
基于红外探测轨迹追踪机器人设计
作者:雨天&MaxChen
简介:整个电路系统分为检测、控制、驱动三个模块
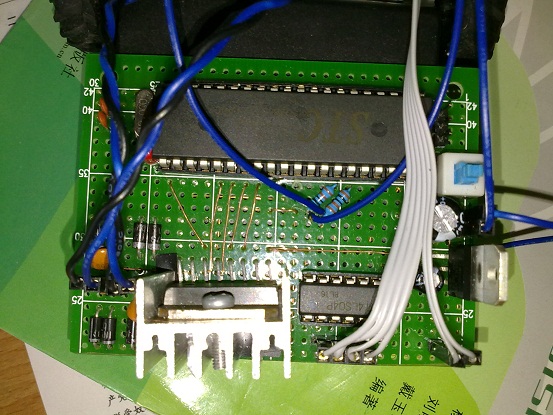
STC89C52单片机作为主控制器,主要用它的P0低四位输入和P2 输出,
这单片机大家都比较熟悉就不多说啦。别误会!电源是用5个五号充电电池组成5×1.2V=6V电压,呵呵,不是一个哦!!
小车前面的红LED是转向指示灯。。。
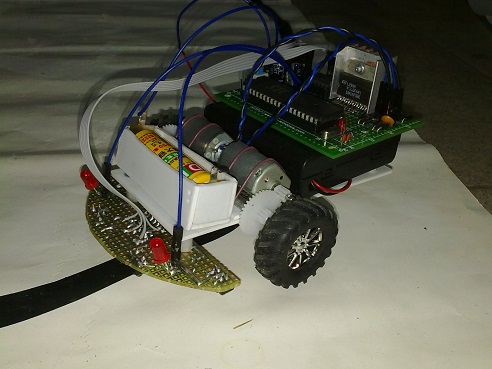

L298N驱动电机,电机用价格便宜的130直流电机。我们试过
用H桥电路驱动电机,由于选的开关管导通压降比较高,所以电机
运行不理想,后来改用了L298N,实验证明驱动效果很棒。
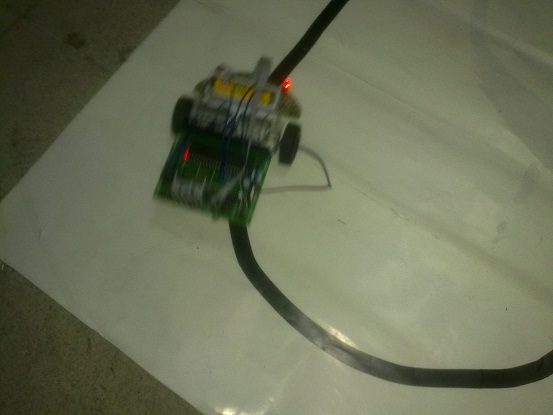
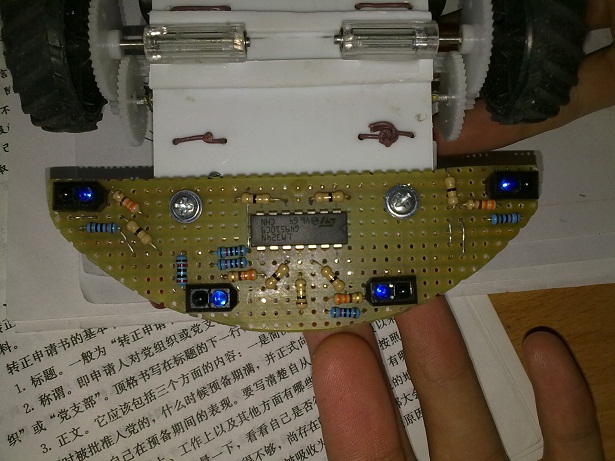
TCRT5000红外反射式传感器和LM324比较器与74LS04反相器
TTL电平滤波。四个传感器并排在车头组成两级检测黑线,中间两
个是第一级检测,第二级的存在是考虑到小车由于惯性偏离导航线。
齿轮组
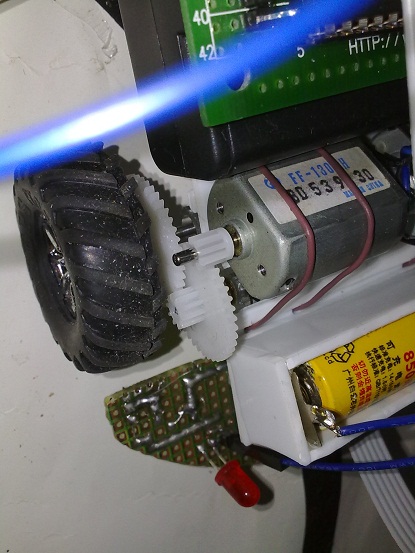
万向轮

轮轴固定

下午赶时间上课,没处理好就上传,对不起大家啦。。。
共2条
1/1 1 跳转至页
【防霉行动】晒一晒我们的DIY基于红外探测轨迹追踪机器人设计
只看楼主 1楼
关键词: 防霉 行动 一晒 我们 基于 红外 探测 轨迹 追
共2条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

