
移植环境:1 iTOP-4412 精英版 + MT6620 Bletooth 模块2 kernel 3.0.15 version3 Android4.4.4 Ubuntu12.04 64BIt 开发环境
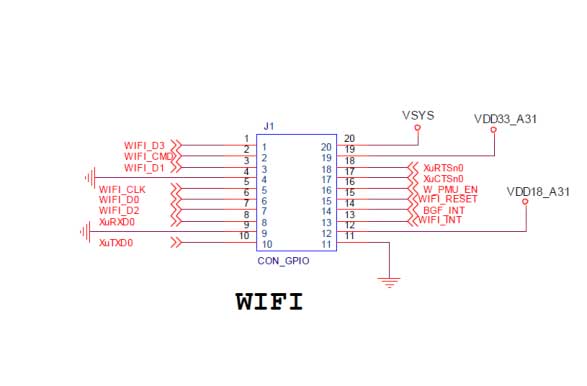
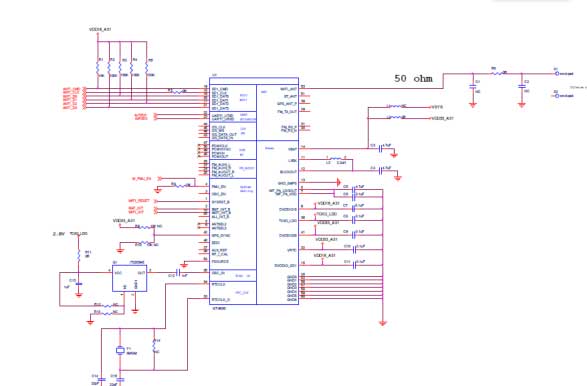
1.2 硬件相关部分由于 MT6620 芯片集成了 Bluetooth,WiFi, FM,GPS 功能,所以 Bluetooth 的原理图可查看MT6620 WiFi 原理图部分,下图为 Bletooth 模块与开发板连接的引脚定义,通过该接口可以知道 Bluetooth 模块与 CPU 的交互接口.
 MT6620 的 引 脚 定 义 如 下 :
MT6620 的 引 脚 定 义 如 下 :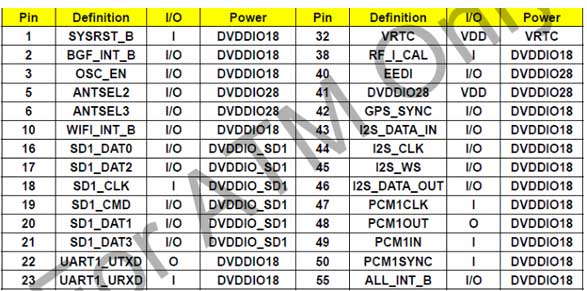 以上是进行 Porting 前的准备工作,当然需要万用表,示波器工具进行辅助的检测,查看Bluetooth 模块的工作电压是否正常,GPIO 的当前状态,串口的数据波形.另外需要强调的是,MT6620 Bluetootch 支持蓝牙 4.0 规范,蓝牙 4.0 规范包括常规蓝牙,高速蓝牙,还有很重要的低功耗蓝牙,即 BLE 的支持,下面是 MT6620 蓝牙特性:▆ 支 持 Bluetooth V2.1 +EDR▆ 支 持 Bluetooth 3.0+HS compliance▆ 支 持 Bluetooth V4.0 Low Energy (LE)▆ 使用 UART / PCM 接口▆ 模組包含 PA with 13 dBm (class 1) transmit power▆ Better WiFi/BT coexistence performance▆ Low power scan function to reduce the power consumption in scan modes关于 MT6620 的更多硬件特性,请参考 MTK 官方发布的 MT6620 硬件使用指导相关文档.1.3 Kernel1.3.1 概述iTOP4412 开发板采用的内核是 Linux 3.0.15 版本,MTK 官方给的移植 Porting 没有说明针对具体的 kernel 版本,由于是 Android4.4,所以 kernel 应该是 3.0 以后的版本或者更高支持;首先按照 PoringGuid 的指导说明,把 New 和 Modify 文件夹下面关于 kernel 部分的修改放到我们的 kernel 代码里面, 把 MT6620 的驱动放在 driver/misc/目录下面,文件夹名称mediatek,里面存放的是 WMT,既 wireless manage tools, 里面提供了与 MT6620 downloadfirmware patch ,enable /disable MT6620 芯片,power on, power off 操作的相关驱动部分, 及SDIO 总线设备接口驱动 Host Interface drivers. 蓝牙驱动 mtk_stp_bt.ko 的源码也在这个目录下面,我们以驱动库 .ko 的形式编译驱动模块.driver/misc/mediatek/ 库文件列表如下::mtk_hif_sdio.ko ----mmc 总线相关接口,mmc 总线发现 SDIO 设备,分配总线地址后,会与该驱动进行适配.适配成功后该驱动会调用 WiFi 网络驱动,另外 Bluetooth 也使用了该驱动库文件提供的相应接口;mtk_stp_uart.ko-----串口相关驱动,通过串口下载固件补丁,设置芯片参数;mtk_stp_wmt.ko-----core 部分,提供 Bluetooth 上电,断电,PSM 省电管理操作等mtk_stp_bt.ko ----字符设备驱动,创建 Bluetooth 设备节点用于与用户空间交互;另外这里附一张 Blutooth Kernel 层驱动层次图:
以上是进行 Porting 前的准备工作,当然需要万用表,示波器工具进行辅助的检测,查看Bluetooth 模块的工作电压是否正常,GPIO 的当前状态,串口的数据波形.另外需要强调的是,MT6620 Bluetootch 支持蓝牙 4.0 规范,蓝牙 4.0 规范包括常规蓝牙,高速蓝牙,还有很重要的低功耗蓝牙,即 BLE 的支持,下面是 MT6620 蓝牙特性:▆ 支 持 Bluetooth V2.1 +EDR▆ 支 持 Bluetooth 3.0+HS compliance▆ 支 持 Bluetooth V4.0 Low Energy (LE)▆ 使用 UART / PCM 接口▆ 模組包含 PA with 13 dBm (class 1) transmit power▆ Better WiFi/BT coexistence performance▆ Low power scan function to reduce the power consumption in scan modes关于 MT6620 的更多硬件特性,请参考 MTK 官方发布的 MT6620 硬件使用指导相关文档.1.3 Kernel1.3.1 概述iTOP4412 开发板采用的内核是 Linux 3.0.15 版本,MTK 官方给的移植 Porting 没有说明针对具体的 kernel 版本,由于是 Android4.4,所以 kernel 应该是 3.0 以后的版本或者更高支持;首先按照 PoringGuid 的指导说明,把 New 和 Modify 文件夹下面关于 kernel 部分的修改放到我们的 kernel 代码里面, 把 MT6620 的驱动放在 driver/misc/目录下面,文件夹名称mediatek,里面存放的是 WMT,既 wireless manage tools, 里面提供了与 MT6620 downloadfirmware patch ,enable /disable MT6620 芯片,power on, power off 操作的相关驱动部分, 及SDIO 总线设备接口驱动 Host Interface drivers. 蓝牙驱动 mtk_stp_bt.ko 的源码也在这个目录下面,我们以驱动库 .ko 的形式编译驱动模块.driver/misc/mediatek/ 库文件列表如下::mtk_hif_sdio.ko ----mmc 总线相关接口,mmc 总线发现 SDIO 设备,分配总线地址后,会与该驱动进行适配.适配成功后该驱动会调用 WiFi 网络驱动,另外 Bluetooth 也使用了该驱动库文件提供的相应接口;mtk_stp_uart.ko-----串口相关驱动,通过串口下载固件补丁,设置芯片参数;mtk_stp_wmt.ko-----core 部分,提供 Bluetooth 上电,断电,PSM 省电管理操作等mtk_stp_bt.ko ----字符设备驱动,创建 Bluetooth 设备节点用于与用户空间交互;另外这里附一张 Blutooth Kernel 层驱动层次图: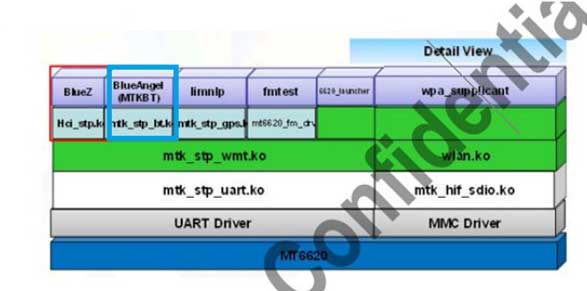 上图红色部分 BlueZ, Hci_stp.ko 为 Android4.0 Bluetooth 使用的蓝牙协议栈与 Kernel 库文件。蓝色部分 Bluedroid, mtk_stp.bt.ko 为 Android4.4 版本使用的蓝牙协议栈与 kernel 库文件。Android4.0 与 Android4.4 关于 Bluetooth 部分变化比较大,请大家移植过程中注意这一点,他们之间的具体差异这里不再讲解。从上图可以看到 bluetooth 驱动调用关系:mtk_stp_bt.ko -> mtk_stp_wmt.ko -> mtk_stp_uart.ko -> uart driver最后最底层的串口驱动负责蓝牙命令,数据的发送与接收.1.3.2 代码修改1 根据硬件连接情况配置必要的平台资源修改文件: kernel/iTop4412_Kernel_3.0/arch/arm/mach-exynos/mach-itop4412.c关键函数: 该函数配置 MT6620 相关的 GPIO 引脚为初始化输出状态,或者配置为中断状态,Bluetooth 驱动会改变这些引脚的状态,这里仅仅是初始化.static void __init mtk_combo_init(void){//MT66XX PMUENif(gpio_request(EXYNOS4_GPC1(0), "GPC1_0")){printk(KERN_ERR "failed to request GPC1_0 for MT6620 PMUENcontrol\n");}//MT66XX SYSRSTif(gpio_request(EXYNOS4_GPC1(1), "GPC1_1")){printk(KERN_ERR "failed to request GPC1_1 for MT6620 SYSRST control\n");}s3c_gpio_cfgpin(EXYNOS4_GPC1(0), S3C_GPIO_OUTPUT);s3c_gpio_cfgpin(EXYNOS4_GPC1(1), S3C_GPIO_OUTPUT);gpio_direction_output(EXYNOS4_GPC1(0), 0);gpio_direction_output(EXYNOS4_GPC1(1), 0);gpio_free(EXYNOS4_GPC1(0));gpio_free(EXYNOS4_GPC1(1));mdelay(5);//need config eint models for Wifi & BGA Interuptif (gpio_request(EXYNOS4_GPX2(5), "WiFi INT"))printk(KERN_WARNING "MT6620 WiFi INT(GPX2.5) Port request error!!!\n");else {s3c_gpio_setpull(EXYNOS4_GPX2(5), S3C_GPIO_PULL_NONE);s3c_gpio_cfgpin(EXYNOS4_GPX2(5), S3C_GPIO_SFN(0xF));gpio_free(EXYNOS4_GPX2(5));}if (gpio_request(EXYNOS4_GPX2(4), "BGF INT"))printk(KERN_WARNING "MT6620 BGA INT(GPX2.4) Port request error!!!\n");else {s3c_gpio_setpull(EXYNOS4_GPX2(4), S3C_GPIO_PULL_NONE);s3c_gpio_cfgpin(EXYNOS4_GPX2(4), S3C_GPIO_SFN(0xF));gpio_free(EXYNOS4_GPX2(4));}//normal it is high levelif (gpio_request(EXYNOS4_GPX3(2), "6260_GPIO2")!=0) {printk("[mt6620] ERROR:Cannot request 6260_GPIO2\n");} else {gpio_direction_output(EXYNOS4_GPX3(2), 1);/* WLAN_CHIP_PWD */gpio_set_value(EXYNOS4_GPX3(2), 1);mdelay(100);gpio_free(EXYNOS4_GPX3(2));}return; }关键结构体: 该结构体告诉 MT6620 驱动相关部分使用了平台的哪些 GPIO 资源.结构体所属文件: kernel/iTop4412_Kernel_3.0/arch/arm/mach-exynos/mach-itop4412.cstatic struct mtk_wmt_platform_data mtk_wmt_pdata = {.pmu =EXYNOS4_GPC1(0), //RK30SDK_WIFI_GPIO_POWER_N,//RK30_PIN0_PB5,//MUST set to pin num in target system.rst = EXYNOS4_GPC1(1),//RK30SDK_WIFI_GPIO_RESET_N,//RK30_PIN3_PD0, //MUSTset to pin num in target system.bgf_int=EXYNOS4_GPX2(4),//IRQ_EINT(20),//RK30SDK_WIFI_GPIO_BGF_INT_B,//RK30_PIN0_PA5,//MUST set to pin num intarget system if use UART interface..urt_cts = -EINVAL, // set it to the correct GPIO num if use common SDIO, otherwise setit to -EINVAL..rtc = -EINVAL, //Optipnal. refer to HW design..gps_sync = -EINVAL, //Optional. refer to HW design..gps_lna = -EINVAL, //Optional. refer to HW design.};static struct mtk_sdio_eint_platform_data mtk_sdio_eint_pdata = {.sdio_eint =EXYNOS4_GPX2(5),//IRQ_EINT(21) ,//RK30SDK_WIFI_GPIO_WIFI_INT_B,//53, //MUST set pinnum in target system.};static struct platform_device mtk_wmt_dev = {.name = "mtk_wmt",.id = 1,.dev = {.platform_data = &mtk_wmt_pdata,},};static struct platform_device mtk_sdio_eint_dev = {.name = "mtk_sdio_eint",.id = 1,.dev = {.platform_data = &mtk_sdio_eint_pdata,},};MTK 官方移植文档中会告诉我们需要在原始内核代码里面增加哪些文件,如何在 makemenuconfig 中配置相关部分,这里就不再详细描述.注意:蓝牙驱动虽然没有使用到 mmc 总线,但是 mtp_hif_sdio.ko 驱动导出了接口函数,mtk_stp_wmt.ko 核心驱动库 会调用导出函数以 ,所以 mtp_hif_sdio.ko 需要加载到内核空间,有 如果您的产品中不含有 WiFi , 仅仅需要 Bluetooth 功能,那么完全可以不用配置 MMC 总线部分,不影响蓝牙的使用 ,但是务必加载 mtp_hif_sdio.ko 文件。另外 MT6620 具备功耗控制功能,默认情况下如果 MT6620 处于 idle 空闲状态,空闲时间大于 60 秒后,会自动进入 sleep 状态,有中断触发时会唤醒,继续工作,您可以使用 "echo0 0 > /proc/driver/wmt_dbg "命令关闭功耗控制,这样MT6620会始终不会进入sleep状态。另外也可以修改 MT6620 mtk_stp_wmt.ko 驱动中的参数,更改 ide to sleep 的时间.MTK 官方提供的驱动代码中芯片默认 idle 5 秒后会进入 sleep 状态,使用蓝牙接收文件时,如果用户响应时间超过了 5 秒(用户没有单击接收或者拒绝按钮),MT6620 会休眠,驱动会导致 MT6620 会进入 RESET 状态,从而 Bluetooth 服务会出现问题,Bluetooth功能不可使用,为了避免这样的问题发生,我们把休眠时间由默认的 5 秒调整到了 60 秒,给用户足够多的响应时间,用户在 60 秒内 接收或者拒绝蓝牙手机发给板卡的文件,另外文件接收完成后,需要单击状态栏中的文件接收完成提示,尽量在 Android4.4 状态栏中不含有关于蓝牙消息的提醒。u1.4 用户态空间下面我们描述一下采用 Linux 系统和 Android 系统的用户都需要注意的地方:驱动层移植完成后, MTK 的 Porting Guid 会告诉你需要在用户态运行 wmt_launcher 工具,作为后台的一个服务程序运行,该服务会配置串口的工作参数,下载固件补丁到 MT6620中,他的源代码相对比较简单,只有一个.c 文件:原始文件位于 MTK 发布包:APEX_Android_4.4_MP_SW_package_V2.0/APEX_Android_4.4_MP_001_panda_combo_mt66xx_Package_Common/New/hardware/mediatek/wmt/stp_uart_launcher.c修改后的文件位于 iTOP-4412 Android4.4 发布包:iTop4412_KK4.4/hardware/mediatek/wmt/stp_uart_launcher.c修改点主要在串口参数配置上,由于内核版本不同,串口设置参数也略有不同.具体修改可以使用代码比对工具进行比较。另外需要说明的是运行 wmt_launcher 的运行参数 跟 MTK 给的移植文档有点不同,Porting Guid 里面推荐串口波特率使用 921600, 而在 iTOP-4412 的板子上面采用该值会工作不正常,导致固件补丁无法下载,开始怀疑板卡不支持该波特率,后使用串口测试工具专门针对这个串口进行 921600 测试,也没发现问题,后没有继续查找,而是运行 wmt_launcher 时采用 115200波特率:wmt_launcher -b 115200 -d /dev/ttySAC0 -p /system/etc/firmware &注意: 如果您的操作系统使用的是 Linux 而不是 Android,需要修改 stp_uart_launcher.c原始代码里面有 Android 特有的属性相关部分,Linux 系统不具有这个特性,我们提供了修改好的 文 件 : stp_uart_launcher-linux-ok.c , 用 户 可 以 作 为 参 考 , 该 文 件 与 原 始 文 件stp_uart_launcher-ori.c,及正常工作的文件 stp_uart_launcher.c 位于相同目录下面.无论是 Linux 系统还是 Android 系统,挂载根文件系统以后需要运行 wmt_launcher 服务,该服务在后台运行,打开 /dev/ttySAC0 串口,监控着串口上报的事件,对事件进行响应,比如内核上报 "下载固件补丁" 事件,那么 wmt_launcher 会打开 /system/etc/firmware 下面的固件补丁,然后下载到 MT6620 模块中,该服务不可以被用户终止运行.1.5 HAL 层移植Bluetooth 的 HAL 层主要有 Bluedroid 协议栈与 MT6620 vendor 提供底层库文件组成。
上图红色部分 BlueZ, Hci_stp.ko 为 Android4.0 Bluetooth 使用的蓝牙协议栈与 Kernel 库文件。蓝色部分 Bluedroid, mtk_stp.bt.ko 为 Android4.4 版本使用的蓝牙协议栈与 kernel 库文件。Android4.0 与 Android4.4 关于 Bluetooth 部分变化比较大,请大家移植过程中注意这一点,他们之间的具体差异这里不再讲解。从上图可以看到 bluetooth 驱动调用关系:mtk_stp_bt.ko -> mtk_stp_wmt.ko -> mtk_stp_uart.ko -> uart driver最后最底层的串口驱动负责蓝牙命令,数据的发送与接收.1.3.2 代码修改1 根据硬件连接情况配置必要的平台资源修改文件: kernel/iTop4412_Kernel_3.0/arch/arm/mach-exynos/mach-itop4412.c关键函数: 该函数配置 MT6620 相关的 GPIO 引脚为初始化输出状态,或者配置为中断状态,Bluetooth 驱动会改变这些引脚的状态,这里仅仅是初始化.static void __init mtk_combo_init(void){//MT66XX PMUENif(gpio_request(EXYNOS4_GPC1(0), "GPC1_0")){printk(KERN_ERR "failed to request GPC1_0 for MT6620 PMUENcontrol\n");}//MT66XX SYSRSTif(gpio_request(EXYNOS4_GPC1(1), "GPC1_1")){printk(KERN_ERR "failed to request GPC1_1 for MT6620 SYSRST control\n");}s3c_gpio_cfgpin(EXYNOS4_GPC1(0), S3C_GPIO_OUTPUT);s3c_gpio_cfgpin(EXYNOS4_GPC1(1), S3C_GPIO_OUTPUT);gpio_direction_output(EXYNOS4_GPC1(0), 0);gpio_direction_output(EXYNOS4_GPC1(1), 0);gpio_free(EXYNOS4_GPC1(0));gpio_free(EXYNOS4_GPC1(1));mdelay(5);//need config eint models for Wifi & BGA Interuptif (gpio_request(EXYNOS4_GPX2(5), "WiFi INT"))printk(KERN_WARNING "MT6620 WiFi INT(GPX2.5) Port request error!!!\n");else {s3c_gpio_setpull(EXYNOS4_GPX2(5), S3C_GPIO_PULL_NONE);s3c_gpio_cfgpin(EXYNOS4_GPX2(5), S3C_GPIO_SFN(0xF));gpio_free(EXYNOS4_GPX2(5));}if (gpio_request(EXYNOS4_GPX2(4), "BGF INT"))printk(KERN_WARNING "MT6620 BGA INT(GPX2.4) Port request error!!!\n");else {s3c_gpio_setpull(EXYNOS4_GPX2(4), S3C_GPIO_PULL_NONE);s3c_gpio_cfgpin(EXYNOS4_GPX2(4), S3C_GPIO_SFN(0xF));gpio_free(EXYNOS4_GPX2(4));}//normal it is high levelif (gpio_request(EXYNOS4_GPX3(2), "6260_GPIO2")!=0) {printk("[mt6620] ERROR:Cannot request 6260_GPIO2\n");} else {gpio_direction_output(EXYNOS4_GPX3(2), 1);/* WLAN_CHIP_PWD */gpio_set_value(EXYNOS4_GPX3(2), 1);mdelay(100);gpio_free(EXYNOS4_GPX3(2));}return; }关键结构体: 该结构体告诉 MT6620 驱动相关部分使用了平台的哪些 GPIO 资源.结构体所属文件: kernel/iTop4412_Kernel_3.0/arch/arm/mach-exynos/mach-itop4412.cstatic struct mtk_wmt_platform_data mtk_wmt_pdata = {.pmu =EXYNOS4_GPC1(0), //RK30SDK_WIFI_GPIO_POWER_N,//RK30_PIN0_PB5,//MUST set to pin num in target system.rst = EXYNOS4_GPC1(1),//RK30SDK_WIFI_GPIO_RESET_N,//RK30_PIN3_PD0, //MUSTset to pin num in target system.bgf_int=EXYNOS4_GPX2(4),//IRQ_EINT(20),//RK30SDK_WIFI_GPIO_BGF_INT_B,//RK30_PIN0_PA5,//MUST set to pin num intarget system if use UART interface..urt_cts = -EINVAL, // set it to the correct GPIO num if use common SDIO, otherwise setit to -EINVAL..rtc = -EINVAL, //Optipnal. refer to HW design..gps_sync = -EINVAL, //Optional. refer to HW design..gps_lna = -EINVAL, //Optional. refer to HW design.};static struct mtk_sdio_eint_platform_data mtk_sdio_eint_pdata = {.sdio_eint =EXYNOS4_GPX2(5),//IRQ_EINT(21) ,//RK30SDK_WIFI_GPIO_WIFI_INT_B,//53, //MUST set pinnum in target system.};static struct platform_device mtk_wmt_dev = {.name = "mtk_wmt",.id = 1,.dev = {.platform_data = &mtk_wmt_pdata,},};static struct platform_device mtk_sdio_eint_dev = {.name = "mtk_sdio_eint",.id = 1,.dev = {.platform_data = &mtk_sdio_eint_pdata,},};MTK 官方移植文档中会告诉我们需要在原始内核代码里面增加哪些文件,如何在 makemenuconfig 中配置相关部分,这里就不再详细描述.注意:蓝牙驱动虽然没有使用到 mmc 总线,但是 mtp_hif_sdio.ko 驱动导出了接口函数,mtk_stp_wmt.ko 核心驱动库 会调用导出函数以 ,所以 mtp_hif_sdio.ko 需要加载到内核空间,有 如果您的产品中不含有 WiFi , 仅仅需要 Bluetooth 功能,那么完全可以不用配置 MMC 总线部分,不影响蓝牙的使用 ,但是务必加载 mtp_hif_sdio.ko 文件。另外 MT6620 具备功耗控制功能,默认情况下如果 MT6620 处于 idle 空闲状态,空闲时间大于 60 秒后,会自动进入 sleep 状态,有中断触发时会唤醒,继续工作,您可以使用 "echo0 0 > /proc/driver/wmt_dbg "命令关闭功耗控制,这样MT6620会始终不会进入sleep状态。另外也可以修改 MT6620 mtk_stp_wmt.ko 驱动中的参数,更改 ide to sleep 的时间.MTK 官方提供的驱动代码中芯片默认 idle 5 秒后会进入 sleep 状态,使用蓝牙接收文件时,如果用户响应时间超过了 5 秒(用户没有单击接收或者拒绝按钮),MT6620 会休眠,驱动会导致 MT6620 会进入 RESET 状态,从而 Bluetooth 服务会出现问题,Bluetooth功能不可使用,为了避免这样的问题发生,我们把休眠时间由默认的 5 秒调整到了 60 秒,给用户足够多的响应时间,用户在 60 秒内 接收或者拒绝蓝牙手机发给板卡的文件,另外文件接收完成后,需要单击状态栏中的文件接收完成提示,尽量在 Android4.4 状态栏中不含有关于蓝牙消息的提醒。u1.4 用户态空间下面我们描述一下采用 Linux 系统和 Android 系统的用户都需要注意的地方:驱动层移植完成后, MTK 的 Porting Guid 会告诉你需要在用户态运行 wmt_launcher 工具,作为后台的一个服务程序运行,该服务会配置串口的工作参数,下载固件补丁到 MT6620中,他的源代码相对比较简单,只有一个.c 文件:原始文件位于 MTK 发布包:APEX_Android_4.4_MP_SW_package_V2.0/APEX_Android_4.4_MP_001_panda_combo_mt66xx_Package_Common/New/hardware/mediatek/wmt/stp_uart_launcher.c修改后的文件位于 iTOP-4412 Android4.4 发布包:iTop4412_KK4.4/hardware/mediatek/wmt/stp_uart_launcher.c修改点主要在串口参数配置上,由于内核版本不同,串口设置参数也略有不同.具体修改可以使用代码比对工具进行比较。另外需要说明的是运行 wmt_launcher 的运行参数 跟 MTK 给的移植文档有点不同,Porting Guid 里面推荐串口波特率使用 921600, 而在 iTOP-4412 的板子上面采用该值会工作不正常,导致固件补丁无法下载,开始怀疑板卡不支持该波特率,后使用串口测试工具专门针对这个串口进行 921600 测试,也没发现问题,后没有继续查找,而是运行 wmt_launcher 时采用 115200波特率:wmt_launcher -b 115200 -d /dev/ttySAC0 -p /system/etc/firmware &注意: 如果您的操作系统使用的是 Linux 而不是 Android,需要修改 stp_uart_launcher.c原始代码里面有 Android 特有的属性相关部分,Linux 系统不具有这个特性,我们提供了修改好的 文 件 : stp_uart_launcher-linux-ok.c , 用 户 可 以 作 为 参 考 , 该 文 件 与 原 始 文 件stp_uart_launcher-ori.c,及正常工作的文件 stp_uart_launcher.c 位于相同目录下面.无论是 Linux 系统还是 Android 系统,挂载根文件系统以后需要运行 wmt_launcher 服务,该服务在后台运行,打开 /dev/ttySAC0 串口,监控着串口上报的事件,对事件进行响应,比如内核上报 "下载固件补丁" 事件,那么 wmt_launcher 会打开 /system/etc/firmware 下面的固件补丁,然后下载到 MT6620 模块中,该服务不可以被用户终止运行.1.5 HAL 层移植Bluetooth 的 HAL 层主要有 Bluedroid 协议栈与 MT6620 vendor 提供底层库文件组成。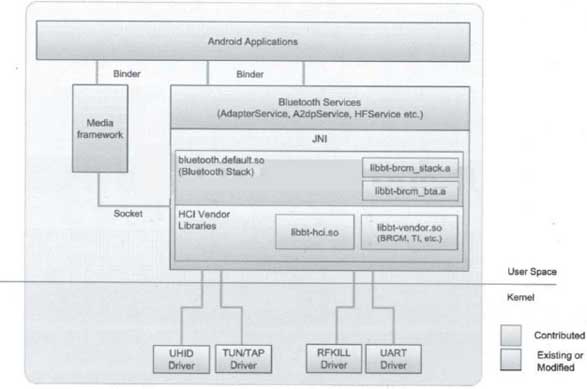 需要我们重点关注的有 bluetooth.default.so 该动态库文件提供了 Framework 层调用 HAL层的 API 接口,同时向下调用 libbt-hci.so 。bluetooth.default.so 包含两个静态库:libbt-brm_stack.a libbt-brm_bta.a . libbt-brm_stack.a 提供 Bluetooth 各种 profiles 的支持, 比如 a2dp,hid,pan 等等, libbt-brm_bta.a 用于与framdwork 层进行通信.libbt-hci.so 该动态库提供 bluetooth.default.so 的底层支持,另外他会调用 libbt-vendor.so 接口,通过串口发送,接收命令,数据的操作也是通过该动态库实现的。他位于 bluedroid 源码目录hci 文件夹下。libbt-vendor.so 厂 商 库 文 件 , 用 于 实 现 厂 商 提 供 的 蓝 牙 模 块 特 性 支 持 , 库 文 件 位 于android4.4/iTop4412_KK4.4/hardware/mediatek/bt/combo_mt66 目录下。1.5.1 Bluedroid从 Android 4.2 开始,Bluetooth stack 发生了重大改变:从 Bluez 换成了由 Google 和 Broadcom联合开发的 Bluedroid(当然,核心的部分还是 Broadcom 的,Google 主要是做了和上层 Framework相关的部分)。Bluedroid 和 Bluez 相比,有如下优点:■ 层次结构清晰。各个 profile 对上层接口统一,便于增加新的 profile;■ 增加了 HAL 层,便于移植。■ 去掉了 DBus,Framework 的 Java 代码直接调用到 Bluedroid 的 Native 代码。但是 Android 4.2 中的 Bluedroid 与 Android 4.0 中的 Bluez 相比,功能要少,例如不支持 AVRCP1.3, Bug较多,例如某些蓝牙耳机不能重拨最后一个电话。最重要的是4.2的Bluedroid不支持BLE。不过在刚刚发布的 Android 4.3 中已经有了很多改进,AVRCP 1.3 和 BLE 都得到了支持。目前有一些Android 4.1或4.2的设备是支持BLE的,但是都是采用的Vendor自己的解决方案,比如 Bluetooth stack 采用 Bluez 5.x,再提供 Vendor BLE Android SDK. 现在 Android 4.4 已经发布,从未来发展趋势来看,如果有人要学习 Bluetooth in Android,建议不要再研究 Bluez,最好转向Bluedroid。以下是 Android 4.4 中 Bluetooth 相关代码之分布:
需要我们重点关注的有 bluetooth.default.so 该动态库文件提供了 Framework 层调用 HAL层的 API 接口,同时向下调用 libbt-hci.so 。bluetooth.default.so 包含两个静态库:libbt-brm_stack.a libbt-brm_bta.a . libbt-brm_stack.a 提供 Bluetooth 各种 profiles 的支持, 比如 a2dp,hid,pan 等等, libbt-brm_bta.a 用于与framdwork 层进行通信.libbt-hci.so 该动态库提供 bluetooth.default.so 的底层支持,另外他会调用 libbt-vendor.so 接口,通过串口发送,接收命令,数据的操作也是通过该动态库实现的。他位于 bluedroid 源码目录hci 文件夹下。libbt-vendor.so 厂 商 库 文 件 , 用 于 实 现 厂 商 提 供 的 蓝 牙 模 块 特 性 支 持 , 库 文 件 位 于android4.4/iTop4412_KK4.4/hardware/mediatek/bt/combo_mt66 目录下。1.5.1 Bluedroid从 Android 4.2 开始,Bluetooth stack 发生了重大改变:从 Bluez 换成了由 Google 和 Broadcom联合开发的 Bluedroid(当然,核心的部分还是 Broadcom 的,Google 主要是做了和上层 Framework相关的部分)。Bluedroid 和 Bluez 相比,有如下优点:■ 层次结构清晰。各个 profile 对上层接口统一,便于增加新的 profile;■ 增加了 HAL 层,便于移植。■ 去掉了 DBus,Framework 的 Java 代码直接调用到 Bluedroid 的 Native 代码。但是 Android 4.2 中的 Bluedroid 与 Android 4.0 中的 Bluez 相比,功能要少,例如不支持 AVRCP1.3, Bug较多,例如某些蓝牙耳机不能重拨最后一个电话。最重要的是4.2的Bluedroid不支持BLE。不过在刚刚发布的 Android 4.3 中已经有了很多改进,AVRCP 1.3 和 BLE 都得到了支持。目前有一些Android 4.1或4.2的设备是支持BLE的,但是都是采用的Vendor自己的解决方案,比如 Bluetooth stack 采用 Bluez 5.x,再提供 Vendor BLE Android SDK. 现在 Android 4.4 已经发布,从未来发展趋势来看,如果有人要学习 Bluetooth in Android,建议不要再研究 Bluez,最好转向Bluedroid。以下是 Android 4.4 中 Bluetooth 相关代码之分布: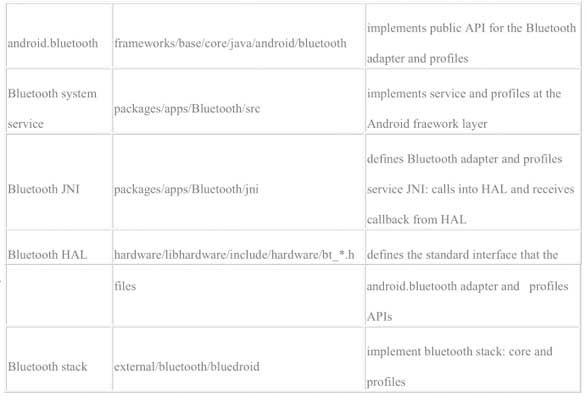 笔者在进行 Bluetooth 的调试过程中,使用 Logcat 命令输出 Android 的调试信息,在 Android的Setting界面开启蓝牙功能,根据打印信息的输出,发现Enable Bluetooth的过程中出现了问题,最后查找原因是因为 MT6620 芯片工作前需要需要下载固件补丁,这个过程需要花费一定的时间,然后 bluetooth.default.so 库文件代码中对开启 Bluetooth 有一定的时间限制,默认情况下是 3000毫秒的超时时间,超时后会 disable 蓝牙,后经笔者修改为 20 000 毫秒,这样即可 enable 蓝牙芯片,从而进入工作状态.修改文件: iTop4412_KK4.4/external/bluetooth/bluedroid/Android.mk
笔者在进行 Bluetooth 的调试过程中,使用 Logcat 命令输出 Android 的调试信息,在 Android的Setting界面开启蓝牙功能,根据打印信息的输出,发现Enable Bluetooth的过程中出现了问题,最后查找原因是因为 MT6620 芯片工作前需要需要下载固件补丁,这个过程需要花费一定的时间,然后 bluetooth.default.so 库文件代码中对开启 Bluetooth 有一定的时间限制,默认情况下是 3000毫秒的超时时间,超时后会 disable 蓝牙,后经笔者修改为 20 000 毫秒,这样即可 enable 蓝牙芯片,从而进入工作状态.修改文件: iTop4412_KK4.4/external/bluetooth/bluedroid/Android.mk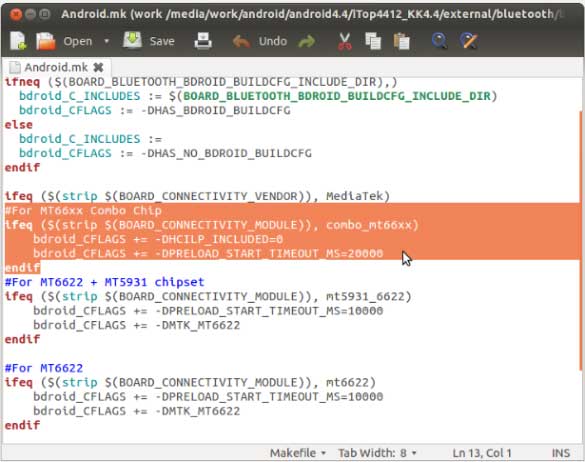 1.5.2 init.connectivity.rc 文件init.connectivity.rc 文件路径:iTop4412_KK4.4/hardware/mediatek/config/combo_mt66xx/ init.combo_mt66xx.rc原始文件名称为 init.combo_mt66xx.rc,拷贝到 ramdisk 的 root 目录下面名称变更为init.connectivity.rc 文件 。我们在该文件增加了加载驱动模块库操作,运行 wmt_lanucher 服务操作,另外需要注意文件原有的创建 bluetooth 相关目录操作,及修改权限,变更拥有者,这些 command 非常的重要,比如:# Load Blue moduleinsmod /system/lib/modules/mtk_stp_bt.kochmod 0660 /dev/stpbtchown bluetooth system /dev/stpbtmkdir /data/bluetooth 0711 bluetooth bluetoothmkdir /data/misc/bluedroid 0771 bluetooth bluetooth1.5 总结用户在移植 HAL 层之前可以先使用 MTK 提供的蓝牙测试工具 autobt 进行测试,该测试工具脱落复杂的 HAL 层,直接调用 libbt-vendor.so 也就是厂商自己的库文件,在 Android 的命令行中执行即可,可以使用该命令查询其他的蓝牙设备,发送,接收文件等等。是判断蓝牙硬件是否正常工作的有力工具,使用autobt测试通过后,再调试Android HAL及上层部分。autobt 工具的源码位于:iTop4412_KK4.4/hardware/mediatek/utility/hw_test_tool/bluetooth/src/tool另外 MTK 官方提供了 Bluetooth 的多个补丁,路径:APEX_Android_4.4_MP_SW_package_V2.0/Document/BT_patch_description(must read)这些补丁是比较重要的,有关于蓝牙基础连接方面的,也有关于蓝牙文件发送接收,蓝牙鼠标,蓝牙耳机方面的,需要根据您的产品需求打对应的补丁,我们发布的 Android4.4代码中已经打上了蓝牙基础连接,和文件发送接收方面的补丁,其他的补丁未处理.
1.5.2 init.connectivity.rc 文件init.connectivity.rc 文件路径:iTop4412_KK4.4/hardware/mediatek/config/combo_mt66xx/ init.combo_mt66xx.rc原始文件名称为 init.combo_mt66xx.rc,拷贝到 ramdisk 的 root 目录下面名称变更为init.connectivity.rc 文件 。我们在该文件增加了加载驱动模块库操作,运行 wmt_lanucher 服务操作,另外需要注意文件原有的创建 bluetooth 相关目录操作,及修改权限,变更拥有者,这些 command 非常的重要,比如:# Load Blue moduleinsmod /system/lib/modules/mtk_stp_bt.kochmod 0660 /dev/stpbtchown bluetooth system /dev/stpbtmkdir /data/bluetooth 0711 bluetooth bluetoothmkdir /data/misc/bluedroid 0771 bluetooth bluetooth1.5 总结用户在移植 HAL 层之前可以先使用 MTK 提供的蓝牙测试工具 autobt 进行测试,该测试工具脱落复杂的 HAL 层,直接调用 libbt-vendor.so 也就是厂商自己的库文件,在 Android 的命令行中执行即可,可以使用该命令查询其他的蓝牙设备,发送,接收文件等等。是判断蓝牙硬件是否正常工作的有力工具,使用autobt测试通过后,再调试Android HAL及上层部分。autobt 工具的源码位于:iTop4412_KK4.4/hardware/mediatek/utility/hw_test_tool/bluetooth/src/tool另外 MTK 官方提供了 Bluetooth 的多个补丁,路径:APEX_Android_4.4_MP_SW_package_V2.0/Document/BT_patch_description(must read)这些补丁是比较重要的,有关于蓝牙基础连接方面的,也有关于蓝牙文件发送接收,蓝牙鼠标,蓝牙耳机方面的,需要根据您的产品需求打对应的补丁,我们发布的 Android4.4代码中已经打上了蓝牙基础连接,和文件发送接收方面的补丁,其他的补丁未处理.
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

