
今天加上了指南针和高度传感器
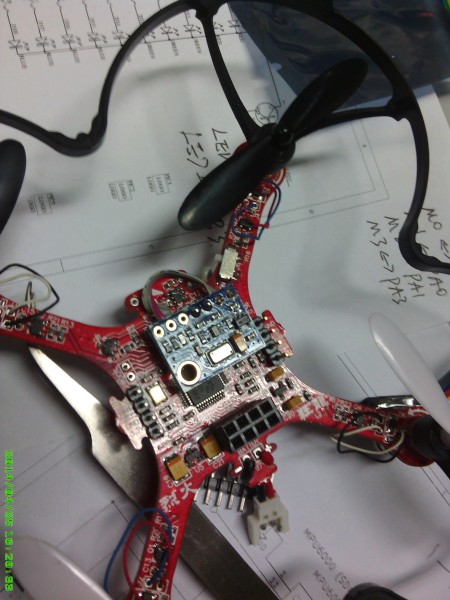
下图是指南针,为了协调方向,就把它黏在这里了

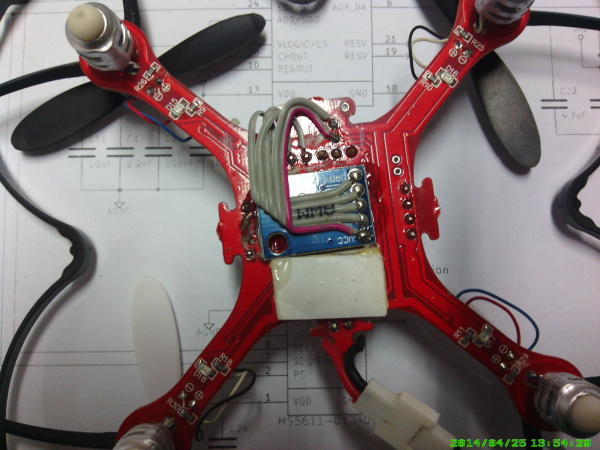
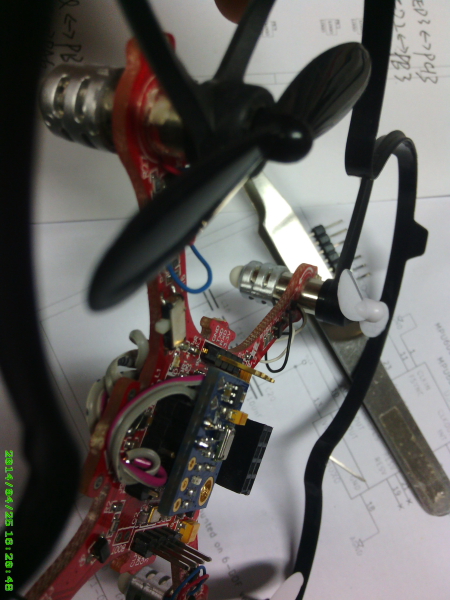
下图是气压传感器MS5611用作测量高度,焊接方式如下
利用四轴上提供的接口焊上插针,然后将模块焊在插针上,用来固定,正好那两个是I2C1的两个引脚。
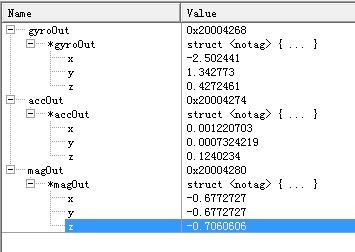
下图是软件运行结果
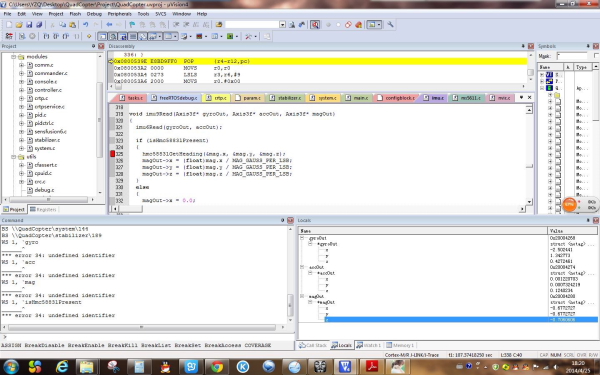
可以看到读取的数据
明天去听大师讲解!!!
好久没来了,是不是都被大家遗忘了。
刚更新了视频,crazyflie 在烈火四轴上移植 与Crazyflie PC client的通信演示,给大家提供我之前在keil和IAR上移植的crazyflie-firmware, QuadCopter.zip压缩包里有工程文件,keil的可以直接调试运行,IAR的调试没有错误,还得进一步调试。里面有Source Insight 工程,建议大家用Source Insight 查看代码。
我还得去忙毕设啊,大家继续努力。有什么需要可以联系我。
来源: 新浪博客
http://www.yanfabu.com/News_index_viewPage_id_1398.html
飞行原理
首先是动态的平衡,quadrotor利用对称分布和相邻旋翼的相反的转动惯量相互平 衡而达到整个机体的动态平衡。
在具体介绍飞行原理之前,首先要介绍一下飞行器的坐标系下的运动。

在笛卡尔直角空间坐标系里共有6种运动,即沿x,y,z轴向的线性运动和围绕轴向的旋转运动。线性运动比较容易描述。旋转运动则 可定义为roll, pitch, yaw。roll运动是围绕机身前后轴的旋转运动;pitch运动是围绕与机身垂直方向轴的旋转运动;yaw运动是围绕机身垂直方向的旋转运动。如图所示。
转动惯量平衡
由于quadrotor的特殊结构,只有保证转动惯量的平衡才能保证quadrotor的动态平衡。公式如下:
k(w1^2+w3^2-w2^2-w4^2)= 0
k是一个常数,w是角速度。
悬停 (hovering)

悬停运动是最基本的运动,此时仅需由4个rotor提供的升力平衡重力,flyer就可以进行悬 停运动。
w1=w2=w3=w4
升降运动

升降运动和悬停运动类似,4个rotor的转速相同。通过改变他们的转速进而改变他们产生的升力,以此控制运动的升降。
Roll运动

Roll运动是围绕前后方向的旋转运动。此运动中,前后转速不变,左右转速相应变化。粗鲁计算时,左右的转速变量近似相 等。但详细计算时会发现,为使转动惯量平衡,左右转速变量明显不同。
Pitch运动

Pitch运动是围绕左右方向的旋转运动。此运动中,左右转速不变,前后转速相应变化。转速计算方法与Roll运动相同。
Yaw运动

Yaw运动相对于roll和pitch运动计算上更为简单,只需同时改变前后和左右的转速即可。但要 保证升力和重力的动态平衡。
动力特性
quadrotor是一个欠驱动系统(underactuated system)。 quadrotor有6个自由度,但却仅有4个自由度直接可控(z轴方向的运动,pitch,roll,yaw),有4个自由度耦合(pitch和x方向的运动,roll和y方向的运动),所以该系统是欠驱动系统。因此在进行转速计算时,必须同时考虑到转动惯量和升力的变化,此外还有运 动时产生的倾角造成的升力损失。所以,系统建模的时候应充分考虑到这些因素。
布局
Quadrotor四旋翼的布局也是有不同的分类的,即cross和X布局。上面图解中的为典型的cross布局,即x和y周与电机的轴线重合;而X布局的x和y轴与电机轴线成45度角。现在从理论上来讲,如果四个电机的特性一致,螺旋桨完美平衡的话,X布局明显比cross布局有优势,因为其x和y轴的运动同时由4个电机完成而非X布局中的两个,所以力矩明显变大,可控的阈度增加。
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

