
在日常生活中,我们经常会向产品制造商提供一系列统计数据,这些统计数据充其量只与实际用户的体验有关。
智能手机制造商声称他们的电池使用寿命比实际时间长得多 科技公司将所有产品宣传为最紧凑的版本,汽车公司拥有虚假的燃油经济性数字。
伺服电机制造商也不例外。他们提出了与其电机能够产生的扭矩力量相关的各种声明。

Hitec网站上的HS-422伺服规格。
在这个项目中,我们将构建一个测量标准尺寸伺服系统产生的扭矩范围的工具。
通过这种方式,可以轻松验证特定伺服系统是否会为构建产生必要的扭矩力。
使用称重传感器,Arduino Uno,3D打印框架和其他一些零件,只需将伺服装置安装到位并准确测量它所提供的扭矩力即可。

所需的称重传感器,Arduino Uno,3D打印框架以及此项目所需的其他组件。

顶置摄像头拍摄了该项目所需的组件。

关闭相机拍摄的这个项目所需的组件。
物料Arduino Uno
20kg称重传感器棒
HX711称重传感器放大器分线板
面包板电源
无焊面包板
6英寸跨接线
4x M4热定型刀片
2x M4 x 6mm螺丝
除了上述材料外,您还需要一个爱好大小的伺服器用于测试目的。
如何测量电机伺服的扭矩力通过将力乘以距离来计算扭矩。在这个项目中,获得伺服所施加的力会稍微有点棘手。为此,需要使用称重传感器。
负载单元的设计和使用涉及复杂的细节,但是对于本项目而言,称重传感器是一种传感器,它允许计算机将小的电压变化转换为力。

适用于最高端伺服系统的额定负载为20kg的称重传感器。

在用于隐藏应变仪的称重传感器上发现的白色材料的图像。
使用称重传感器,我们将能够测量伺服的旋转轴和伺服喇叭上的臂之间的精确距离。
请记住,伺服器在尝试旋转时会推动称重传感器。

伺服臂组件。
考虑到来自称重传感器的力测量,以及旋转和伺服臂距离,我们将能够计算出它所传递的扭矩力。
构建测试工具测试工具的机械设计很简单,由两个3D打印部件和一对紧固件组成。
您可以找到本文附带的3D打印部件的设计文件。

模型所需印刷部件的形状。
不需要任何特殊的印刷参数,因此零件的任何硬质塑料都可以。
实际上,由于美学不是此项目的优先考虑因素,因此您可以使用较高的图层高度来加快打印时间。
注意:Monoprice MP Select Mini的层高为0.3mm,可以打印零件。
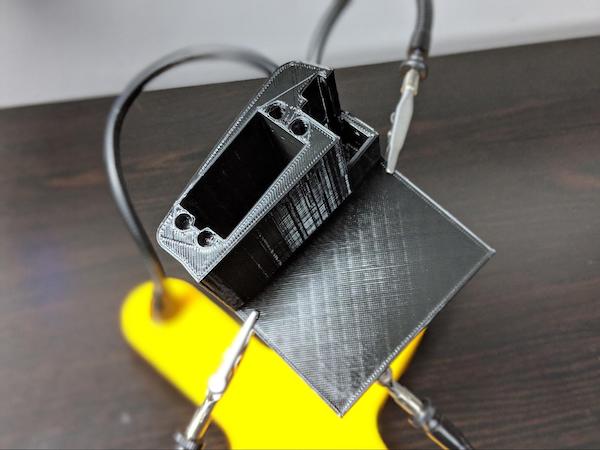
项目印刷部件组装在一起。
请查看下面的视频安装指南,了解有关此步骤的一些额外帮助。
组装测试工具
组装伺服扭矩测量工具的第一步是安装热定位刀片,以便在不损坏3D打印框架的情况下安全地安装伺服系统,然后卸载伺服系统。
要安装热定型刀片,请将每个刀片放在其中一个伺服安装孔上。
使用设定为250°F的烙铁轻轻将插件压入塑料中。
不要将插件推得太硬。让热量为您工作,让插入物沉入塑料中。
当您移除烙铁时,熔融塑料将在插件周围固化,形成非常牢固的粘合。


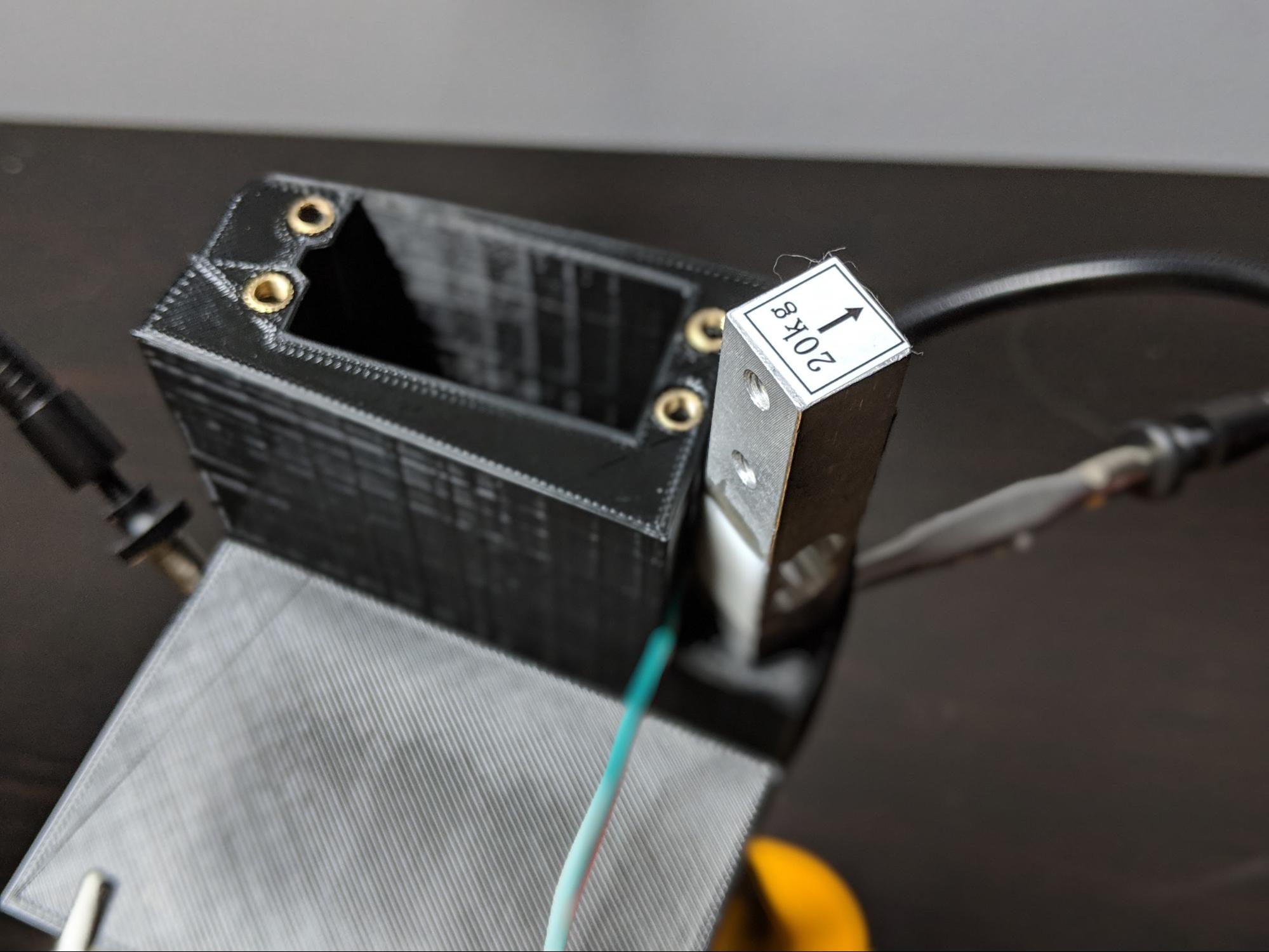
接下来,安装称重传感器,其一侧将有一个绿色箭头。将箭头背向伺服,将其向上转动,然后将称重传感器插入旁边的方形。
称重传感器应紧密配合到位,确保安装中没有任何弯曲会导致力测量误差。

称重传感器加载到伺服系统上。
最后,大面积的平面区域用于面包板。
面包板具有粘性背衬。将其剥离并将面包板粘在3D打印框架上。
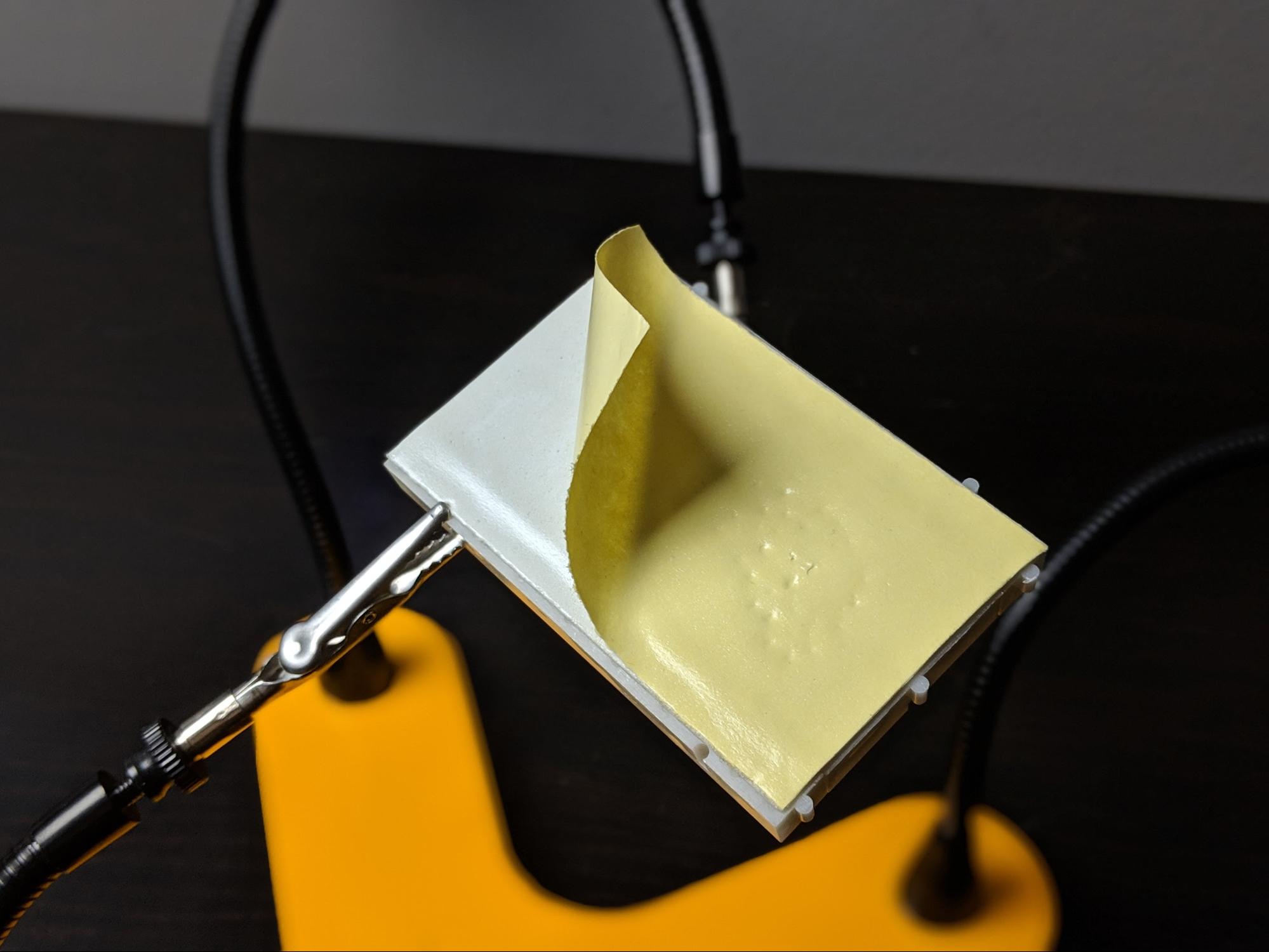
粘合面包板背衬。
面包板连接到伺服和称重传感器。
填充面包板一旦机械设计完成,我们就可以开始研究电路了。
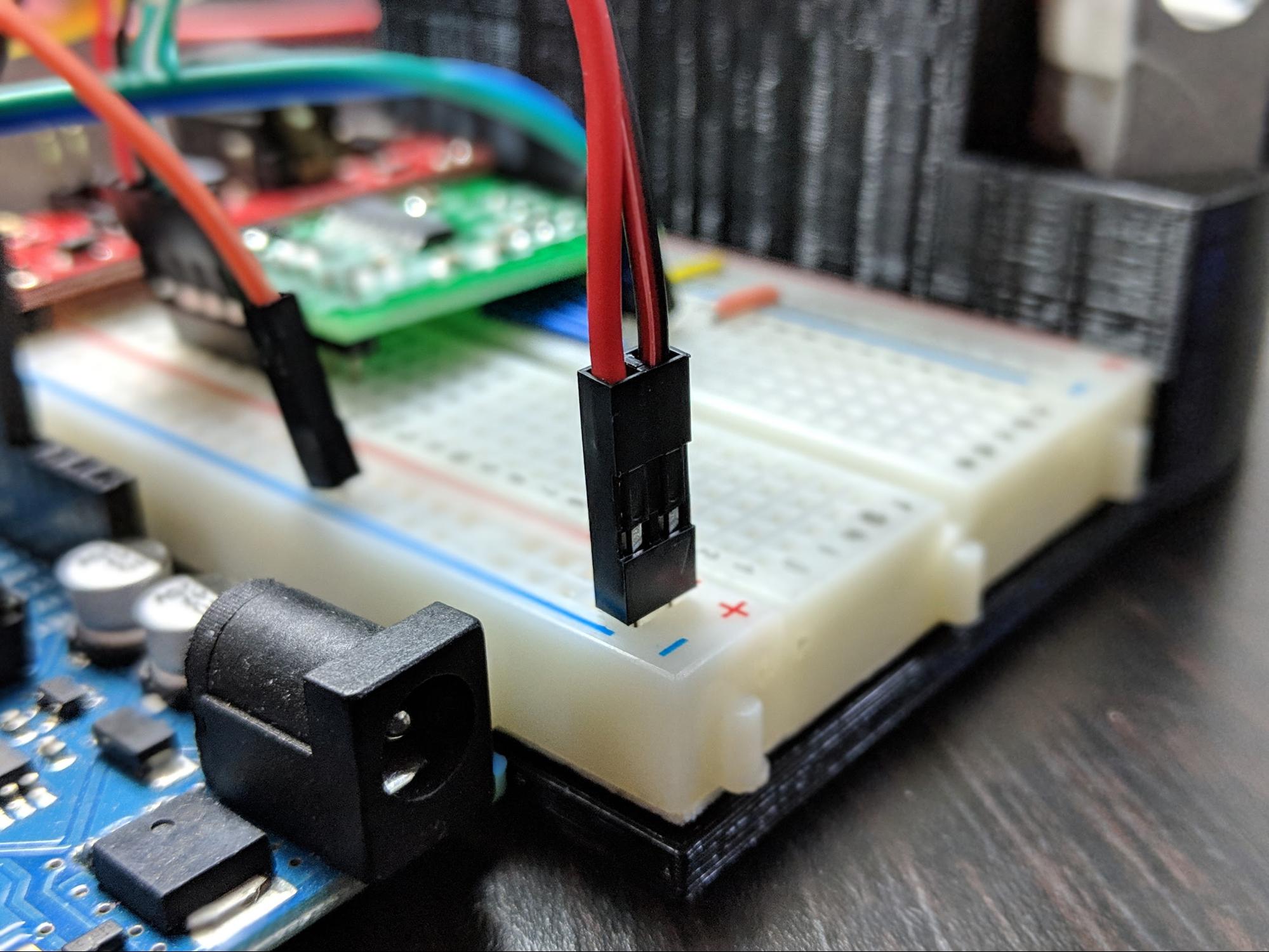
首先,将面包板电源插入面板的与称重传感器同侧的一端。电源横跨面包板,因此电源输出引脚连接到面包板电源轨。
电源开关控制输出电压。
对于这个项目,我们将使用5v。电源上还有一个开/关开关。
现在,请关闭电源。

电源连接到面包板。
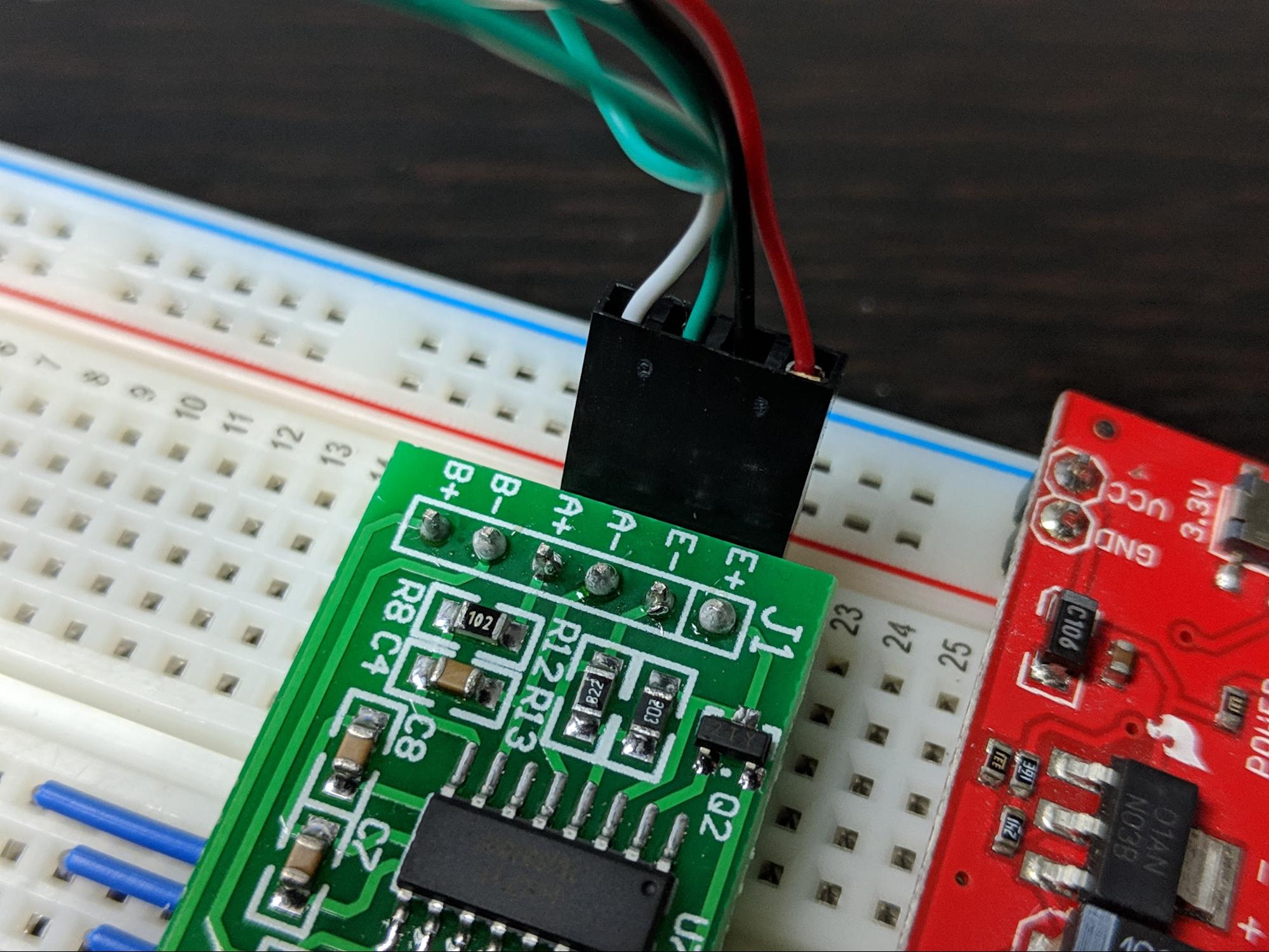
现在,在将HX711添加到面包板之前,应该先做好准备步骤。
我们遇到的问题是HX711板几乎和面包板一样宽。如果HX711ICFANS插入面包板,我们将无法接线。
因此,我们实际上会在HX711之前放置电线。
HX711最靠近伺服的一侧有四个连接。用一小块电线穿过面包板大约五个空间。
当我们将HX711放在电线顶部时,我们仍然可以将其他跳线插入HX711旁边的面包板并访问它的引脚。
要使此步骤更清晰,请查看下面的图像。
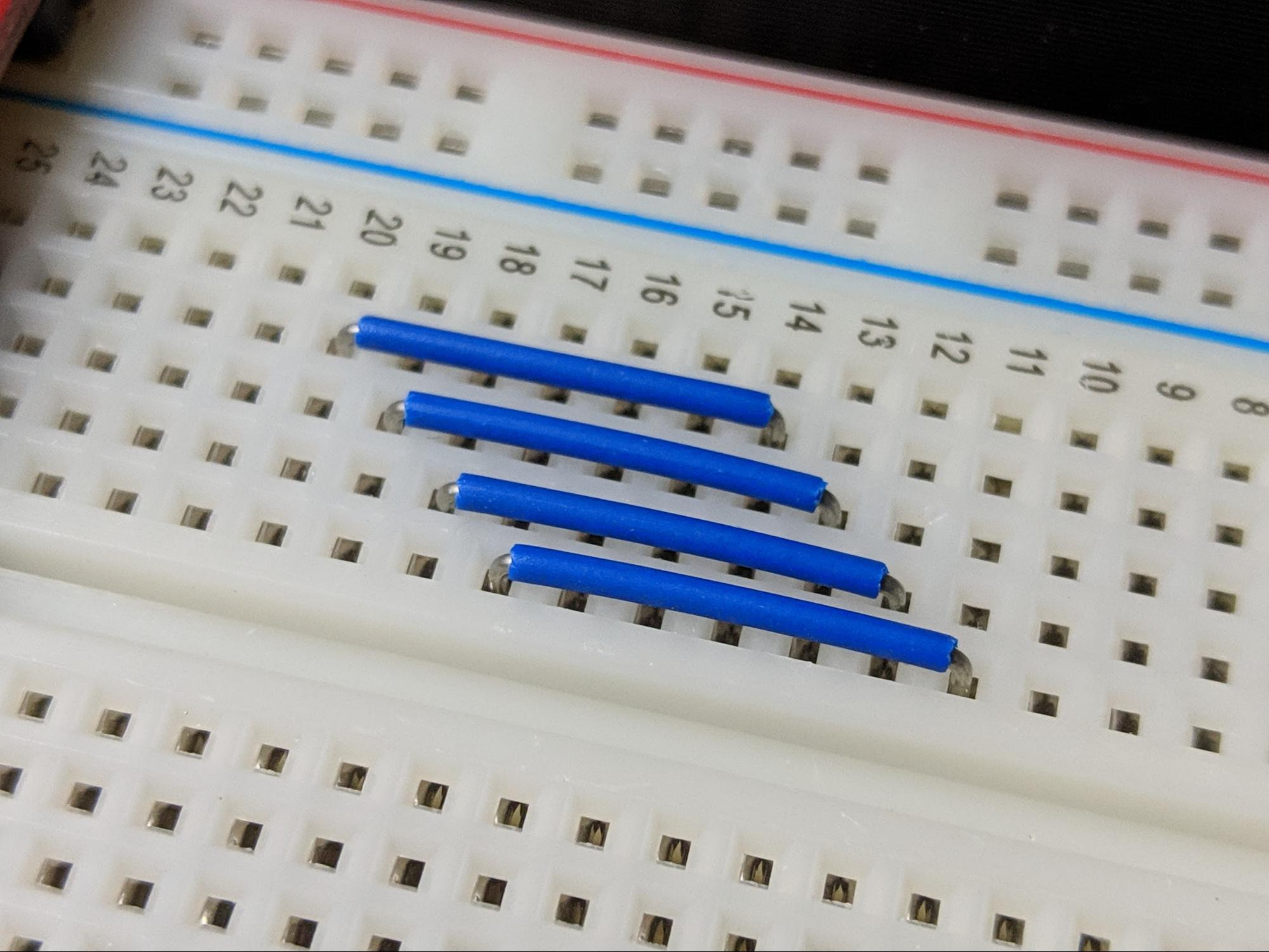
电线附在面包板上。
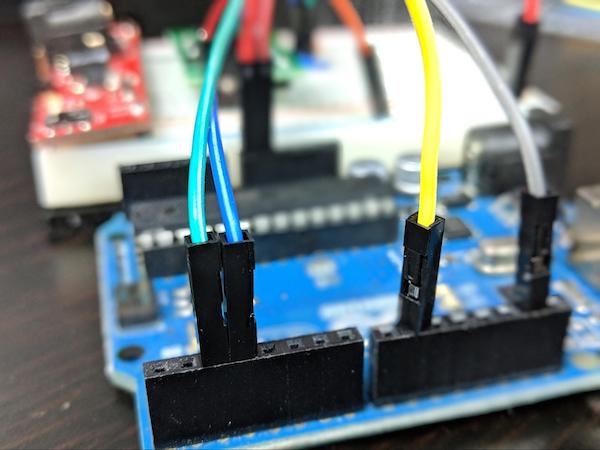
电线就位后,将HX711板插入电源旁边。确保引脚与四根线对齐。

HX711板插入面包板。
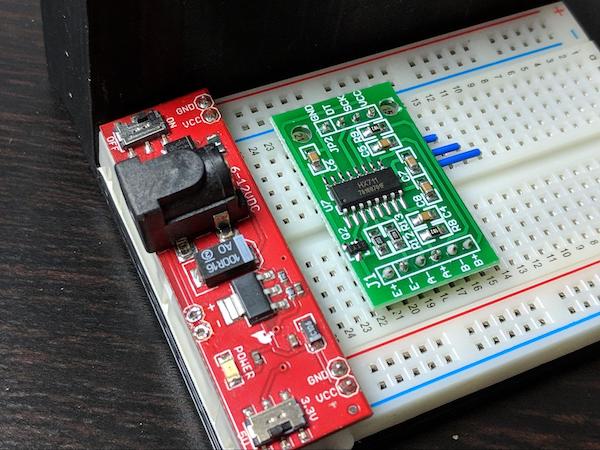
HX711板显示在电源旁边。
最后,Arduino Uno将与扭矩测量工具并排放置。
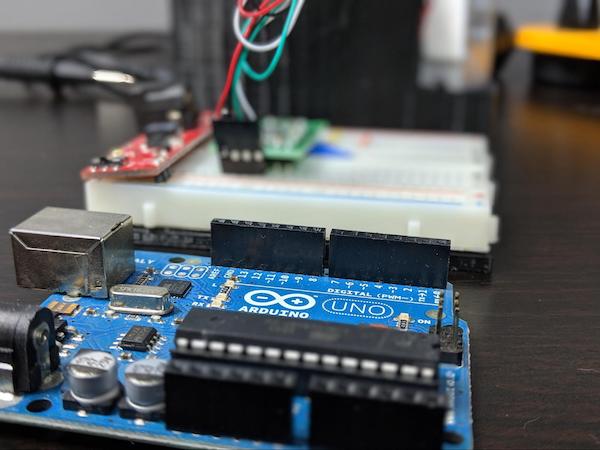
该项目中创建的扭矩测量工具与Arduino相邻。

项目的电路图。



 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

