
作者:Wesley He
TI mmWave sensor是高集成度的毫米波雷达传感器SOC,在开发过程中,SDK及TI DEMO均使用灵活的UART接口发送CLI命令进行射频参数配置及相关算法参数的配置。对于研发及测试认证过程中,往往都会有对连续波点频率模式设置的要求。本文介绍一种可以把连续波模式配置增添到应用代码中的实现方式,同时支持原有串口的CLI配置,仅需增加APP层代码,无需修改SDK驱动层代码,即可完成FMCW chirp模式或连续波CW模式的设置,旨在给用户提供一种简洁的配置方式,方便用户对毫米波雷达模块进行RF性能、天线方向图、频带内外性能、电源可靠性等测试。本文的测试环境如下:
此方法适用器件型号:I/AWR1443, I/AWR1642, I/AWR1843, I/AWR6843
本文测试硬件平台:IWR6843ISK EVM
1. 使用mmWave studio工具的连续波(点频)模式配置方法
DCA1000EVM是一款数据采集卡,适配于德州仪器(TI)的77GHz&60GHz 毫米波雷达传感器EVM高速60PIN接口,采集卡主要功能是使用户能够通过DCA1000板卡的以太网获得从雷达的LVDS接口送出的ADC数据;于此同时,DCA1000EVM也板载了USB<->SPI接口,方便PC软件对雷达传感器芯片进行配置。
mmWave Studio是一款独立的 Windows GUI,它具有配置和控制 TI 毫米波传感器模块以及收集 ADC 数据以进行离线分析的功能。该 ADC 数据捕获旨在评估和表征射频性能,以及进行信号处理算法的 PC 开发。下图是使用DCA1000+mmWave Studio 软件进行毫米波雷达数据采集的框图,PC上使用mmWave Studio 软件,通过USBßàSPI接口对毫米波雷达芯片进行工作模式配置并采集数据。可支持包括chirping mode、advance frame mode、continuous wave mode在内的全部毫米波雷达RF配置,并且GUI集成的数据分析功能可对采集回来的数据进行初步的分析。
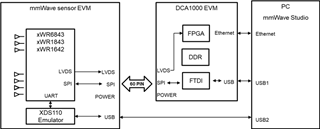
图1. 使用DCA1000+mmWave Studio软件进行数据采集框图
mmWave studio GUI 中连续波模式的设置界面如下图所示,用户仅需遵循mmWave studio软件的配置流程,配置毫米波雷达芯片于连续波工作模式即可,于此同时,DCA1000EVM还可以从LVDS接口获取在连续波模式下的接收通道获取的ADC数据。
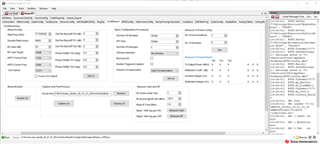
图2. mmWave studio GUI 中连续波模式的设置界面示意图
小结,使用DCA1000EVM +mmWave Studio软件组合的要求及优势如下:
硬件:mmWave radar sensor EVM + DCA1000EVM + PC
软件:mmWave studio
Radar硬件所需预留接口:LVDS(ADC数据传输) + SPI(RF参数配置) + UART(固件加载)+ SOP(SOC启动模式配置)
优势:RF所有的配置都支持,同时可以获取点频模式下的ADC数据,可以同步分析RX性能。
2. 使用mmWave Studio CLI tools工具的连续波(点频)模式配置方法
mmWave Studio CLI tools是使用命令行界面 (CLI) 控制毫米波传感器的GUI工具,可以替换mmWave Studio的基本功能,对比于完整功能的mmWave Studio,mmWave Studio CLI tools是一个轻量化的工具,它使用与OOB(SDK out-of-box demo) 相同的配置方式与命令,同时,在硬件连接的需求上,省了一个SPI接口,所以在外场测试过程中,能够简化硬件连接及操作流程。
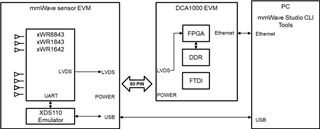
图3. 使用DCA1000+mmWave Studio CLI tools组合的硬件连接框图
mmWave studio CLI tools的使用较为简单,直接使用TI已提供的软件包即可实现高占空比的FMCW波形配置,也可实现点频模式的配置,下文将要介绍了操作步骤。
连续波点频****模式
烧写bin文件bin到板卡
修改串口号".\studio_cli\gui\mmw_cli_tool\mmwaveconfig.txt"
修改cfg文件为chirp模式。修改".\studio_cli\gui\mmw_cli_tool\mmwaveconfig.txt"
双击运行".\studio_cli\gui\mmw_cli_tool\mmwave_studio_cli.exe" 即可按设定的FMCW chirp模式****。
设置为其他频段,请修改".\studio_cli\profile_chirp_mode_xwr68xx.cfg"。
COM_PORT_NUM=9 修改为Application/User口(命令口),需注意,这个串口跑的是921600bps
CONFIG_JSON_CFG_PATH=..\..\profile_continuous_mode_xwr68xx.cfg #连续波模式
CONFIG_JSON_CFG_PATH=..\..\profile_chirp_mode_xwr68xx.cfg # FMCW chirp模式
profileCfg 0 60.75 30.00 25.00 59.10 0 0 54.71 1 96 2950.00 2 1 36
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
chirpCfg 2 2 0 0 0 0 0 4
frameCfg 0 2 96 0 26 1 0
其中framecfg中的26可以修改,比如26ms对应7%占空比。70ms对应36.66%占空比。
contModeCfg 61 0 0 6000 0 0 30 0 1024
contModeCfg 60 0 0 6000 0 0 30 0 1024
61/60即是****连续波时候的频点。
CONFIG_JSON_CFG_PATH=..\..\profile_continuous_mode_xwr68xx.cfg #连续波模式
CONFIG_JSON_CFG_PATH=..\..\profile_chirp_mode_xwr68xx.cfg #FMCW chirp模式
COM_PORT_NUM=9 修改为Application/User口(命令口),需注意,这个串口跑的是921600bps
烧写bin文件bin到板卡
修改串口号". \studio_cli\gui\mmw_cli_tool\mmwaveconfig.txt"
修改cfg文件为CW模式。修改".\studio_cli\gui\mmw_cli_tool\mmwaveconfig.txt"
双击运行".\studio_cli\gui\mmw_cli_tool\mmwave_studio_cli.exe"即可按点频连续波****。
设置为其他频点。修改".\studio_cli\profile_continuous_mode_xwr68xx.cfg"
FMCW chirp扫频****模式
小结,使用DCA1000+mmWave Studio CLI tools软件组合的软硬件要求及优势如下:
硬件:mmWave radar sensor EVM + DCA1000 + PC
软件:mmWave studio CLI tools
Radar硬件所需预留接口:LVDS(ADC数据传输) + UART(RF参数配置及固件加载)+ SOP(SOC启动模式配置,仅需配置一次)
优势:支持FMCW模式及连续波点频模式,获取ADC数据则需DCA1000EVM数据采集卡的配合,若只需评估TX性能,可以只使用SOC板卡,不需要DCA1000EVM。
3. 使用mmWave SDK out-of-box demo的连续波(点频)模式配置方法
3.1. 运行mmWave SDK out-of-box demo的对外接口说明
在现有的TI mmWave SDK及TOOLBOX相关的示例代码中,均使用两个串口进行参数的配置及数据的获取,EVM板载的TM4C MCU是一个板载XDS110仿真器,仿真器自带两路串口,可以直接完成SDK DEMO中的参数配置及数据输出。在客制化产品中,可以使用外部的2个USB<->UART桥接线缆进行调试,两个串口的默认使用情况如下:

图4. 运行mmWave SDK out-of-box demo的对外接口框图
配置命令口:Application/User Uart: Configuration port 115200bps: UART_RX/TX port <-> USB-UART cable <-> PC
数据口:Auxilliary Data Port: Data port 921600bps: MSS_LOGGER-> USB-UART cable -> PC
3.2. 在mmWave SDK out-of-box demo中增加连续波CW模式配置代码
在现有的TI mmWave SDK及TOOLBOX相关的示例代码中,增加配置连续波点频的函数,完成对连续波模式的配置及单次自校准,通过原有的CLI串口调试接口,将连续波模式的CFG参数以CLI的格式配置进去,即可完成连续波点频模式的配置,该配置实现代码较为简单,可作为应用程序的一部分与应用程序整合,实现代码如下:
在c 增加头文件
#include <ti/utils/cli/include/cli_internal.h>
在c 增加一条新的CLI指令
cliCfg.tableEntry[cnt].cmd = "ContMode";
cliCfg.tableEntry[cnt].helpString = "<Freq>";
cliCfg.tableEntry[cnt].cmdHandlerFxn = MmwDemo_CLIContMode;
cnt++;
在c 增加以下代码
#define ROUND_TO_INT32(X) ((int32_t) (X))
//#define CONV_FREQ_GHZ_TO_CODEWORD(X) (uint32_t) ((float)X * (1e9) / 53.644)//77G device
#define CONV_FREQ_GHZ_TO_CODEWORD(X) (uint32_t) ((float)X * (1e9) / 40.233)//60G device
static int32_t MmwDemo_CLIContMode (int32_t argc, char* argv[])
{
int32_t retVal;
float nFreqCent;
rlContModeCfg_t contModeCfg;
rlContModeEn_t contModeEnable;
if (argc != 2)
{
CLI_write ("Error: Invalid usage of basicCfg command\n");
return -1;
}
nFreqCent = atof(argv[1]);
contModeCfg.startFreqConst = (CONV_FREQ_GHZ_TO_CODEWORD(nFreqCent));
contModeCfg.txOutPowerBackoffCode = 0;
contModeCfg.txPhaseShifter = 0;
contModeCfg.digOutSampleRate = 6000;
contModeCfg.hpfCornerFreq1 = 0;
contModeCfg.hpfCornerFreq2 = 0;
contModeCfg.rxGain = 30;
// b0 FORCE_VCO_SEL
// 0 - Use internal VCO selection
// 1 - Forced external VCO selection
// b1 VCO_SEL
// 0 - VCO1 (77G:76 - 78 GHz or 60G:57 - 60.75 GHz)
// 1 - VCO2 (77G:77 - 81 GHz or 60G:60 - 64 GHz)
// //77G device
// if (nFreqCent > 78)
// contModeCfg.vcoSelect = 0x2;
// else
// contModeCfg.vcoSelect = 0x0;
//60G device
contModeCfg.vcoSelect = 0x2;
CLI_write ("CONT_FREQ_CONST=%X,%D\n",contModeCfg.startFreqConst,contModeCfg.startFreqConst);
contModeEnable.contModeEn = 1;
retVal = rlSetContModeConfig(RL_DEVICE_MAP_INTERNAL_BSS, (rlContModeCfg_t*)&contModeCfg);
/* Check for mmWaveLink API call status */
if(retVal != 0)
{
System_printf("Error: rlSetContModeConfig retVal=%d\n", retVal);
return -1;
}
System_printf("Debug: Finished rlSetContModeConfig\n");
int32_t errCode;
MMWave_CalibrationCfg calibrationCfg;
MMWave_ErrorLevel errorLevel;
int16_t mmWaveErrorCode;
int16_t subsysErrorCode;
/* Get the open configuration from the CLI mmWave Extension */
CLI_getMMWaveExtensionOpenConfig (&gMmwMCB.cfg.openCfg);
/* NO: Setup the calibration frequency: */
gMmwMCB.cfg.openCfg.freqLimitLow = 600U;
gMmwMCB.cfg.openCfg.freqLimitHigh = 640U;
// gMmwMssMCB.cfg.openCfg.freqLimitLow = 760U;
// gMmwMssMCB.cfg.openCfg.freqLimitHigh = 810U;
gMmwMCB.cfg.ctrlCfg.dfeDataOutputMode = MMWave_DFEDataOutputMode_CONTINUOUS;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.startFreqConst = contModeCfg.startFreqConst;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.txOutPowerBackoffCode = contModeCfg.txOutPowerBackoffCode;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.txPhaseShifter = contModeCfg.txPhaseShifter;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.digOutSampleRate = contModeCfg.digOutSampleRate;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.hpfCornerFreq1 = contModeCfg.hpfCornerFreq1;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.hpfCornerFreq2 = contModeCfg.hpfCornerFreq2;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.rxGain = contModeCfg.rxGain;
gMmwMCB.cfg.ctrlCfg.u.continuousModeCfg.cfg.vcoSelect = contModeCfg.vcoSelect;
/* Disable the frame start async event so that small chirp times
are supported. If this event is enabled it will break real-time
for small chirp times and cause 1D processing to crash
due to lack of MIPS*/
gMmwMCB.cfg.openCfg.disableFrameStartAsyncEvent = true;
/* Enable frame stop async event so that we know when BSS has stopped*/
gMmwMCB.cfg.openCfg.disableFrameStopAsyncEvent = false;
/* No custom calibration: */
gMmwMCB.cfg.openCfg.useCustomCalibration = false;
gMmwMCB.cfg.openCfg.customCalibrationEnableMask = 0x0;
/* calibration monitoring base time unit
* setting it to one frame duration as the demo doesnt support any
* monitoring related functionality
*/
gMmwMCB.cfg.openCfg.calibMonTimeUnit = 1;
/* Open the mmWave module: */
if (MMWave_open (gMmwMCB.ctrlHandle, &gMmwMCB.cfg.openCfg, NULL, &errCode) < 0)
{
/* Error: decode and Report the error */
MMWave_decodeError (errCode, &errorLevel, &mmWaveErrorCode, &subsysErrorCode);
CLI_write ("Error: mmWave Open failed [Error code: %d Subsystem: %d]\n",
mmWaveErrorCode, subsysErrorCode);
return -1;
}
CLI_write ("MMWave_open\n");
/* Configure the mmWave module: */
if (MMWave_config (gMmwMCB.ctrlHandle, &gMmwMCB.cfg.ctrlCfg, &errCode) < 0)
{
CLI_write ("Error: MMWDemoMSS mmWave Configuration failed [Error code %d]\n", errCode);
MMWave_decodeError (errCode, &errorLevel, &mmWaveErrorCode, &subsysErrorCode);
CLI_write ("Error: MMWDemoMSS mmWave Configuration failed [mmWave Error: %d Subsys: %d]\n", mmWaveErrorCode, subsysErrorCode);
return -1;
}
CLI_write ("MMWave_config\n");
/* Initialize the calibration configuration: */
memset ((void*)&calibrationCfg, 0, sizeof(MMWave_CalibrationCfg));
// /* Populate the calibration configuration: */
// calibrationCfg.dfeDataOutputMode =
// gMmwMssMCB.cfg.ctrlCfg.dfeDataOutputMode;
// calibrationCfg.u.chirpCalibrationCfg.enableCalibration = true;
// calibrationCfg.u.chirpCalibrationCfg.enablePeriodicity = true;
// calibrationCfg.u.chirpCalibrationCfg.periodicTimeInFrames = 10U;
calibrationCfg.dfeDataOutputMode = gMmwMCB.cfg.ctrlCfg.dfeDataOutputMode;
calibrationCfg.u.contCalibrationCfg.enableOneShotCalibration = true;
/* Start the mmWave module: The configuration has been applied successfully. */
if (MMWave_start (gMmwMCB.ctrlHandle, &calibrationCfg, &errCode) < 0)
{
/* Error: Unable to start the mmWave control */
MMWave_decodeError (errCode, &errorLevel, &mmWaveErrorCode, &subsysErrorCode);
CLI_write ("Error: MMWDemoMSS mmWave Start failed [Error code %x]\n", errCode);
CLI_write ("Error: MMWDemoMSS mmWave Stop failed [mmWave Error: %d Subsys: %d]\n", mmWaveErrorCode, subsysErrorCode);
return -1;
}
CLI_write ("Debug: MMWDemoMSS mmWave Start succeeded \n");
retVal = rlEnableContMode(RL_DEVICE_MAP_INTERNAL_BSS, (rlContModeEn_t*)&contModeEnable);
/* Check for mmWaveLink API call status */
if(retVal != 0)
{
/* Error: Link reported an issue. */
CLI_write("Error: rlEnableContMode retVal=%d\n", retVal);
return -1;
}
CLI_write("Debug: Finished rlEnableContMode\n");
/* Package the command with given data and send it to device */
return 0;
}
cfg的配置信息如下:
flushCfg
dfeDataOutputMode 2
channelCfg 2 1 0
adcCfg 2 2
adcbufCfg -1 0 0 1 1
lowPower 0 0
ContMode 60
ContMode 60
3.3. 运行测试代码
将上述代码集成进测试程序后,编译成功后,将此BIN文件烧写到EVM板卡中,通过CLI串口加载配置,即可实现连续波点频模式的配置,串口打印信息如下,完成连续波点频模式的配置。
******************************************
xWR64xx MMW Demo 03.05.00.04
******************************************
mmwDemo:/>flushCfg
Done
mmwDemo:/>dfeDataOutputMode 2
Done
mmwDemo:/>channelCfg 2 1 0
Done
mmwDemo:/>adcCfg 2 2
Done
mmwDemo:/>adcbufCfg -1 0 0 1 1
Done
mmwDemo:/>lowPower 0 0
Done
mmwDemo:/>ContMode 60
CONT_FREQ_CONST=58E3A1CD,
Debug: Init Calibration Status = 0x1ffe
MMWave_open
MMWave_config
Debug: MMWDemoMSS mmWave Start succeeded
Debug: Finished rlEnableContMode
Done
小结,使用mmWave SDK out-of-box demo的连续波(点频)模式配置的软件组合的软硬件要求及优势如下:
硬件:mmWave radar sensor EVM + PC
软件:mmWave SDK out-of-box demo + 代码修改
Radar硬件所需预留接口:UART(RF参数配置及固件加载)+ SOP(SOC启动模式配置,仅需配置一次)
优势:与应用代码整合,可以灵活的通过配置函数切换FMCW模式及点频模式,获取ADC数据则用户自己完成ADCBUF取数的驱动代码修改,若只用于评估TX性能,那此方法则不需要更多的修改,即可在应用代码中预留此接口,方便研发测试及产线测试。
4. 总结
本文介绍了3种连续波点频模式设置的软件工具及方法,用户可以根据实际的使用需求,在早期研发阶段,用灵活的mmWave studio软件配置RF参数,测试RF性能,在后期量产阶段,用代码固化的方式增加连续波模式的配置选项,方便测试雷达的点频性能及天线方向图等。需注意的是,在配置连续波模式后,SOC的温度较高,需要做好散热措施保证芯片工作温度在数据手册允许范围内。另外,本文介绍的方式全部都使用mmWave link API实现,如客户需要修改其中的部分配置,请参考mmWave dfp内的API文档。
5. 参考资料
IWR6843、IWR6443 单芯片 60GHz 至 64GHz 毫米波传感器 数据表 (Rev. D)
IWR14xx/16xx/18xx/68xx/64xx Industrial Radar Family Technical Reference Manual: https://www.ti.com.cn/cn/lit/pdf/swru522
DCA1000EVM Data Capture Card User's Guide (Rev. A): https://www.ti.com.cn/cn/lit/pdf/spruij4
mmWave Radar Interface Control document:
C:\ti\mmwave_dfp_01_02_06_03\docs\mmWave-Radar-Interface-Control.pdf
https://www.ti.com.cn/tool/cn/MMWAVE-DFP
mmWave SDK: mmWave Software Development Kit
http://www.ti.com/tool/mmwave-sdk
mmWave SDK User’s Guide: C:\ti\mmwave_sdk_03_05_00_04\docs\mmwave_sdk_user_guide.pdf
mmWave SDK Out of Box Demo - XWR68XX: C:/ti/mmwave_sdk_03_05_00_04/packages/ti/demo/xwr68xx/mmw/docs/doxygen/html/index.html
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

