
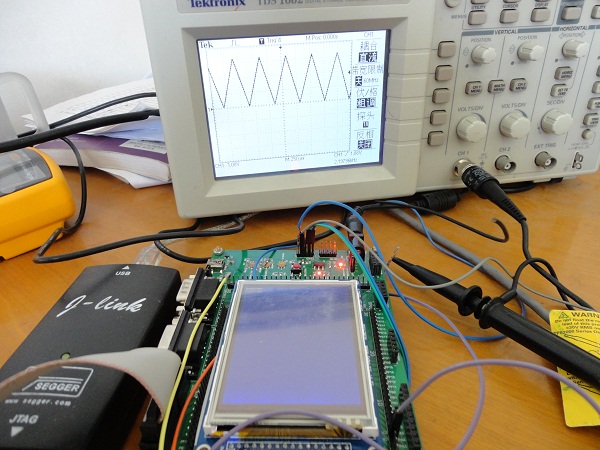
三角波 
程序
void DAC_init(void)
{
DAC_InitTypeDef DAC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
/* TIM2 Periph clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
/* DAC Periph clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE);
/* TIM2 Configuration */
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = 1;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/* TIM2 TRGO selection */
TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_Update);
/* DAC channel1 Configuration */
DAC_InitStructure.DAC_Trigger = DAC_Trigger_T2_TRGO;
DAC_InitStructure.DAC_WaveGeneration = DAC_WaveGeneration_Triangle;
DAC_InitStructure.DAC_LFSRUnmask_TriangleAmplitude = DAC_TriangleAmplitude_4095;
DAC_InitStructure.DAC_OutputBuffer = DAC_OutputBuffer_Disable;
DAC_Init(DAC_Channel_1, &DAC_InitStructure);
/* Enable DAC Channel1: Once the DAC channel1 is enabled, PA.04 is
automatically connected to the DAC converter. */
DAC_Cmd(DAC_Channel_1, ENABLE);
/* Set DAC dual channel DHR12RD register */
DAC_SetChannel1Data(DAC_Align_12b_R,0);
/* TIM2 enable counter */
TIM_Cmd(TIM2, ENABLE);
}
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

