
转载请注明原贴来源
MicroPython开发板都是带有文件系统的,与tpyboard v102不同,V202上没有USB接口(只有USB转TTL串口),所以只能通过串口或者Wifi方式访问。
一、介绍几个简单的命令
显示文件列表
通过串口访问文件的方法,跟tpyboard一样,都是通过os列出当前目录下的文件和目录:
>>> import os
>>> os.listdir()
['boot.py', 'demos', 'drive', 'main.py']
查看当前目录
>>> os.getcwd()
改变当前目录
>>> os.chdir()
创建目录:
>>> os.mkdir("demos")
os.mkdir("demos")命令就是创建一个demos的目录,档执行os.listdir()时会显示['boot.py', 'main.py', 'demos']说明已经在开发板中建立了一个demos的目录。
删除指定文件
>>>os.remove()
删除指定目录
>>>os.rmdir()
二、利用串口进行查看文件列表和修改文件
1.首先打开工具,进入调试串口页面
进入到主页面后,选择好TPYBoard v202的串口,这里的串口位COM3,点击open(),注意波特率一定要调成115200,
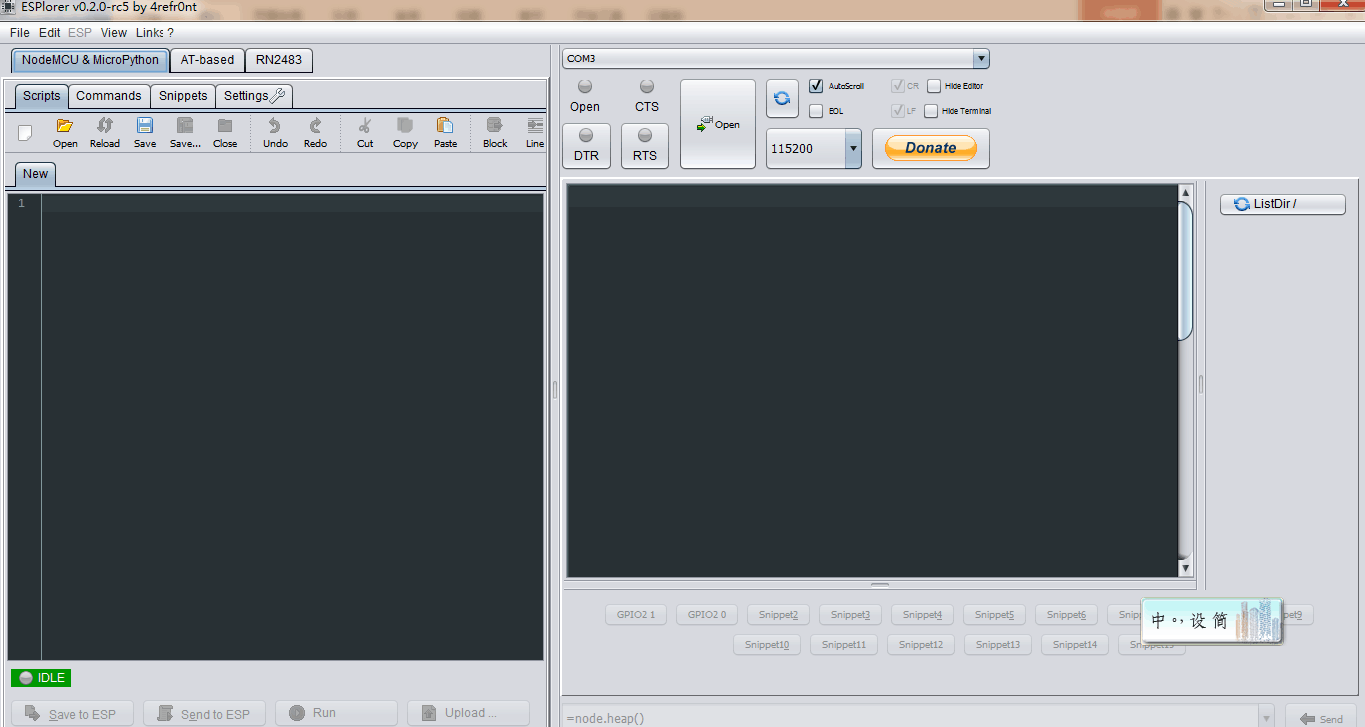
点击open出现下面界面
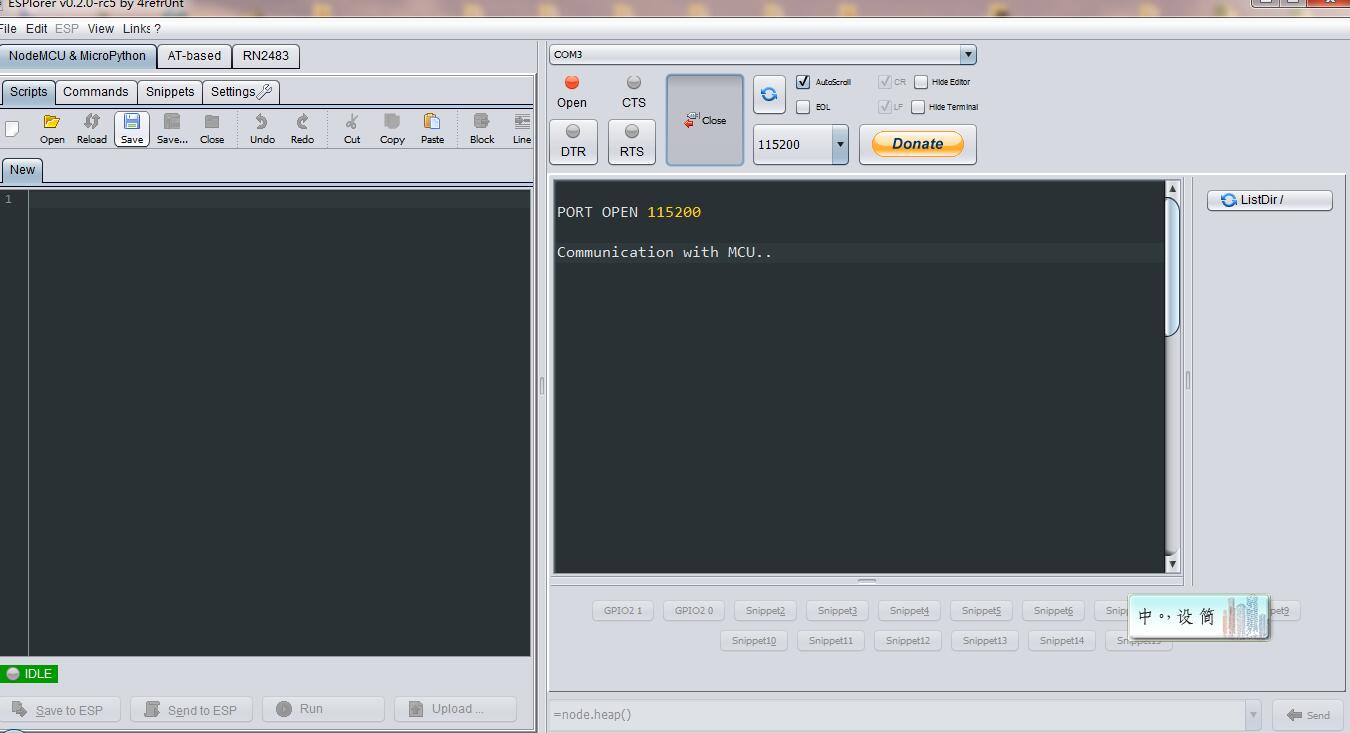
这个时候我们按下TPYboard v202的RST按键,就会出现下面界面
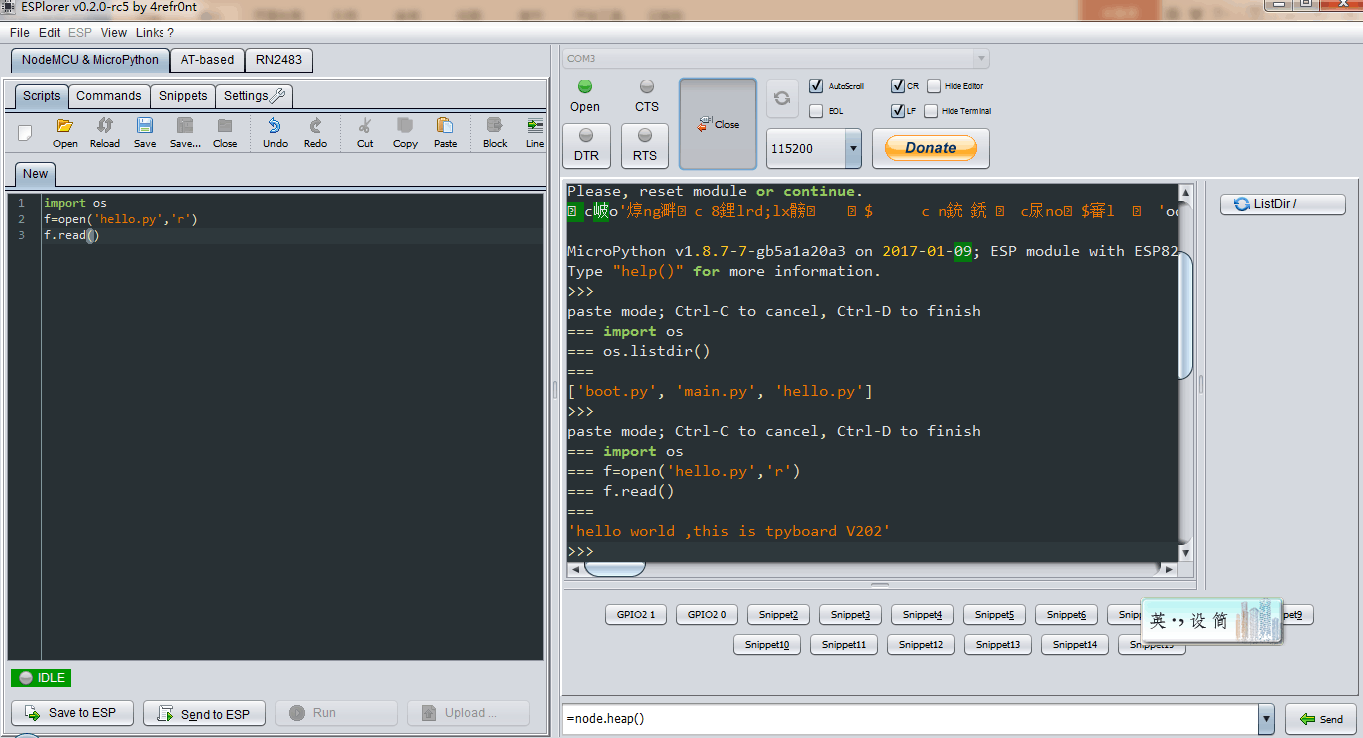
2. 查看文件内容
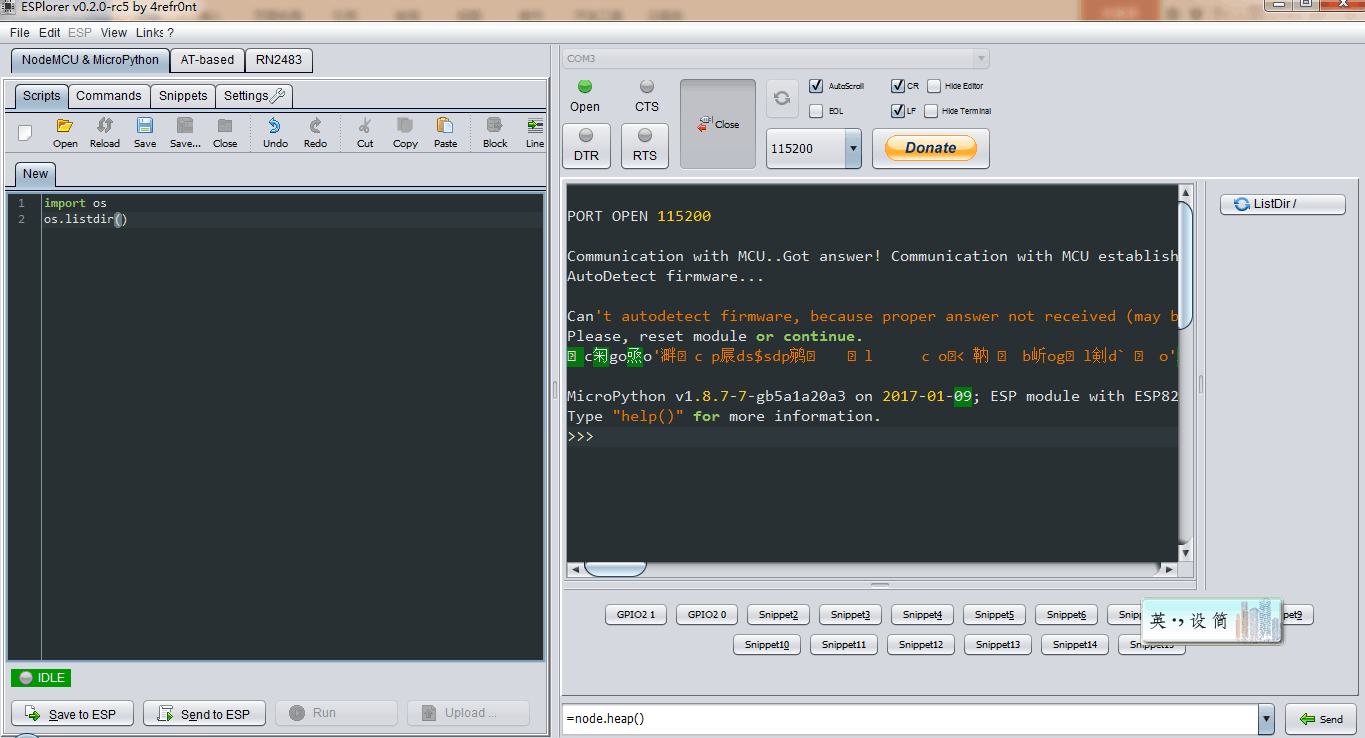
只需要这两行代码即可,我们点击Send to ESP按钮,即可将这两行代码发送给我们的TPYBoard v202开发板,下面是效果图
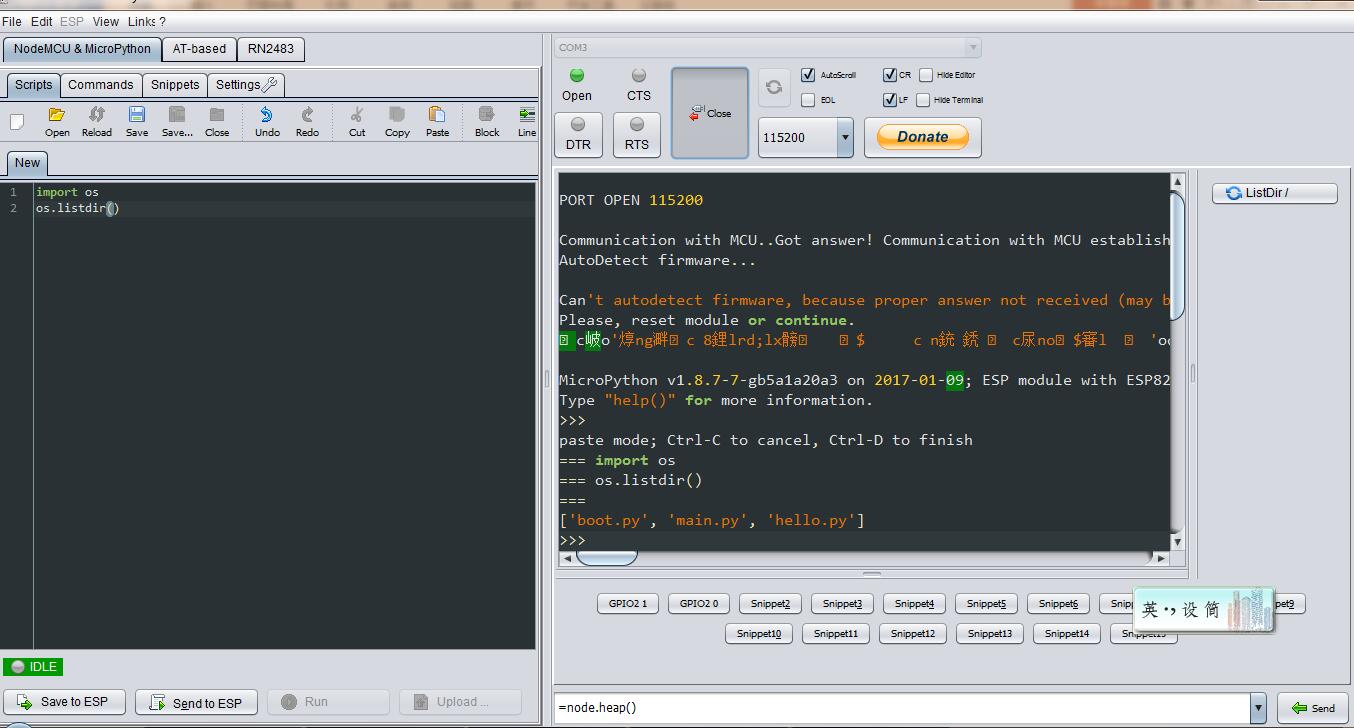
我们就可以看到这里面有三个文件,分别是boot.py,main.py,hello.py文件。
下面我们查看hello.py文件的内容
这是直接打开文件的内容,下面我们通过串口工具查看,写完下面代码点解Send to ESP按钮将代码传给TPYBoard v202
3.修改文件内容
我们将hello.py中的内容修改为hello TurnipSmart,this is tpyboard V202
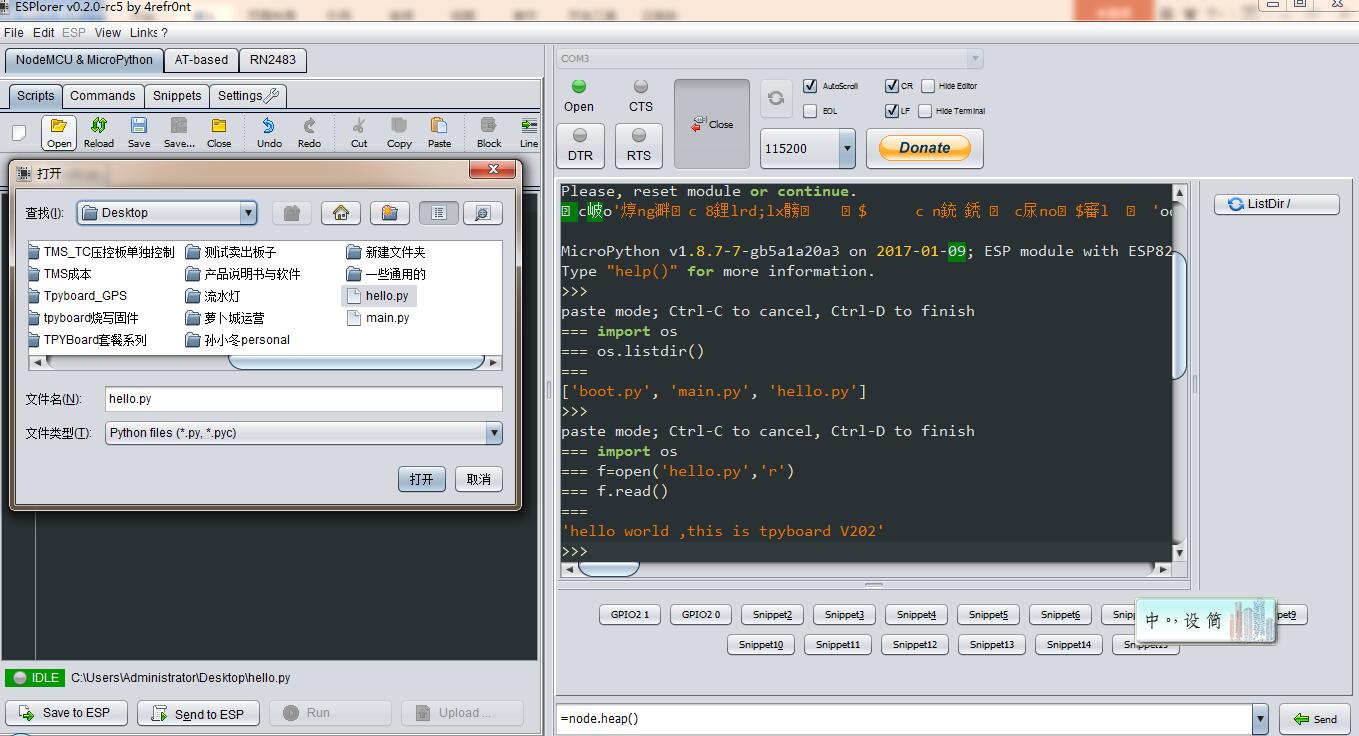
点击open按钮,选中hello.py,选中打开后出现下面的界面
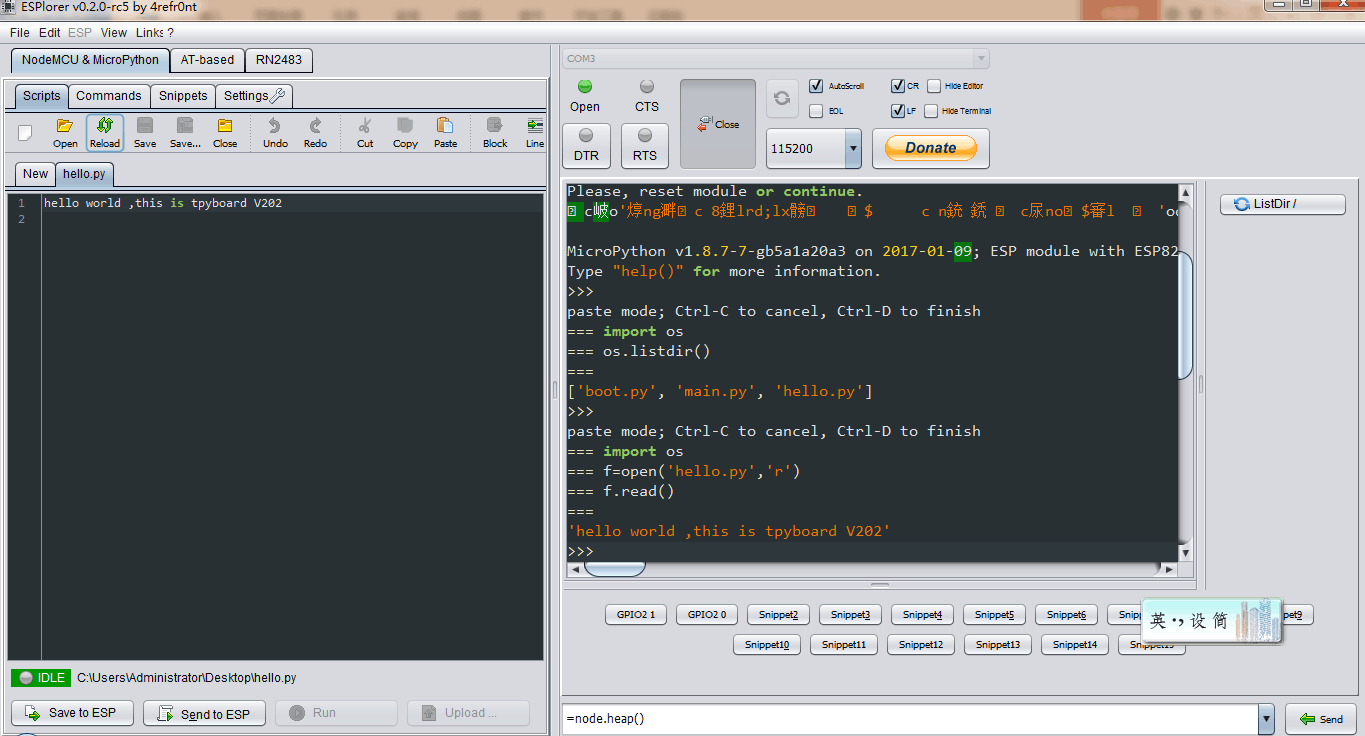
我们修改hello.py中内容,点击Save to ESP按钮,就修改成功了
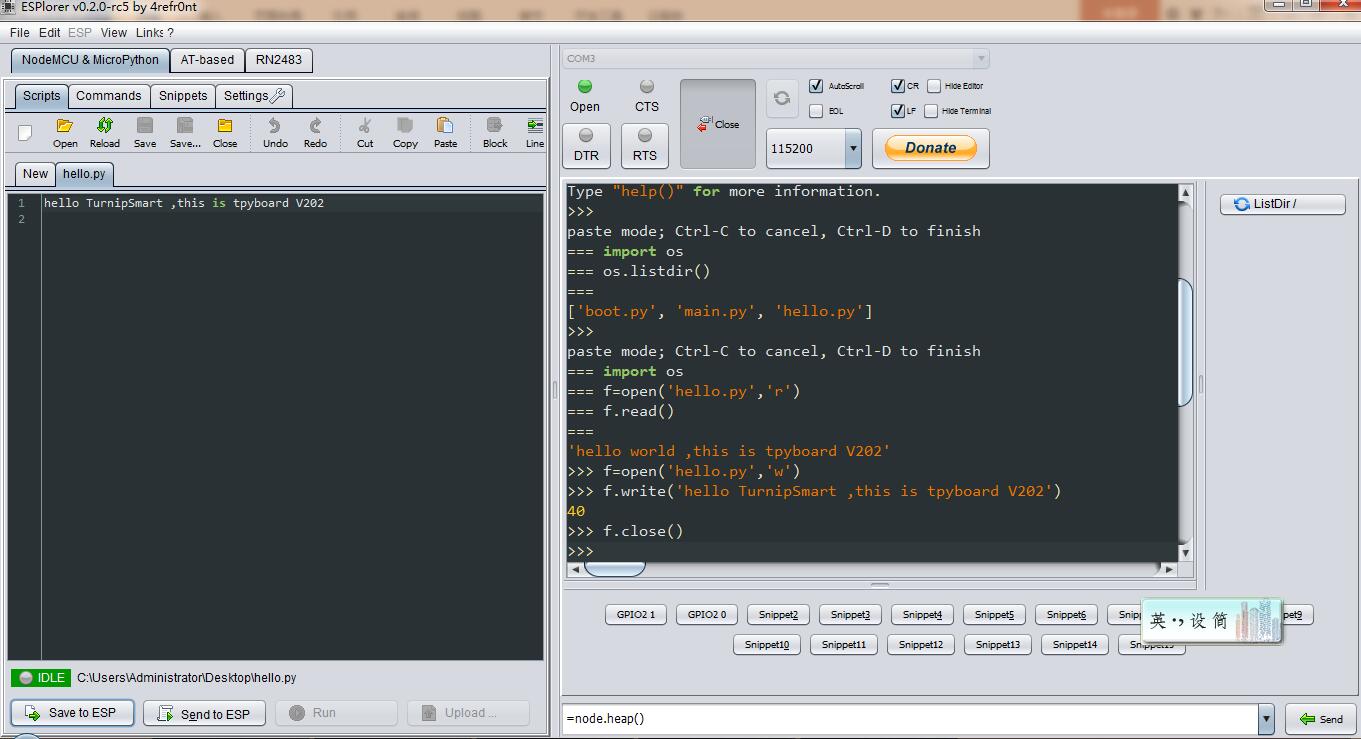
写入成功后,我们读取hello.py,看看里面是什么内容
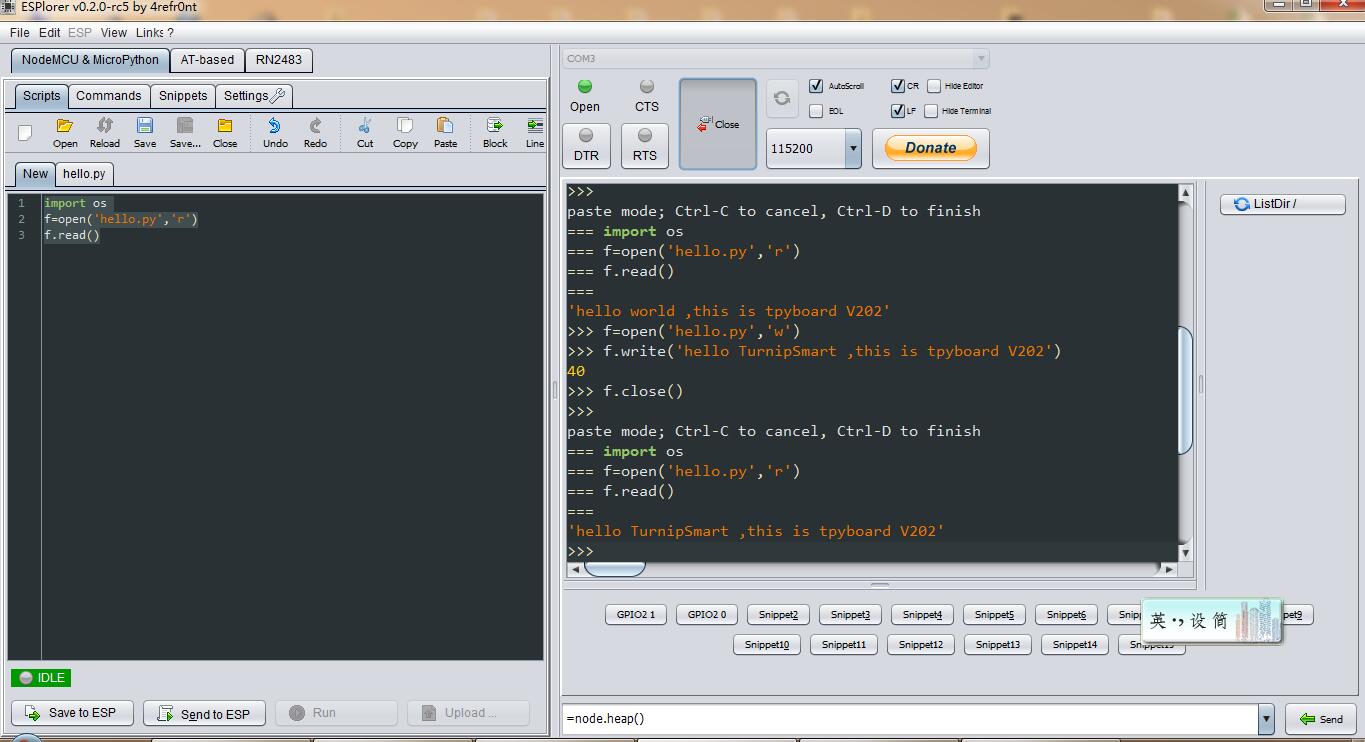
里面内容变为hello TurnipSmart,this is tpyboard V202,下面我们看一下原文件的内容
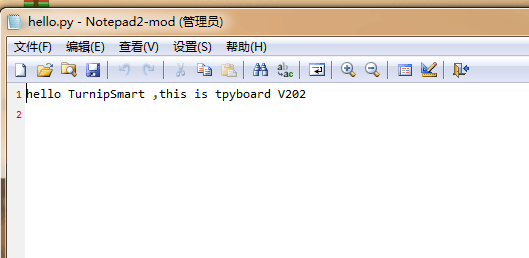
同样内容变为hello TurnipSmart,this is tpyboard V202文件修改成功。
三、TPYBoard V202网络配置
下面我们将TPYBoard V202连接本地网络

页面会返回True,我们即配置成功
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

