
CAN总线一体化步进控制方案助您简化设备控制系统的实施
设备越来越复杂,自动化程度越来越高,设备体积要求越来越小,定位精度更高、设备更新快,成本控制等一系列新的需求提出,众多设备制造商对控制系统提出了更高的要求。
借助优爱宝机器人一体化的CAN总线控制网络,机器制造商现在可轻松搭建自己需要的自动化设备,并实现持续性的更新,运动控制正在迈入“模块化的PC机时代”。
传统运动控制的问题
就传统运动控制而言,往往基于专用控制器、运动控制模块、运动控制卡,这些带来以下问题:
(1)受到轴数限制
由于传统PLC连接的运动控制单个控制模块支持有限轴数,而且总线在轴多时会同步性能大幅度降低,即使采用现有的通信,但其软件架构却仍然是制约的瓶颈。
(2)需要多个开发环境,费时费力
为搭建一套系统,往往需要多个厂商的产品,其编程软件、风格、项目管理均需不同的学习,而且,是否能够互通使得各个组件性能得到最佳发挥—几乎不大可能。整套系统的搭建对研发提出了很高的要求,时效上无法很好的满足。
(3)更新维护麻烦,人力成本高
设备维护往往无法远程控制和实施,需要技术层次较高的人到用户现场进行故障查找和调试,从而提高了设备制造商的人力成本
由于传统的运动控制架构不易于拓展,设备需要更新时,无异于重新开发。
(5)设备体积较大
使用传统的控制系统,设备体积臃肿不堪,众多的线束导致设备内部管理极为不易。
UIROBOT的一体化控制网络
优爱宝公司倡导机器人及自动化系统的模块化设计及制造理念,模块之间采用统一的通信协议,这种机器人积木化的理念为用户提供了前所未有自动化系统设计的人性化和便捷性。
使用优爱宝公司的模块化产品,可以让不熟悉工控系统底层工作原理用户也能在极短的时间内完成设计和产品化。
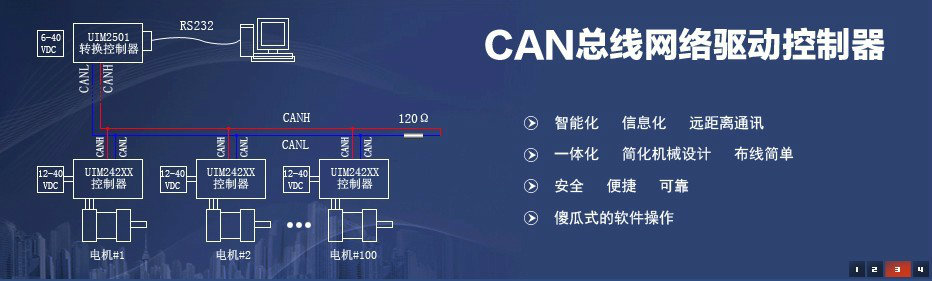
对于优爱宝而言,机器的运动控制被分解为不同运动轴之间的协作,每个轴的控制模块均具备智能,能独立处理局部事务。模块之间采用统一的CAN总线相连,主控机只负责协调流程,和用户界面
无论系统多么复杂,用户仅需关心协调流程和界面,大幅降低了用户的搭建难度。
UIROBOT提供的STEP EVA软件可让用户方便的实现控制系统的操作和调试,完整的SDK库文件支持涵盖VC.C#.VB. LabVIEW等多平台,用户可便捷实施二次开发。
模块化的产品和统一的架构,提升了用户在拓展性和优化升级方面的体验
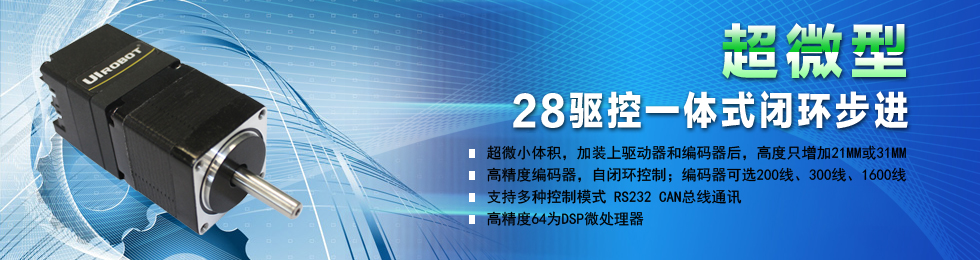
一体化的设计,闭环一体化设计保证伺服般的控制精度、设备体积减小。CAN总线的通信连接,设备内部实现了无板卡化,主网络仅需两根通信线,设备精细化提升

(5) 标准化提升设备可靠性
(6) 远程实施维护,维护难度降低
对于UIROBOT而言,远程维护与诊断、信息化接口满足未来机器的互联与信息化管理需求,维护成本降低
UIROBOT使得开发自主知识产权的机器更为便捷与快速

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

