






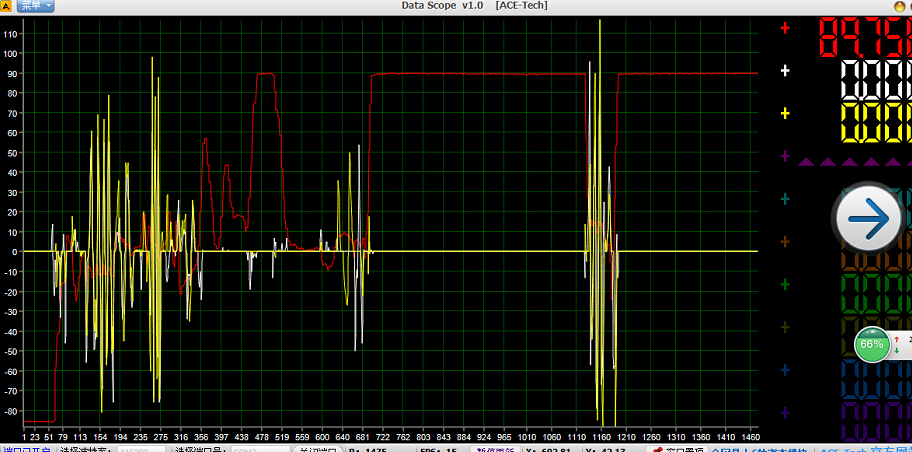
2.实验一:串口连接上位机波形显示
话说一定要仔细阅读说明书啊,弄了半天不显示一度怀疑是USB转TTL模块坏了,最后查看说明书发现做的步骤方法不对,按照说明书一下就好了,可以正常显示平衡车角度、轮速度等参数。
首先,USB转TTL模块杜邦线连接平衡车J3插座,接口定义为GND-GND,PA9-RXD,PA10-TXD
然后,打开平衡车电源开关,注意不要让车平衡,lz就是这里弄错了,双击按键关闭OLED,此步很重要。
接着设置上位机波特率和串口端口号,可在我的电脑里查看端口号,波特率设为115200,打开端口就可以接收到参数了。
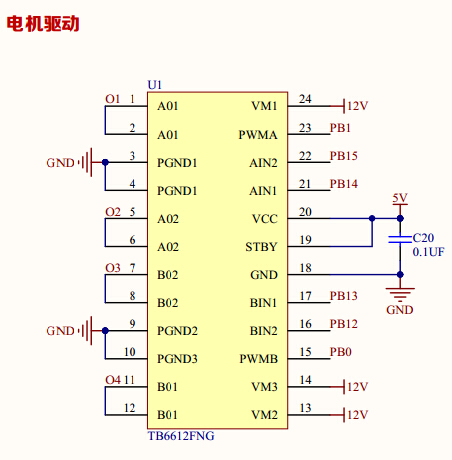
3.实验二:电机驱动实验
距离上次发帖已经过去很长时间,终于又有时间做平衡车。希望可以在活动时间内完成所有实验。加油吧。
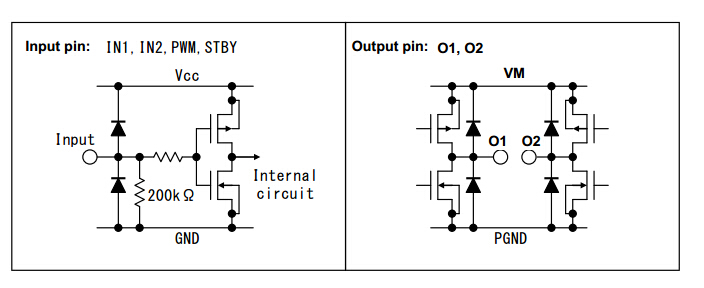
看原理图找到电机驱动部分,东芝官网下载好TB6612芯片手册,在此吐槽下百度竟然没有搜到,这款芯片用的很少吗?最后在东芝官网找到了。
H桥形式驱动电路,原理不复杂,手册查到的真值表。
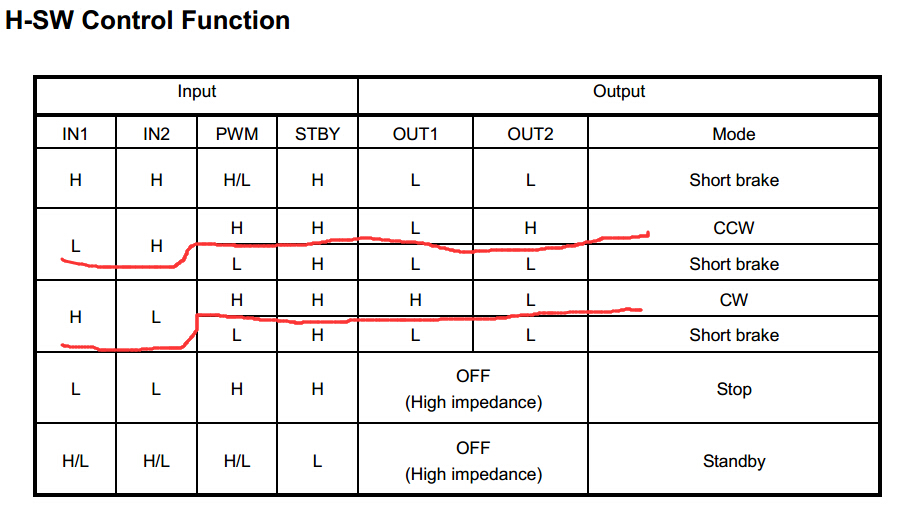
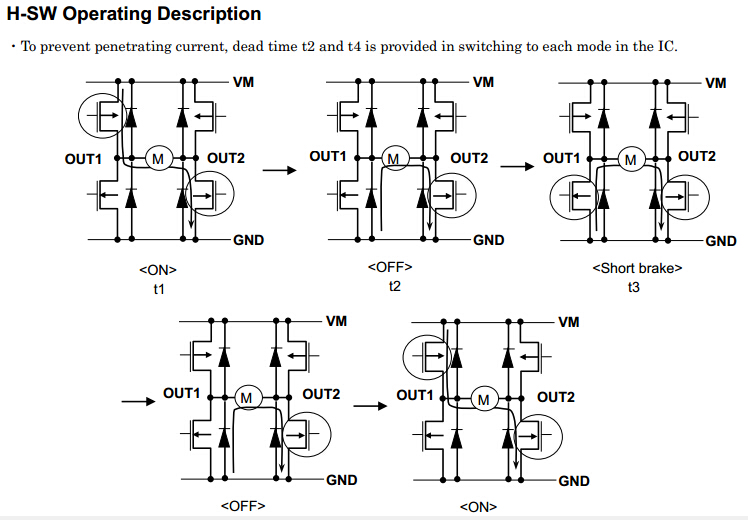
接下来一幅图解释了输出值怎样控制电机转动
更详细点的电路,每路输入信号控制一路输出
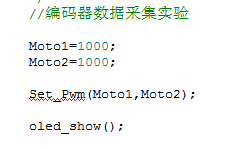
硬件原理明白了,接下来修改程序做最简单的电机驱动,只要电机能转起来就OK。电机驱动函数如下
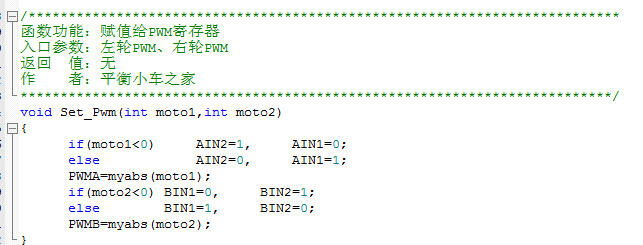
把main函数都注释掉,加上下面的两条语句,其中Moto1,Moto2值范围在-3500~3500之间,正负号控制电机转的方向,值大小控制电机转快慢。OK,电机转起来了。

5.实验四:NRF24L01无线通讯实验
活动快要结束了,把做过的实验传上来。原来用过nrf24l01无线模块,手头正好剩一对,淘宝了stm32f103最小系统板,跟小车用的同一型号芯片,利于编程。
1)硬件连接

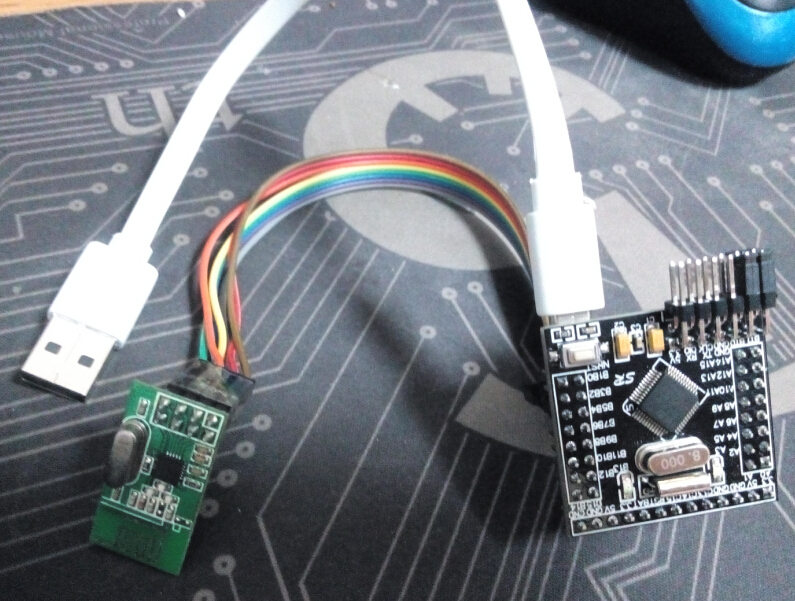
用杜邦线连接好最小系统板和24l01无线模块,参照原理图按照小车的连接顺序连接。
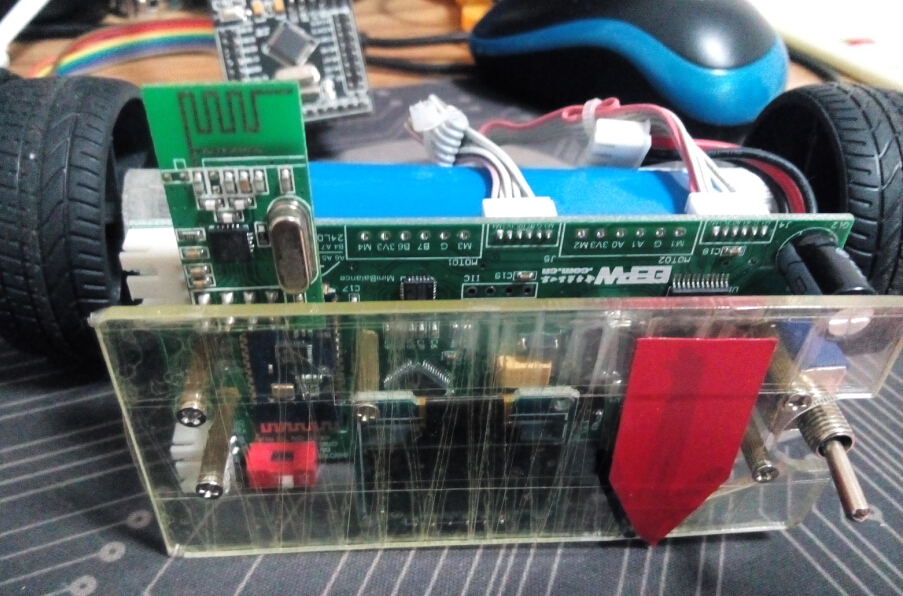
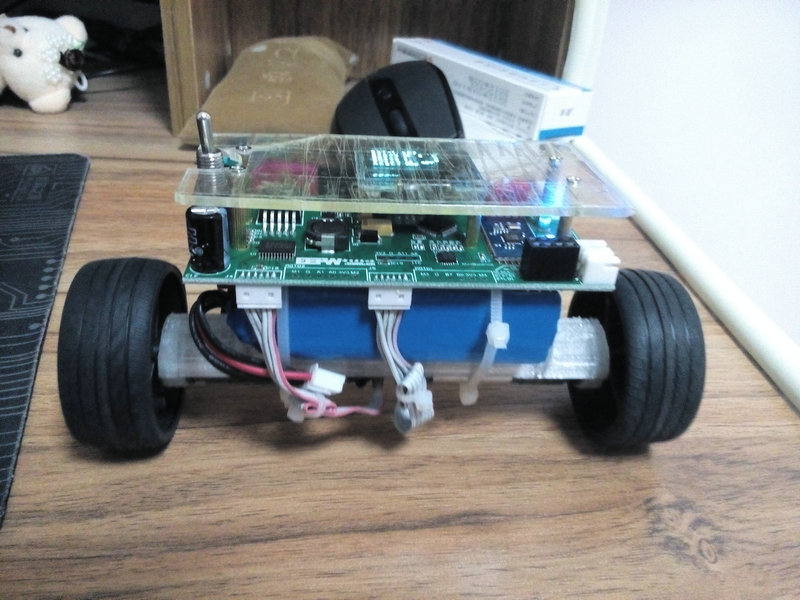
小车安装好无线模块
2)编程
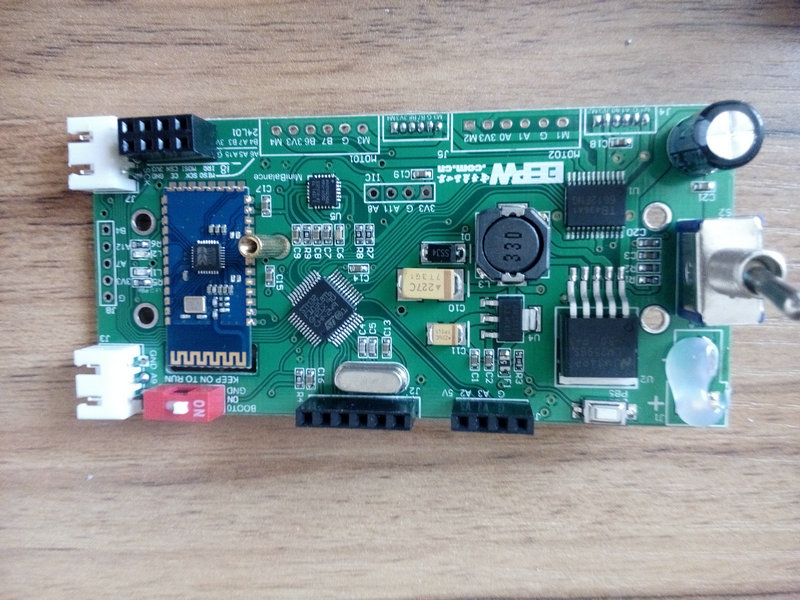
在Mini Balance V2.5 顶配版源码(标准版基础上增加摄像头底层 超声波 NRF24L01)基础上修改程序。
接收端:
NRF24L01_Init(); NRF24L01_FindMyself(); NRF24L01(); 取消注释
NRF24L01()函数中注释掉RX_Mode(); 后的while(1)其余不做修改
发送端:
NRF24L01_Init(); NRF24L01_FindMyself(); 取消注释
main函数中while程序修改为
TX_Mode();
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
tmp_buf[1]=30;
}
delay_ms(10);
其余不要,程序极简,功能为小车上电后向右转圈。
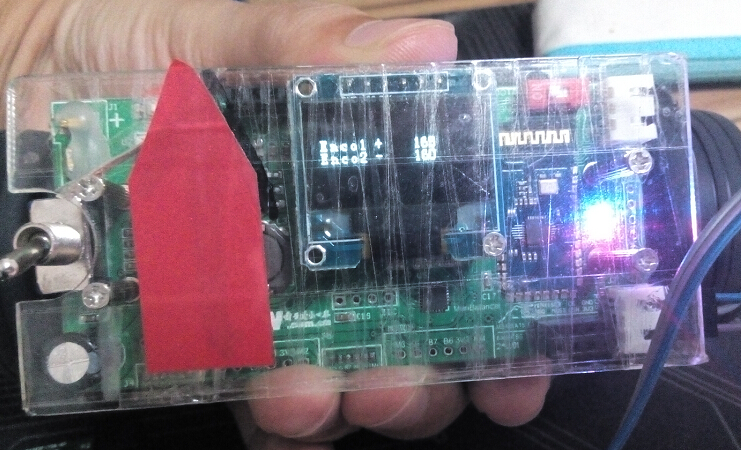
烧程序后小车上电,按S3处于平衡状态,最小系统板上电,小车开始向右转,无线通讯成功。
6.实验五:传感器驱动实验
本节是MPU6050传感器驱动,模块本身不用多介绍了,下面看接线
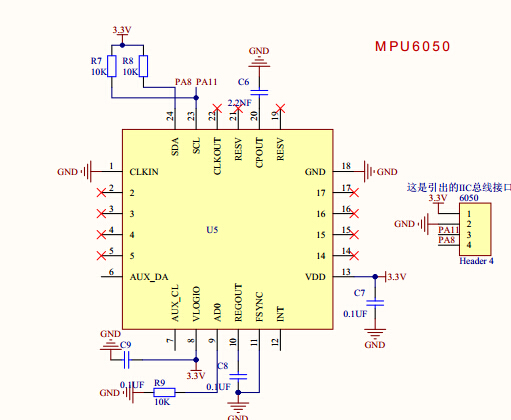
MPU6050通过IIC接口与STM32通讯
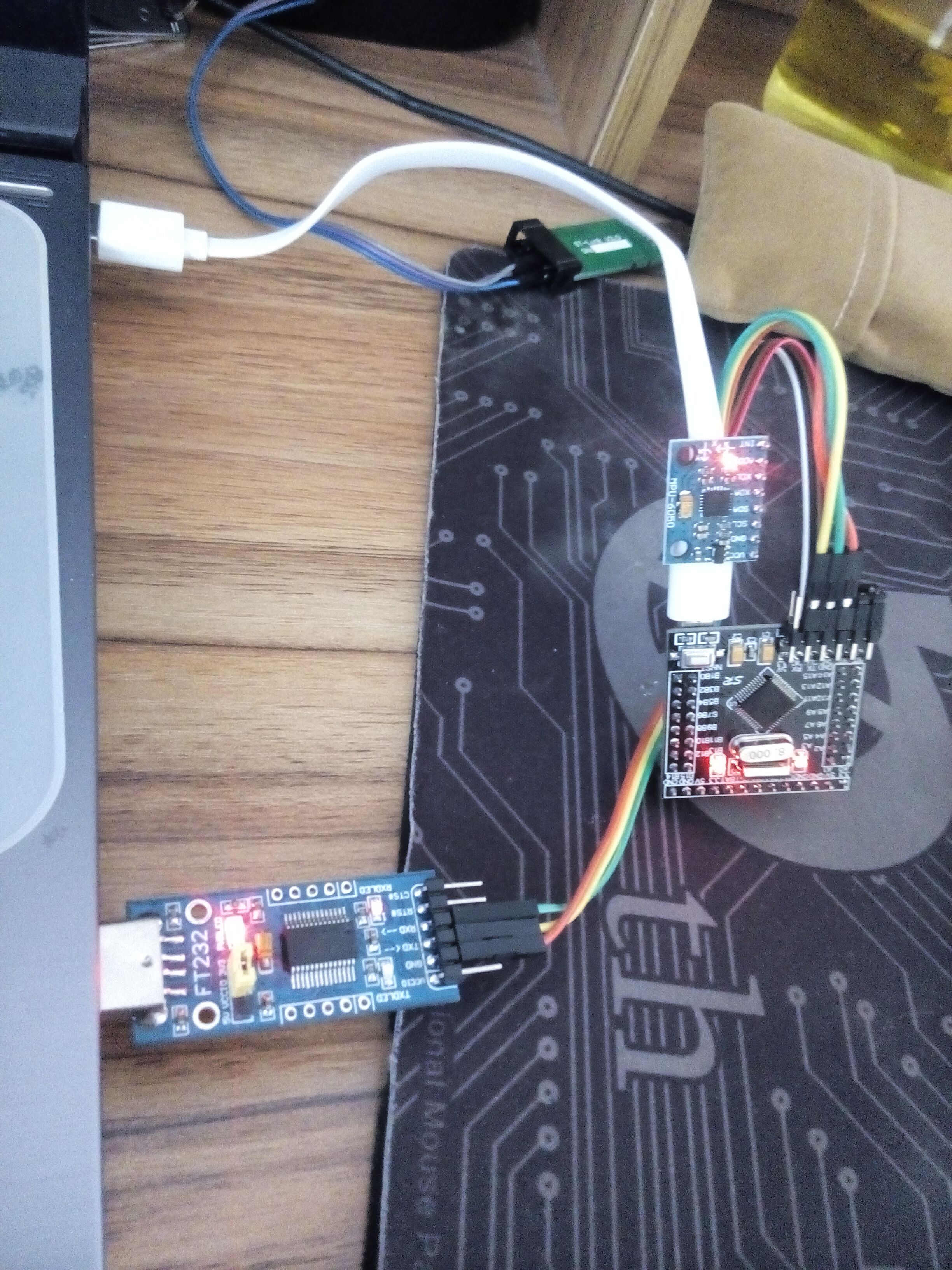
stm32最小系统板和MPU6050模块
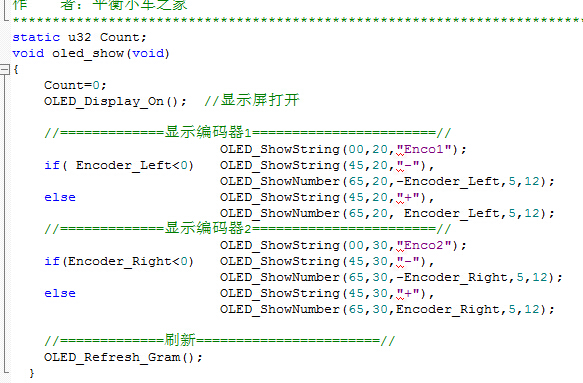
接下来修改程序
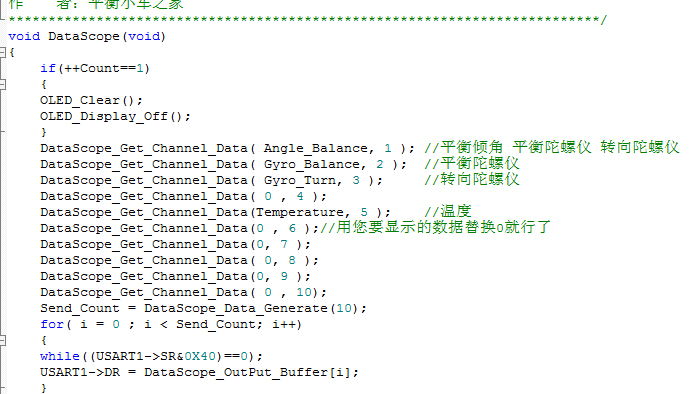
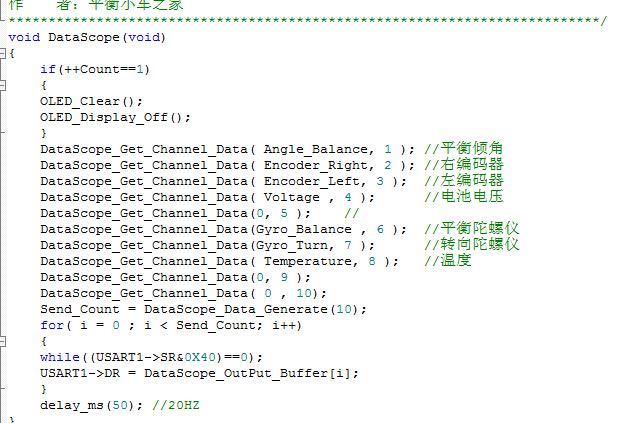
通过上位机显示平衡倾角、平衡陀螺仪、转向陀螺仪、温度这几个参数
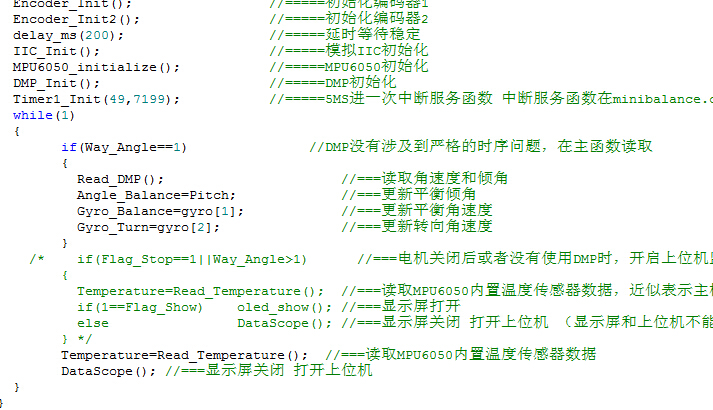
修改main函数,直接打开上位机显示波形。
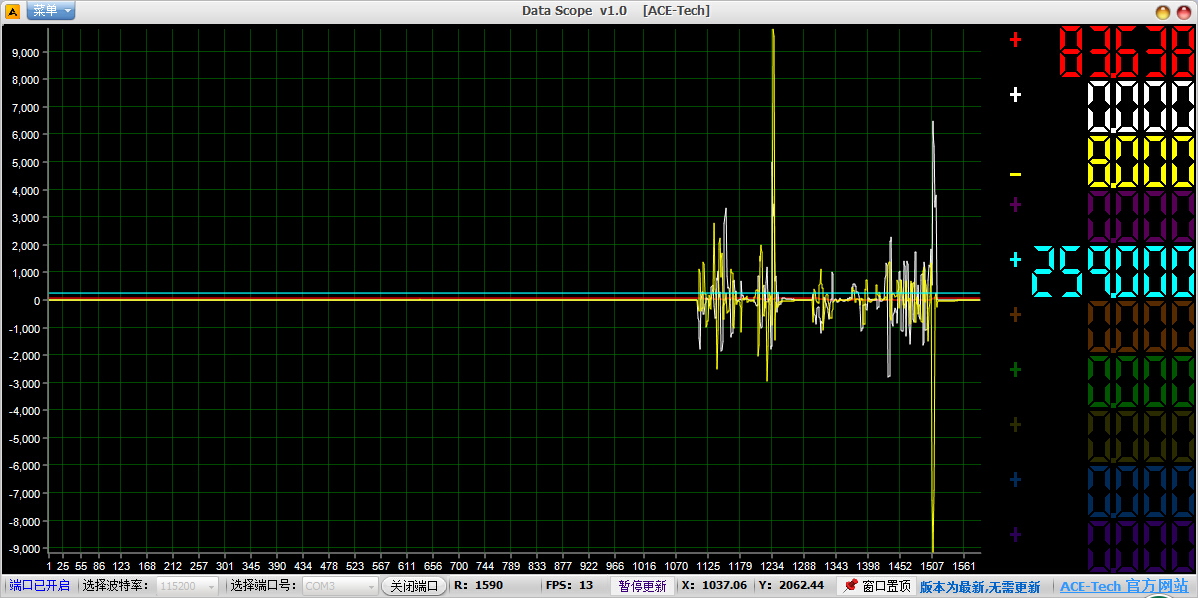
温度显示貌似不准,应该是25.9吧,温度读取程序没有修改
测试视频:
http://v.youku.com/v_show/id_XMTM2NzEyMzI2MA==.html

回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
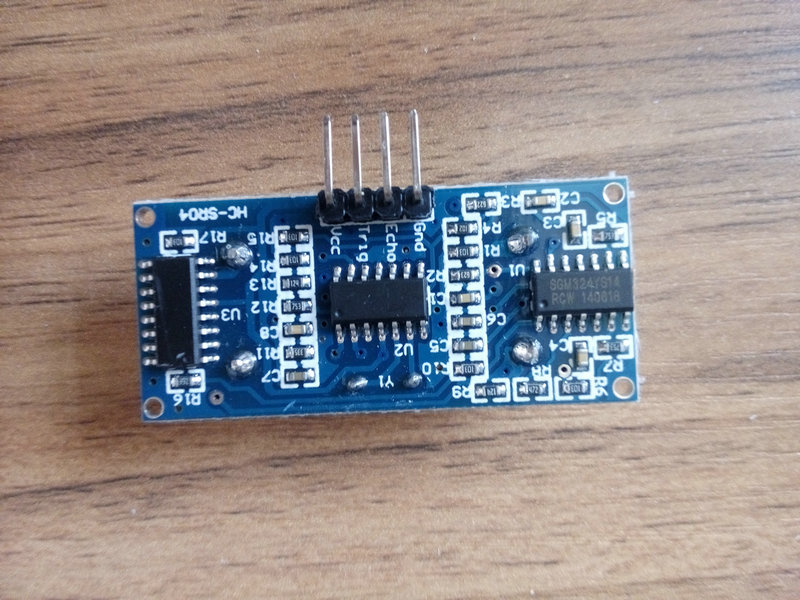
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

