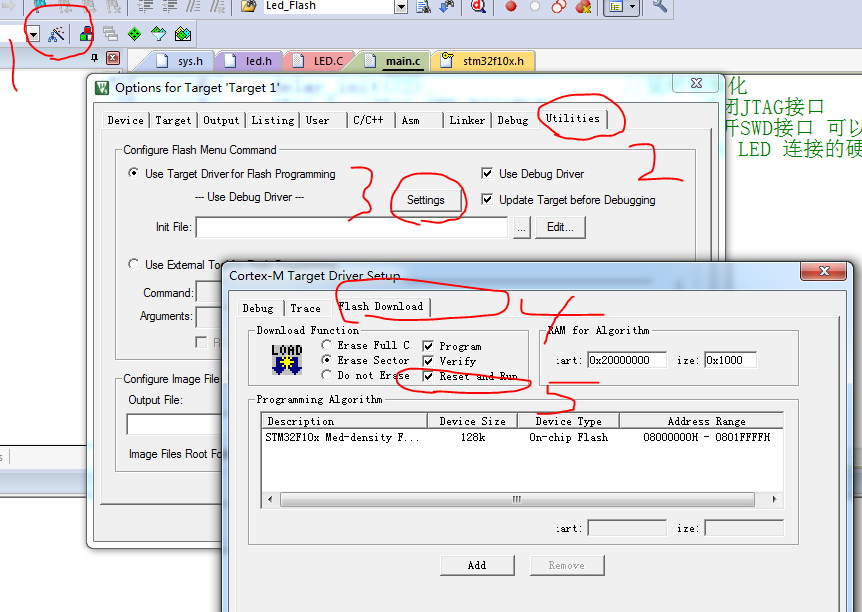
实验1.LED闪烁·························································7楼
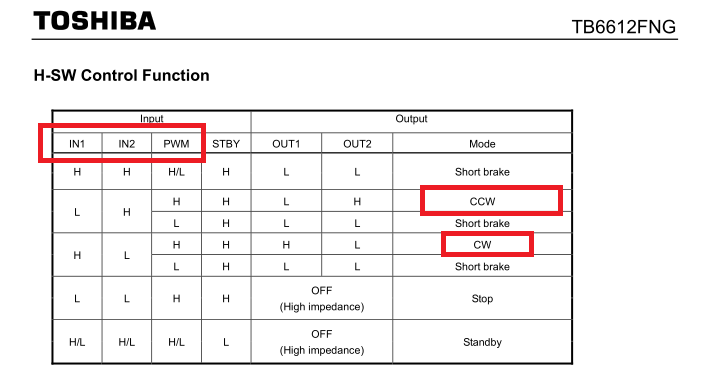
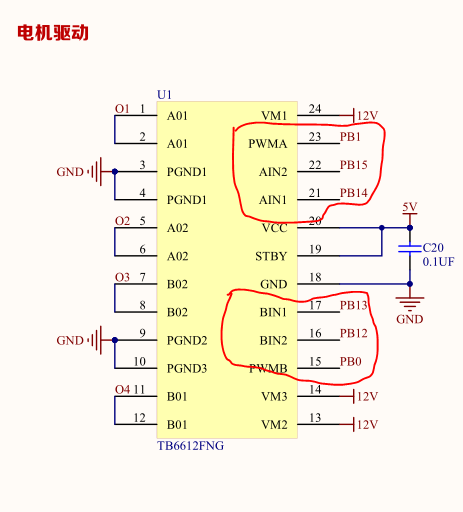
实验2.电机驱动实验····················································8楼
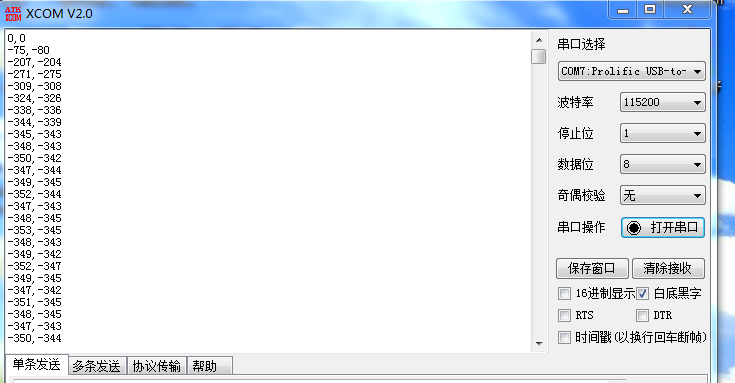
实验3.编码器数据采集实验·············································9楼
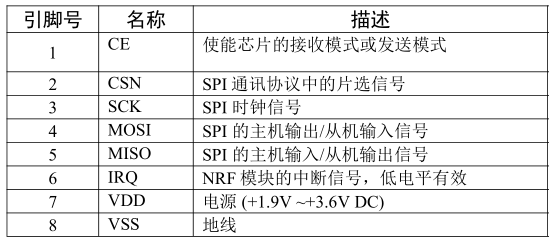
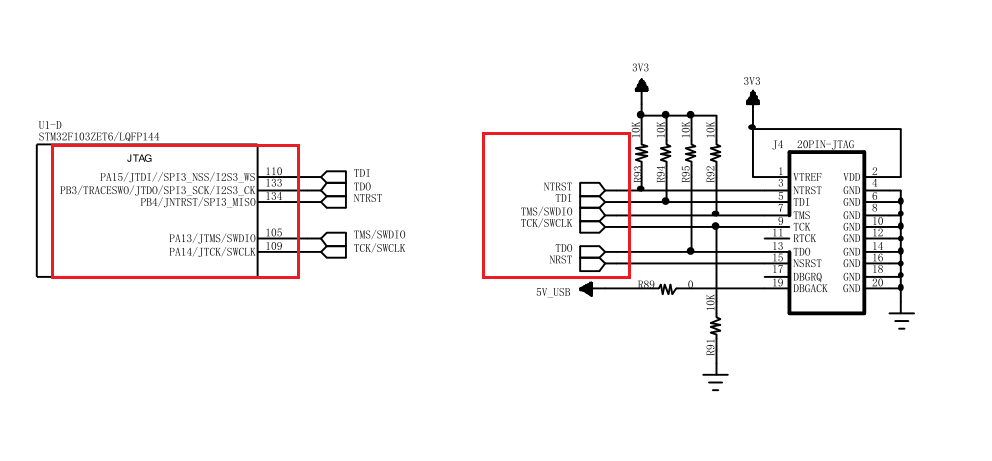
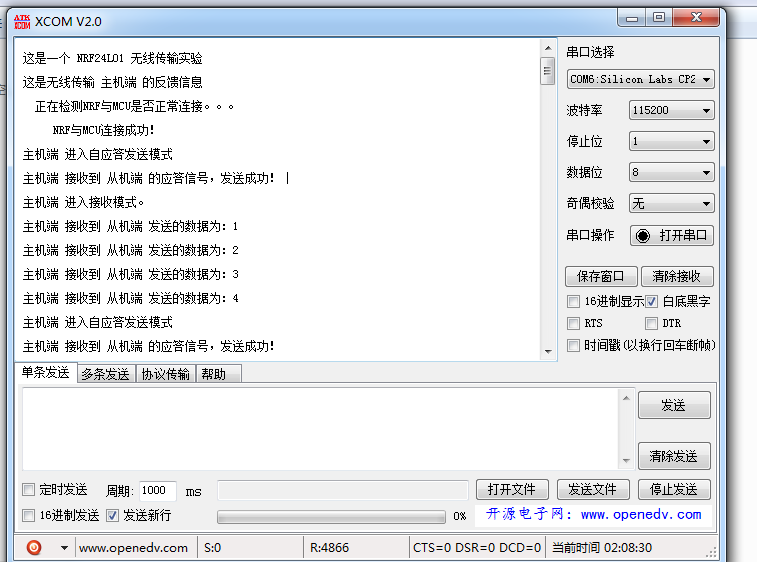
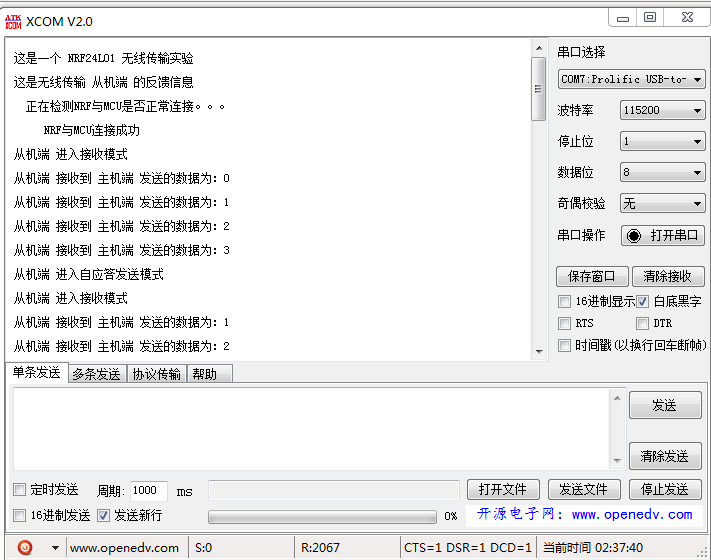
实验4.无线通讯实验(NRF24L01)··································10楼
实验5.传感器驱动实验(读取mpu6050原始数据)···················11楼
实验6.多传感器数据融合实验·········································12楼
实验7.PID调试实验···················································13楼
实验8. 实现平衡小车直立时处于静止状态·····························15楼
实验9.实现平衡小车绕圈圈············································16楼
实验10.实现平衡小车绕八字行走······································18楼
实验11.实现小车自主避障·············································20楼
实验12.平衡小车跟踪移动物体·········································22楼
实验13.实现体感控制平衡小车·········································24楼
实验14.平衡小车在桌面静止···········································26楼
模块化平衡小车硬件篇······································27楼
模块化平衡小车相关硬件说明及资料·························30楼
模块化平衡小车直立调试····································32楼
模块化平衡小车桌面直立····································35楼
模块化平衡小车直立抗干扰··································36楼
手机蓝牙控制模块化平衡小车································37楼
自制模块化平衡小车第二版之硬件篇···························38楼
自制模块化平衡小车第二版之桌面直立·························39楼
自制模块化平衡小车第二版之直立抗干扰·······················40楼
自制模块化平衡小车第二版之手机蓝牙控制平衡小车············41楼















 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂