
数字信号处理就是用一些数学算法对数字信号进行分析、变换、综合、估值和识别。作为数字信号处理核心和标志的数字信号处理器(DSP)芯片自问世以来得到了快速的发展,广泛应用于通信系统、图形/图像处理、雷达声纳、医学信号处理等实时信号处理领域。随着人们对实时信号处理要求的不断提高和大规模集成电路技术的迅速发展,数字信号处理器也发生着日新月异的变革。美国AD公司,继16b定点ADSP21xx和32b浮点ADSP21xxx系列之后推出的ADSPTIgerSHARC系列处理器,是基于AD2106x的下一代高性能芯片。本文着重介绍TIgerSHARC系列中TS101S芯片的性能及结构特点,并将其应用在雷达信号处理系统设计中。
1TIgerSHARCDSP
TIgerSHARCDSP器件的主要性能如下:
(1)最高运行速度为300MHz,指令周期为3.3ns。
(2)带有6Mb片内SRAM,分为了3个2Mb的存储块M0,M1和M2,每一个存储块都能够单独存储程序、数据或同时存储程序和数据。
(3)带有双运算模块,每个运算块有1个64bALU,1个乘法器,1个64b移位器和1个由32个寄存器构成的寄存器组,可执行定点和浮点的算术逻辑等通用运算。
(4)3条内部地址/数据总线,每条总线都连接到3个内部存储器块中的1个。3条总线都是128b宽,可以在任一周期使用任一条总线传送多达4条指令或4个对齐的数据。这样TS101S内核可以在任一周期并行访问3个存储块,1个取指令,2个访问数据。
(5)4个链路口支持点对点的高带宽数据传送,可通过单个链接口以250Mb/s的速率进行数据传输。4个链路口为处理器与处理器之间的通讯提供了一个良好的途径,总吞吐量多达1Gb/s。
(6)多处理器特性,当单个DSP芯片组成的系统不能满足处理要求时,TS101S通过外部口或链路口与其他TS101S相连构成多处理器系统。TS101S的外部总线支持多达8个DSP外加Host处理器的并行总线连接。在构成多处理器系统时,处理器之间无论是采用共享总线方式,还是采用链路口互连方式,都不需任何外加控制,实现无缝连接,在并行总线上可以800Mb/s的速率进行数据传输。
(7)有DMA和SDRAM控制器,拥有14个DMA通道,提供了在处理器核不干预条件下的零开销数据传输,SDRAM的地址、数据引脚可以与TigerSHARC的直接相连,另外,TigerSHARC提供专用的寻址空间支持SDRAM。
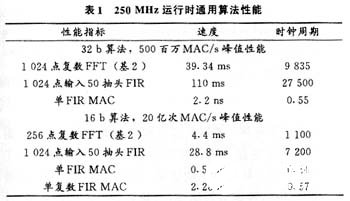
TS101S的主要性能指标如表1所示。
2信号处理系统的实现
图1所示是一个雷达信号处理系统的硬件框图。为了简化系统硬件,减少DSP片间连线,该系统的4个DSP以松耦合的链路方式进行连接,并共用一片FPGA。
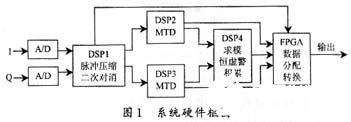
首先由DSP1通过外部DMA方式读入中频解调后的I、Q路数据,并由DSP1对读入数据进行脉冲压缩(匹配滤波),脉冲压缩后进行二次对消,以消除固定杂波。设计总距离单元数为2000,需做2048点复数FFT,当2048点复数FFT完成后,还必须和预先存储好的匹配滤波器系数H(k)相乘,一般需要做2048个复数乘法,相乘结果还需做2048点复数IFFT以获得脉冲压缩结果。TigerSHARCDSP做2048点复数FFT和IFFT大约需要200μs(工作在250MHz),利用TigerSHARCDSP的双运算块和单指令多数据(SIMD)特点同时进行两个距离单元的复数乘法,完成2048个复数乘法仅需25μs。二次对消对于每个距离单元都需要做2次减法和1次加法,2000个距离单元的二次对消大约需要50μs。DSP完成上述运算大约要300μs。
DSP2和DSP3完成动目标检测功能。在使用窄带多谱勒滤波器组时,为了降低旁瓣可在系统中采用滑窗加权FFT的方法,在距离单元数为2000时大约需要640μs处理时间,用2片DSP并行处理即可实现。
求模采用近似算法,每个距离单元只用做1次比较和1次加法。恒虚警处理先进行选大单元平均运算,再对被检单元进行比较判决,从而降低
虚警率。积累采用简单累加求平均的方式完成。以上3种运算由DSP4实现。
FPGA在电路中起辅助作用,在数据量较大的情况下进行数据寄存和分配,同时也能担负DSP4的工作,如果需要的话还能进行数据的并/串转换工作。
3TigerSHARCDSP的使用
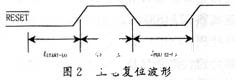
为保证TigerSHARCDSP能正常工作,上电复位信号的设计非常重要。上电复位波形要求如图2所示,但应注意tSTARTLO在供电稳定之后必须至少大于1ms,tPULSE1HI必须大于50个系统时钟周期,同时小于100个系统时钟周期,tPULSE2LO必须大于100个系统时钟周期,在DSP上电后,如需正常复位,其低电平持续时间必须大于100个系统时钟周期。
TigerSHARCDSP有3个电源,其中数字3.3V为I/O供电,数字1.2V为DSP内核供电,模拟1.2V为内部锁相环和倍频电路供电。TigerSHARCDSP要求数字3.3V和1.2V应同时上电。若无法严格同步,则应保证内核电源1.2V先上电,I/O电源3.3V后上电。本系统在数字3.3V输入端并联了一个大电容,而在数字1.2V输入端并联了一个小电容,其目的就是为了保证3.3V充电时间大于1.2V充电时间,以便很好地解决电源供电的先后问题。
TigerSHARCDSP内核最大电流为1.277A,该电流是DSP进行单指令多数据(SIMD)方式下,4个16b定点字乘加与2个4字读取并行操作以及进行由外部口到内部存储器DMA操作所需的电流。实际上,DSP内核电流大小还和内核工作频率有关,因此,供给DSP内核电流可根据不同的并行处理任务和内核工作频率来确定,最大内核功耗为1.534W。外部口的功耗(对VDDIO)主要是输出引脚(例如数据线的某个位由高到低,或由低到高)转换的功率消耗,而且该功耗与系统无关,一般为0.45W。由此可估算出该信号处理系统的功耗大约为10W。
4结语
本文介绍了多片TigerSHARCDSP在雷达信号处理系统中的应用,该系统充分利用了TS101S高速的运算能力及数据吞吐量,对不同的距离单元段进行并行处理。文中分析了系统的运算量、所需时间以及完成算法所需的DSP数,并且讨论了DSP应用过程中需注意的几个问题,具有很强的实用性。该系统外接计算机总线,预留链路口,按信号处理通用板的模式设计,也就是说,当单板资源不够时,通过增加板子的数量就可成倍地增加信号处理能力,这对于各种新型号雷达的开发研制起到了事半功倍的作用,大大缩短了研发周期,具有广泛的应用价值。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

