
PAJ7620U2传感器是一手势传感器,在得捷商城可以很轻松的找到规格书并下载
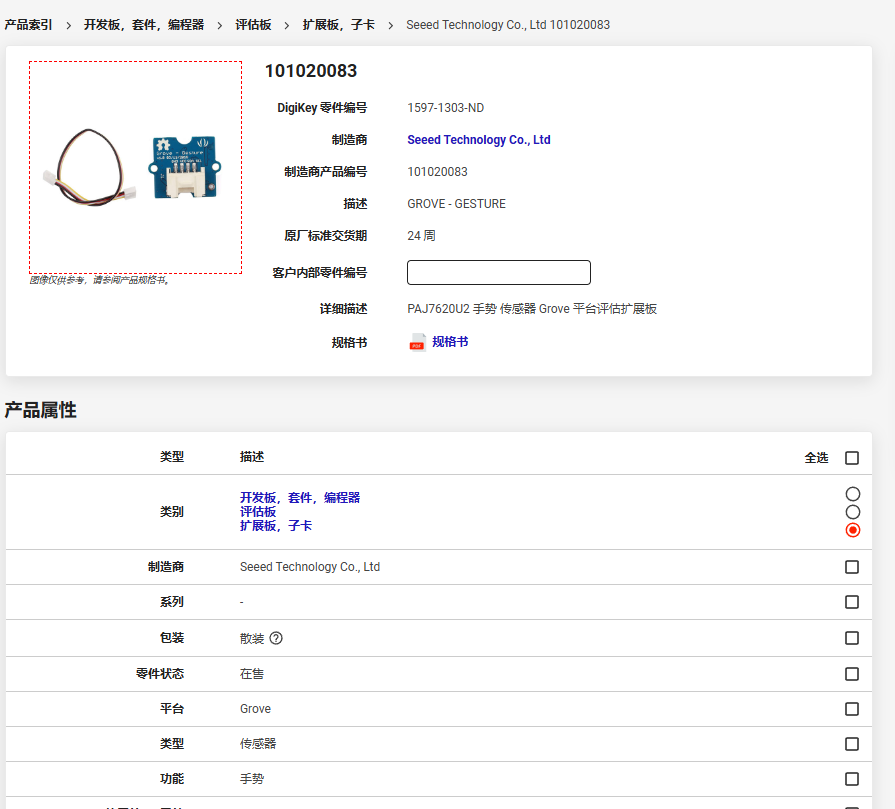
写的也很清楚

能够识别一些简单的手势,上下左右,向前向后,顺时针逆时针等此传感器是IIC接口,STM32H5的板卡上已经引出了相应的端口

根据原理图,我们使用了CN10的 3-5-7-9四个接口,分别是PB6-SCL PB7-SDA AVDD GND,不过模块上是一个2.0的端子接口,这里我直接使用了一个2.54转2.0接口的线,如下
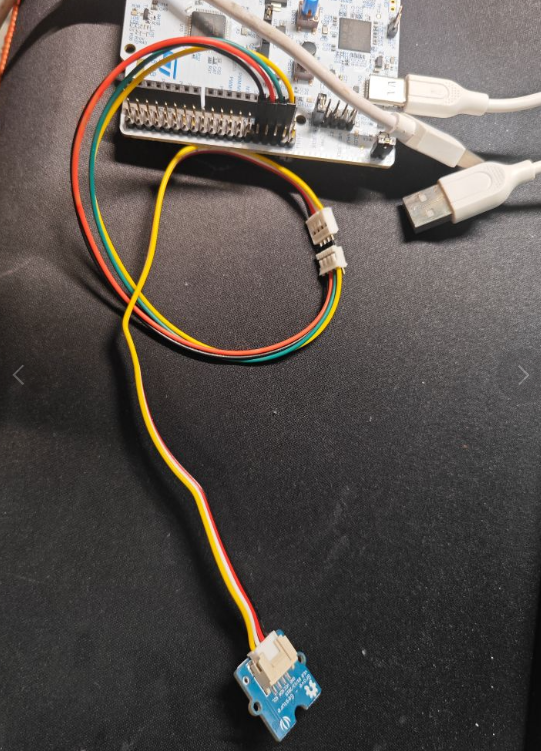
硬件已经连接完成,这里我直接借用了坛友已经成功的驱动,只需要配置对应的IIC接口,添加驱动即可

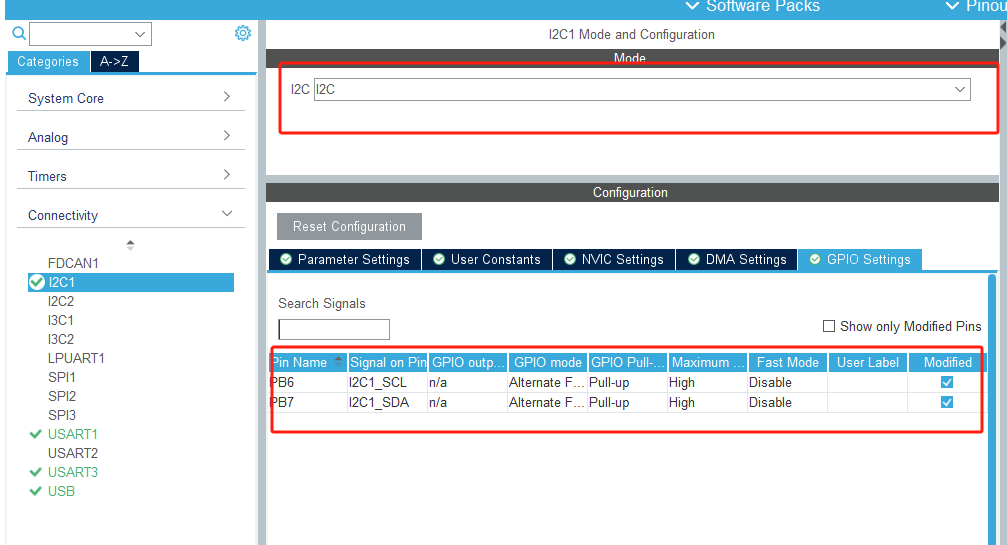
点击生成即可
下边添加驱动
#include "paj7620.h"
#include "stm32h5xx.h" // Device header
#include "i2c.h"
#include "usart.h"
#include "stdio.h"
// PAJ7620初始化寄存器数组:219对 {Address, value}
uint8_t Paj7620Init_Reg_Array[][2] = {
{0xEF, 0x00},
{0x32, 0x29},
{0x33, 0x01},
{0x34, 0x00},
{0x35, 0x01},
{0x36, 0x00},
{0x37, 0x07},
{0x38, 0x17},
{0x39, 0x06},
{0x3A, 0x12},
{0x3F, 0x00},
{0x40, 0x02},
{0x41, 0xFF},
{0x42, 0x01},
{0x46, 0x2D},
{0x47, 0x0F},
{0x48, 0x3C},
{0x49, 0x00},
{0x4A, 0x1E},
{0x4B, 0x00},
{0x4C, 0x20},
{0x4D, 0x00},
{0x4E, 0x1A},
{0x4F, 0x14},
{0x50, 0x00}, // 25
{0x51, 0x10},
{0x52, 0x00},
{0x5C, 0x02},
{0x5D, 0x00},
{0x5E, 0x10},
{0x5F, 0x3F},
{0x60, 0x27},
{0x61, 0x28},
{0x62, 0x00},
{0x63, 0x03},
{0x64, 0xF7},
{0x65, 0x03},
{0x66, 0xD9},
{0x67, 0x03},
{0x68, 0x01},
{0x69, 0xC8},
{0x6A, 0x40},
{0x6D, 0x04},
{0x6E, 0x00},
{0x6F, 0x00},
{0x70, 0x80},
{0x71, 0x00},
{0x72, 0x00},
{0x73, 0x00},
{0x74, 0xF0}, // 50
{0x75, 0x00},
{0x80, 0x42},
{0x81, 0x44},
{0x82, 0x04},
{0x83, 0x20},
{0x84, 0x20},
{0x85, 0x00},
{0x86, 0x10},
{0x87, 0x00},
{0x88, 0x05},
{0x89, 0x18},
{0x8A, 0x10},
{0x8B, 0x01},
{0x8C, 0x37},
{0x8D, 0x00},
{0x8E, 0xF0},
{0x8F, 0x81},
{0x90, 0x06},
{0x91, 0x06},
{0x92, 0x1E},
{0x93, 0x0D},
{0x94, 0x0A},
{0x95, 0x0A},
{0x96, 0x0C},
{0x97, 0x05}, // 75
{0x98, 0x0A},
{0x99, 0x41},
{0x9A, 0x14},
{0x9B, 0x0A},
{0x9C, 0x3F},
{0x9D, 0x33},
{0x9E, 0xAE},
{0x9F, 0xF9},
{0xA0, 0x48},
{0xA1, 0x13},
{0xA2, 0x10},
{0xA3, 0x08},
{0xA4, 0x30},
{0xA5, 0x19},
{0xA6, 0x10},
{0xA7, 0x08},
{0xA8, 0x24},
{0xA9, 0x04},
{0xAA, 0x1E},
{0xAB, 0x1E},
{0xCC, 0x19},
{0xCD, 0x0B},
{0xCE, 0x13},
{0xCF, 0x64},
{0xD0, 0x21}, // 100
{0xD1, 0x0F},
{0xD2, 0x88},
{0xE0, 0x01},
{0xE1, 0x04},
{0xE2, 0x41},
{0xE3, 0xD6},
{0xE4, 0x00},
{0xE5, 0x0C},
{0xE6, 0x0A},
{0xE7, 0x00},
{0xE8, 0x00},
{0xE9, 0x00},
{0xEE, 0x07},
{0xEF, 0x01},
{0x00, 0x1E},
{0x01, 0x1E},
{0x02, 0x0F},
{0x03, 0x10},
{0x04, 0x02},
{0x05, 0x00},
{0x06, 0xB0},
{0x07, 0x04},
{0x08, 0x0D},
{0x09, 0x0E},
{0x0A, 0x9C}, // 125
{0x0B, 0x04},
{0x0C, 0x05},
{0x0D, 0x0F},
{0x0E, 0x02},
{0x0F, 0x12},
{0x10, 0x02},
{0x11, 0x02},
{0x12, 0x00},
{0x13, 0x01},
{0x14, 0x05},
{0x15, 0x07},
{0x16, 0x05},
{0x17, 0x07},
{0x18, 0x01},
{0x19, 0x04},
{0x1A, 0x05},
{0x1B, 0x0C},
{0x1C, 0x2A},
{0x1D, 0x01},
{0x1E, 0x00},
{0x21, 0x00},
{0x22, 0x00},
{0x23, 0x00},
{0x25, 0x01},
{0x26, 0x00}, // 150
{0x27, 0x39},
{0x28, 0x7F},
{0x29, 0x08},
{0x30, 0x03},
{0x31, 0x00},
{0x32, 0x1A},
{0x33, 0x1A},
{0x34, 0x07},
{0x35, 0x07},
{0x36, 0x01},
{0x37, 0xFF},
{0x38, 0x36},
{0x39, 0x07},
{0x3A, 0x00},
{0x3E, 0xFF},
{0x3F, 0x00},
{0x40, 0x77},
{0x41, 0x40},
{0x42, 0x00},
{0x43, 0x30},
{0x44, 0xA0},
{0x45, 0x5C},
{0x46, 0x00},
{0x47, 0x00},
{0x48, 0x58}, // 175
{0x4A, 0x1E},
{0x4B, 0x1E},
{0x4C, 0x00},
{0x4D, 0x00},
{0x4E, 0xA0},
{0x4F, 0x80},
{0x50, 0x00},
{0x51, 0x00},
{0x52, 0x00},
{0x53, 0x00},
{0x54, 0x00},
{0x57, 0x80},
{0x59, 0x10},
{0x5A, 0x08},
{0x5B, 0x94},
{0x5C, 0xE8},
{0x5D, 0x08},
{0x5E, 0x3D},
{0x5F, 0x99},
{0x60, 0x45},
{0x61, 0x40},
{0x63, 0x2D},
{0x64, 0x02},
{0x65, 0x96},
{0x66, 0x00}, // 200
{0x67, 0x97},
{0x68, 0x01},
{0x69, 0xCD},
{0x6A, 0x01},
{0x6B, 0xB0},
{0x6C, 0x04},
{0x6D, 0x2C},
{0x6E, 0x01},
{0x6F, 0x32},
{0x71, 0x00},
{0x72, 0x01},
{0x73, 0x35},
{0x74, 0x00},
{0x75, 0x33},
{0x76, 0x31},
{0x77, 0x01},
{0x7C, 0x84},
{0x7D, 0x03},
{0x7E, 0x01}, // 219
};
// PAJ7620U2初始化,返回0则初始化失败
uint8_t paj7620_init(void)
{
uint8_t i, State, n;
State = 0;
// 写入BANK0区域前, 先向 0xEF 地址写0
while (HAL_OK != HAL_I2C_Mem_Write(&hi2c1, PAJ7620_I2C_ADDRESS, PAJ_BANK_SELECT, I2C_MEMADD_SIZE_8BIT, &State, 1, 500))
{
HAL_Delay(5);
printf("paj7620_init err: 1 \r\n");
}
for (i = 0; i < 219; i++)
{
// 循环向BANK1中写入配置字节,共219字节
while (HAL_OK != HAL_I2C_Mem_Write(&hi2c1, PAJ7620_I2C_ADDRESS, Paj7620Init_Reg_Array[i][0], I2C_MEMADD_SIZE_8BIT, &Paj7620Init_Reg_Array[i][1], 1, 500))
{
HAL_Delay(5);
printf("paj7620_init err: 2 \r\n");
}
HAL_Delay(5);
}
// 读取BANK0区域前, 先向 0xEF 地址写0
while (HAL_OK != HAL_I2C_Mem_Write(&hi2c1, PAJ7620_I2C_ADDRESS, PAJ_BANK_SELECT, I2C_MEMADD_SIZE_8BIT, &State, 1, 500))
{
HAL_Delay(5);
printf("paj7620_init err: 3 \r\n");
}
HAL_Delay(5);
// 读取地址0x32内存的值,存入n中
while (HAL_OK != HAL_I2C_Mem_Read(&hi2c1, PAJ7620_I2C_ADDRESS, 0x32, I2C_MEMADD_SIZE_8BIT, &n, 1, 500))
{
HAL_Delay(5);
printf("paj7620_init err: 4 \r\n");
}
if (n != 0x29)
{
return 0;
}
return 1;
}
// 检测手势并输出
uint16_t getGesture(void)
{
uint8_t Data[2] = {0, 0};
uint16_t Gesture_Data;
HAL_I2C_Mem_Read(&hi2c1, PAJ7620_I2C_ADDRESS, PAJ_INT_FLAG1, I2C_MEMADD_SIZE_8BIT, &Data[0], 1, 500);
HAL_Delay(5);
HAL_I2C_Mem_Read(&hi2c1, PAJ7620_I2C_ADDRESS, PAJ_INT_FLAG2, I2C_MEMADD_SIZE_8BIT, &Data[1], 1, 500);
HAL_Delay(5);
Gesture_Data = (Data[1] << 8) | Data[0];
// printf("\n %x \r\n", Gesture_Data);
return Gesture_Data;
}
void usart_print_gesture(uint16_t status) // 通过串口打印手势信息
{
if (status == PAJ_ZERO) // 未检测到任何手势
{
return;
}
switch (status)
{
case PAJ_UP:
printf("Up\r\n");
break;
case PAJ_DOWN:
printf("Down\r\n");
break;
case PAJ_LEFT:
printf("Left\r\n");
break;
case PAJ_RIGHT:
printf("Right\r\n");
break;
case PAJ_FORWARD:
printf("Forward\r\n");
break;
case PAJ_BACKWARD:
printf("Backward\r\n");
break;
case PAJ_CLOCKWISE:
printf("Clockwise\r\n");
break;
case PAJ_COUNT_CLOCKWISE:
printf("AntiClockwise\r\n");
break;
case PAJ_WAVE:
printf("Wave\r\n");
break;
default:
printf("Error Gesture value ~~~\r\n");
}
}#ifndef __PAJ7620_H__ #define __PAJ7620_H__ #include "stdint.h" //PAJ7620地址寄存器定义 #define PAJ7620_I2C_ADDRESS 0x73<<1 //paj7620的i2c地址,7bit #define PAJ_BANK_SELECT 0xEF //寄存器页选择寄存器:Bank0=0x00, Bank1=0x01 #define PAJ_INT_FLAG1 0x43 //检测结果数据低八位数据所在地址 #define PAJ_INT_FLAG2 0x44 //检测结果数据高八位数据所在地址 //手势状态定义 #define PAJ_ZERO 0x00 //未检测到任何手势 #define PAJ_UP 0x01 //上 #define PAJ_DOWN 0x02 //下 #define PAJ_LEFT 0x04 //左 #define PAJ_RIGHT 0x08 //右 #define PAJ_FORWARD 0x10 //接近 #define PAJ_BACKWARD 0x20 //远离 #define PAJ_CLOCKWISE 0x40 //顺时针旋转 #define PAJ_COUNT_CLOCKWISE 0x80 //逆时针旋转 #define PAJ_WAVE 0x100 //挥动 uint8_t paj7620_init(void); //PAJ7620U2初始化函数 uint16_t getGesture(void); //PAJ7620U2获取手势识别函数 void usart_print_gesture(uint16_t status); //通过串口打印手势信息 #endif
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ICACHE_Init();
MX_USART1_UART_Init();
MX_USART3_UART_Init();
MX_USB_PCD_Init();
MX_I2C1_Init();
/* USER CODE BEGIN 2 */
printf("App Begin\r\n");
paj7620_init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
uint16_t gesture_statu;
while (1)
{
// printf("Blink\r\n");
HAL_GPIO_TogglePin(USER_LED_GPIO_Port, USER_LED_Pin);
HAL_Delay(100);
gesture_statu = getGesture(); // 检测手势
usart_print_gesture(gesture_statu); // 打印手势状态
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
} 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

