
感谢萌主给了我这个开发板试用的机会。
因为时间原因,板子收到吃了一段时间灰,没有及时写测评,在此感到对不起盟主,不知道有没有被拉黑
下面进入正题:。。。。。。。。。。。。。。。。
开发方式
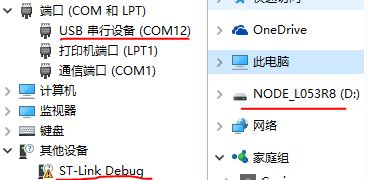
nucleo(下称核板)开发板果然与众不同,通过usb链接PC后,出现三个设备,从上到下分别是串口、储存设备、link Debug设备,最后一个设备需要驱动才能使用。
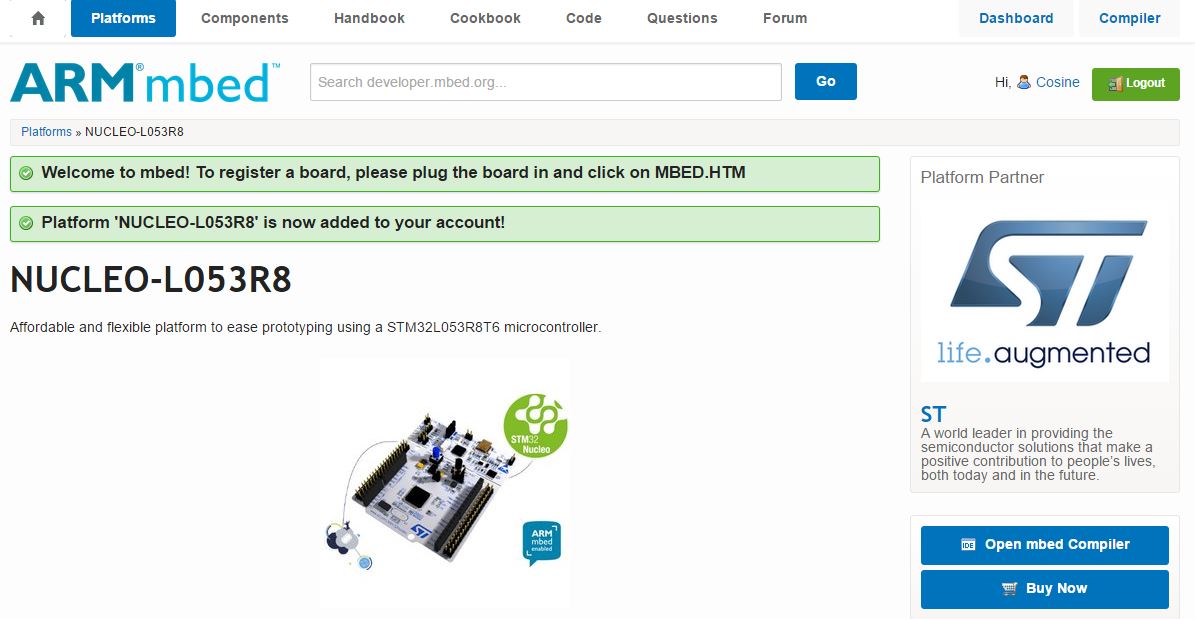
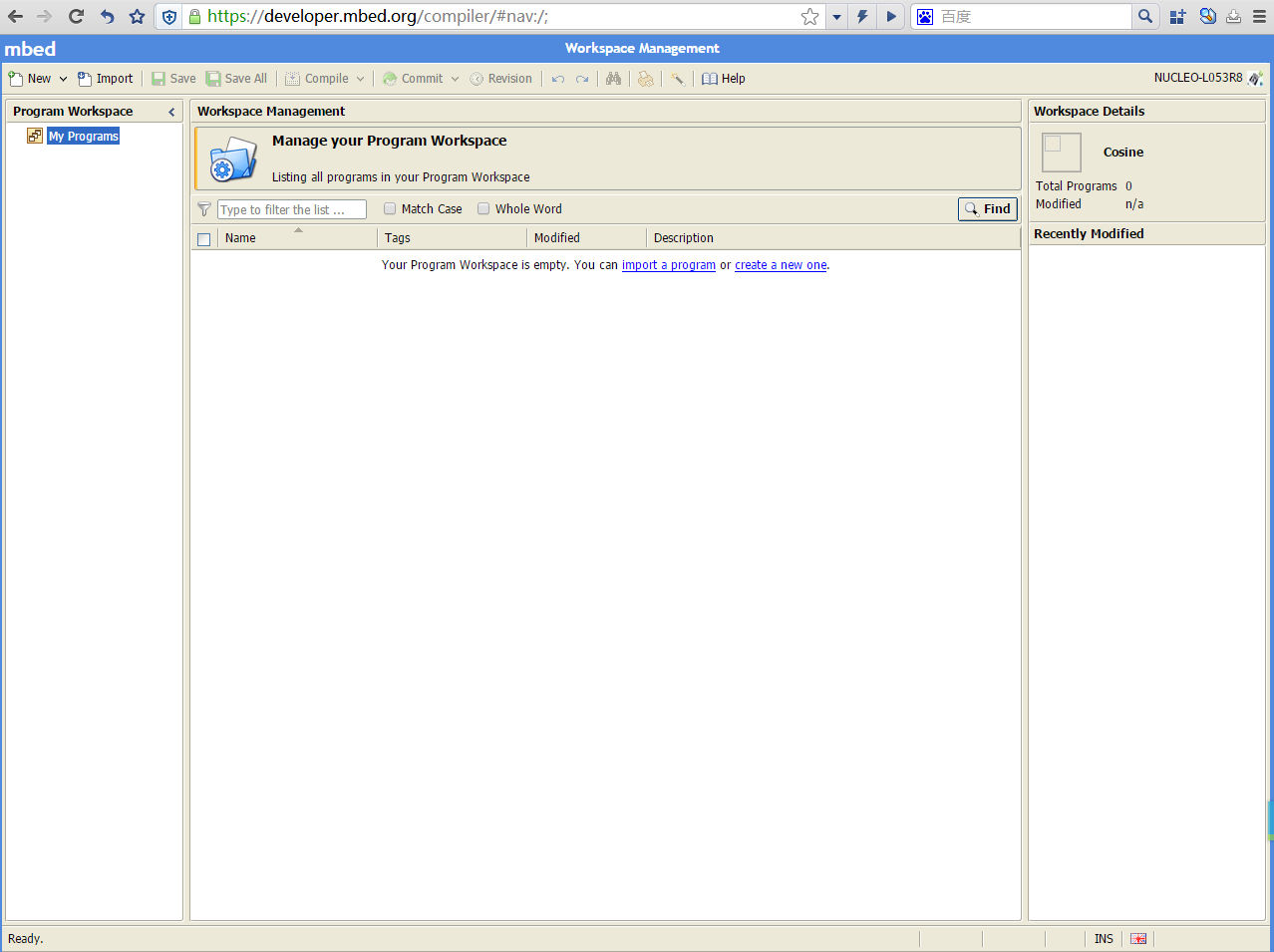
那么集成开发环境呢,找了一圈才知道,原来就是磁盘里那个网页文件跳转后的STM Mbed平台。

打开网页能自动进入平台,注册新账号即可添加开发板到你的账号里,然后就能使用这个在线的集成开发环境了。
右上角的"Compiler"进入IDE
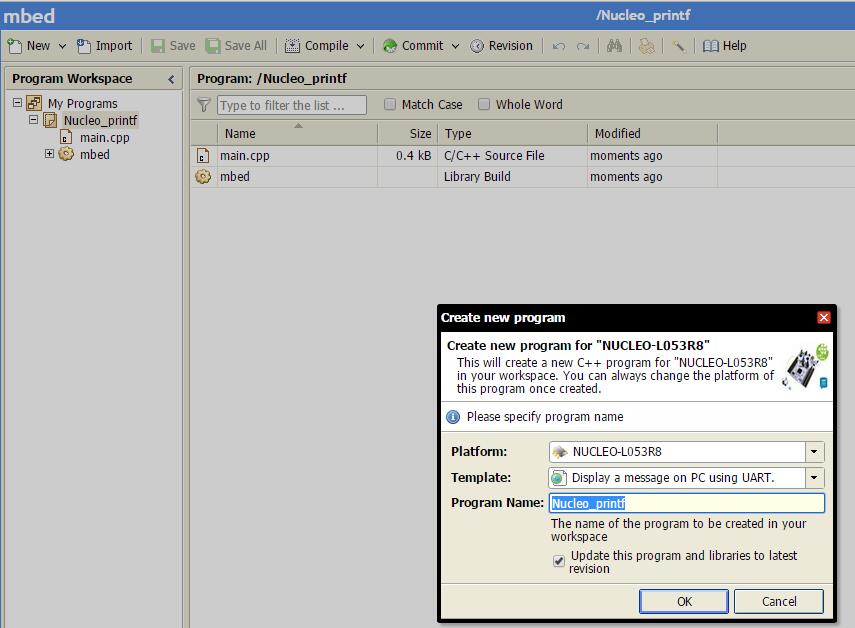
这时可以创建新程序,还有一些模板可以选择
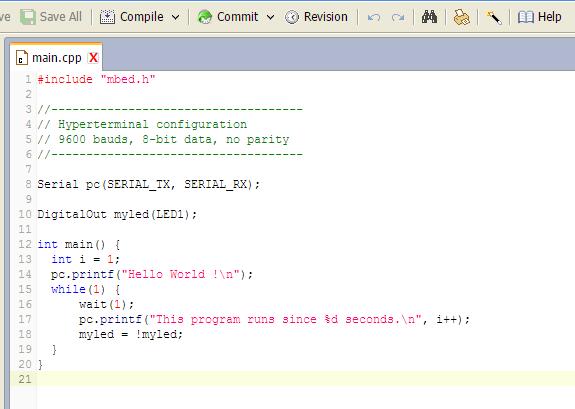
这时点 编译 就能编译出.bin可执行文件,然后下载到 核板 的磁盘就能自动运行
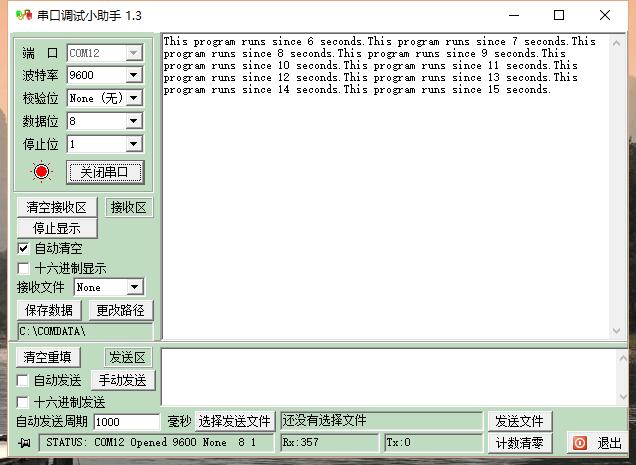
真的很容易上手,感觉和Arduino有异曲同工之妙
了解核板
前面提到了Link Debug,这是什么功能呢。
于是我在这里找到了很多核板的参数:
https://developer.mbed.org/platforms/ST-Nucleo-L053R8/
下面是摘抄:
核板特点
UART 共用到在 D0、 D1 脚
These pins are shared with the PC Serial connection via STLink. If you need to use these pins independently, see this page:https://developer.mbed.org/teams/ST/wiki/Use-of-D0D1-Arduino-pins
引脚使用提示
Only the labels written in blue/white or green/white (i.e. PA_4, PB_5, A0, D14, LED1...) must be used in your code. The other labels are given as information (alternate-functions, power pins, ...). You can also use these additional labels:
SERIAL_TX=PA_2 I2C_SCL=PB_8 SPI_MOSI=PA_7 PWM_OUT=PB_3
SERIAL_RX=PA_3 I2C_SDA=PB_9 SPI_MISO=PA_6
SPI_SCK =PA_5
SPI_CS =PB_6
扩展板使用提示
先从移植Arduino小制作开始更吧,我发现我的程序非常多,如果移植每个程序都做大量查找替换操作,那会非常繁琐。

还好C语言很灵活并且有强大的宏功能。
这是mbed上的BLink程序:

而这是Arduino Blink:

我先创建了空模板项目

函数实现:
已有函数


把Arduino程序复制过来加个头尾

头实现


其中pinMode是假函数,这样就能在移植时做最少修改了,加了头尾和宏定义引脚即可。
Delay函数也可以用宏替换实现,但是考虑到还有wait()函数,可以再定义个float参数的delay(float sec),所以我用函数实现。
编译运行通过。。。。。
Blink过后,我移植了一个显示温度湿度的LED屏小制作。

main.cpp
#include "mbed.h"
#include "Arduino.h"
Serial serial(USBTX, USBRX);
#include "LED_Array.h"
#include "Dht11.h"
Dht11 DHT11(D7);
unsigned char RedData[70] = { 0 };
unsigned char GreenData[70] = { 0 };
unsigned char BlueData[70] = { 0 };
unsigned char humb = 0;
unsigned char temp = 0;
unsigned char old_humb = 0;
unsigned char old_temp = 0;
unsigned char count = 0;
void ColouredPos(int pos, char color, char value)
{
boolean R = color & 0x01;
boolean G = color & 0x02;
boolean B = color & 0x04;
//根据色权转二进制以对指定位置制定色板上色
if (R)
DotToData(RedData, pos, value);
else
DotToData(RedData, pos, 0x10);
if (G)
DotToData(GreenData, pos, value);
else
DotToData(GreenData, pos, 0x10);
if (B)
DotToData(BlueData, pos, value);
else
DotToData(BlueData, pos, 0x10);
}
void ColouredPos(int pos, char color)
{
//模板套用简化
char value = 12;
switch (pos) {
case 0:
value = 12;
break;
case 5:
value = 13;
break;
case 2:
value = 14;
break;
case 7:
value = 15;
break;
}
ColouredPos(pos, color, value);
}
void ColouredValue(int value, char color, boolean temp)
{
unsigned char LeftPos = 1;
unsigned char RightPos = 4;
if (!temp) {
LeftPos = 3;
RightPos = 6;
}
ColouredPos(LeftPos, color, value / 10 % 10);
ColouredPos(RightPos, color, value % 10);
}
void testOne()
{
for (int i = 0; i < 8; i++) {
ColouredPos(0, i);
ColouredPos(5, i);
ColouredPos(2, i);
ColouredPos(7, i);
ColouredValue(9, i, 1);
ColouredValue(51, i, 0);
for (int n = 80; n > 1; n--) {
Write_LED_Array(RedData, RED);
Write_LED_Array(GreenData, GREEN);
Write_LED_Array(BlueData, BLUE);
}
}
}
void testTwo()
{
ColouredPos(0, RED);
ColouredPos(5, YELLO);
ColouredPos(2, BLUE);
ColouredPos(7, YELLO);
ColouredValue(16, CYAN, 1);
ColouredValue(51, GREEN, 0);
while (1) {
Write_LED_Array(RedData, RED);
Write_LED_Array(GreenData, GREEN);
Write_LED_Array(BlueData, BLUE);
}
}
void getDHT11()
{
count++;
int chk;
do {
chk = DHT11.read();
} while (chk == DHTLIB_OK);
if (count == 100) {
count = 0;
old_humb = humb;
old_temp = temp;
}
humb = DHT11.getHumidity();
temp = DHT11.getFahrenheit();
if (humb >= old_humb)
ColouredValue(humb, GREEN, 0);
else
ColouredValue(humb, CYAN, 0);
if (temp >= old_temp)
ColouredValue(temp, GREEN, 1);
else
ColouredValue(temp, CYAN, 1);
serial.printf("Humidity (%%): %d\n",humb);
serial.printf("Temperature (oC): %d\n\n",temp);
// Serial.print("Humidity (%): ");
// Serial.println(humb, DEC);
// Serial.print("Temperature (oC): ");
// Serial.println(temp, DEC);
// Serial.println();
}
void setup()
{
Init_LED_Array();
//Serial.begin(9600);
ColouredPos(0, BLUE);
ColouredPos(5, BLUE);
ColouredPos(2, BLUE);
ColouredPos(7, BLUE);
ColouredValue(0, CYAN, 1);
ColouredValue(0, GREEN, 0);
//t.every(10000, getDHT11);
}
void loop()
{
//t.update();
getDHT11();
for(long i=0; i<100; i++) {
Write_LED_Array(GreenData, GREEN);
Write_LED_Array(BlueData, BLUE);
}
serial.printf("LOOP!!!\n");
}
int main()
{
setup();
while(1) {
loop();
}
}
LED_Array.h & cpp
#ifndef LED_Array_H
#define LED_Array_H
#define HaltSize 1
#define LIGHT 160
#define R0 D2
#define R1 D3
#define G0 D8
#define G1 D9
#define L0 D11
#define L1 D12
#define STB A4//RCLK STCP//STB 正脉冲(几十纳秒)更新输出
#define CLK A5//SCLK SHCP//CLK 上升沿位移输入数据
#define EN D13//OE 低电平开启
#define RowA A0
#define RowB A1
#define RowC A2
#define RowD A3
/*色权
* 基本:
* 0——无色
* 1——红色
* 2——绿色
* 4——蓝色
* 扩展:
* 3——红绿:黄
* 5——红蓝:桃
* 6——蓝绿:青、
* 7——白
*/
#define OFF 0
#define RED 1
#define GREEN 2
#define BLUE 4
#define PINK 5
#define YELLO 3
#define CYAN 6
#define WHITE 7
const unsigned char Dot[] =
{
0x00, 0xFE, 0xC6, 0xCE, 0xD6, 0xE6, 0xC6, 0xFE,//G:\WPad\0.BMP0
0x00, 0x38, 0x18, 0x18, 0x18, 0x18, 0x18, 0x3C,//G:\WPad\1.BMP0
0x00, 0xFE, 0x06, 0x06, 0xFE, 0xC0, 0xC0, 0xFE,//G:\WPad\2.BMP0
0x00, 0xFE, 0x06, 0x06, 0xFE, 0x06, 0x06, 0xFE,//G:\WPad\3.BMP0
0x00, 0xC6, 0xC6, 0xC6, 0xFE, 0x06, 0x06, 0x06,//G:\WPad\4.BMP0
0x00, 0xFE, 0xC0, 0xC0, 0xFE, 0x06, 0x06, 0xFE,//G:\WPad\5.BMP0
0x00, 0xFE, 0xC0, 0xC0, 0xFE, 0xC6, 0xC6, 0xFE,//G:\WPad\6.BMP0
0x00, 0xFE, 0x06, 0x0C, 0x18, 0x30, 0x60, 0x60,//G:\WPad\7.BMP0
0x00, 0xFE, 0xC6, 0xC6, 0xFE, 0xC6, 0xC6, 0xFE,//G:\WPad\8.BMP0
0x00, 0xFE, 0xC6, 0xC6, 0xFE, 0x06, 0x06, 0xFE,//G:\WPad\9.BMP0
0x00, 0x10, 0x38, 0x7C, 0xFE, 0x00, 0x00, 0x00,//G:\WPad\up.BMP0
0x00, 0x00, 0x00, 0xFE, 0x7C, 0x38, 0x10, 0x00,//G:\WPad\down.BMP0
0x00, 0x18, 0x24, 0x24, 0x34, 0x34, 0x34, 0x18,//G:\WPad\temp2.BMP0
0x00, 0xE6, 0xA8, 0xE8, 0x08, 0x08, 0x08, 0x06,//G:\WPad\temp.BMP0
0x00, 0x10, 0x10, 0x38, 0x7C, 0x7C, 0x7C, 0x38,//G:\WPad\humb2.BMP0
0x00, 0xE2, 0xA4, 0xE8, 0x10, 0x2E, 0x4A, 0x8E,//G:\WPad\humb.BMP0
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,//0x00
};//字模
void Write_595(unsigned char Data, PinName PIN_595);
//this is the base driver of 74HC595
void Init_LED_Array(void);
//put this function into setup()
void Display();
//you can modify this function to display contents that you what to show
void Write_LED_Array(unsigned char *Data, unsigned char color);
//this is the base driver of LED array
void DotToData(unsigned char *Data, unsigned char Pos, unsigned char Draw);
//将字模放到数组中指定屏幕区域
#endif
#include "mbed.h"
#include "Arduino.h"
#include "LED_Array.h"
void Display()//you can modify this function to display contents that you what to show
{
// unsigned char i;
// for (i = 80; i > 1; i--)
// {
// Write_LED_Array(0, &cod1[0x0000], R0); //Write_LED_Array(pos,data,color);
// Write_LED_Array(1, &cod1[64], R1);
// }
// for (i = 80; i > 1; i--)
// {
// Write_LED_Array(0, &cod1[128], R0); //Write_LED_Array(pos,data,color);
// Write_LED_Array(1, &cod1[192], R1);
// }
}
void Init_LED_Array(void)//put this function into setup()
{
pinMode(R0, OUTPUT);
pinMode(R1, OUTPUT);
pinMode(G0, OUTPUT);
pinMode(G1, OUTPUT);
pinMode(L0, OUTPUT);
pinMode(L1, OUTPUT);
digitalWrite(R0, LOW);
digitalWrite(R1, LOW);
digitalWrite(G0, LOW);
digitalWrite(G1, LOW);
digitalWrite(L0, LOW);
digitalWrite(L1, LOW);
pinMode(STB, OUTPUT);
pinMode(CLK, OUTPUT);
pinMode(EN, OUTPUT);
pinMode(RowA, OUTPUT);
pinMode(RowB, OUTPUT);
pinMode(RowC, OUTPUT);
pinMode(RowD, OUTPUT);
digitalWrite(EN, HIGH);
digitalWrite(STB, LOW);
}
void Write_595(unsigned char Data, PinName PIN_595) //this is the base driver of 74HC595
{
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x80));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x40));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x20));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x10));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x08));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x04));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x02));
digitalWrite(CLK, HIGH);
digitalWrite(CLK, LOW);
digitalWrite(PIN_595, (Data & 0x01));
digitalWrite(CLK, HIGH);
}
void Write_LED_Array(unsigned char *Data, unsigned char color) //this is the base driver of LED array
{
unsigned char *pTemp;
unsigned char row;
PinName DataPin = R0;
PinName DataPin2 = R1;
if (color == GREEN) {
DataPin = G0;
DataPin2 = G1;
} else if (color == BLUE) {
DataPin = L0;
DataPin2 = L1;
}
for (row = 0; row < 16; row++) {
digitalWrite(EN, HIGH);
pTemp = (Data + row * 2);
if (HaltSize && row >= 8) {
Write_595(*pTemp, DataPin2);
Write_595(*(pTemp + 1), DataPin2);
Write_595(*(pTemp += 32), DataPin2);
Write_595(*(pTemp + 1), DataPin2);
} else {
Write_595(*pTemp, DataPin);
Write_595(*(pTemp + 1), DataPin);
Write_595(*(pTemp += 32), DataPin);
Write_595(*(pTemp + 1), DataPin);
}
digitalWrite(STB, HIGH);
delayMicroseconds(1);
digitalWrite(STB, LOW);
delayMicroseconds(1);
digitalWrite(RowA, (row & 0x01)); //set display line
digitalWrite(RowB, (row & 0x02)); //Sequential scan
digitalWrite(RowC, (row & 0x04));
if (!HaltSize)
digitalWrite(RowD, (row & 0x08));
digitalWrite(EN, LOW);
delayMicroseconds(LIGHT);
}
}
void DotToData(unsigned char *Data, unsigned char Pos, unsigned char Draw)
{
//将字模放到数组中指定屏幕区域
/*区域
Pos:
0 1 4 5
2 3 6 7
*/
const unsigned char *p = &Dot[Draw * 8];//字模编号取得指针
//区域处理
char n = Pos / 2;
Pos = Pos % 2;
for (char i = n * 16; i < (n + 1) * 16; i += 2) {
if (Pos)
Data[i + 1] = *(p++);
else
Data[i] = *(p++);
}
}
Arduino.h & cpp
#ifndef Arduino_H #define Arduino_H #define HIGH 1 #define LOW 0 #define pinMode(PinName,Mode) #define digitalWrite(PinName,Value) DigitalOut(PinName,Value) #define digitalRead(PinName,Value) DigitalIn(PinName,Value) #define delayMicroseconds(us) wait_us(us); typedef bool boolean; //#define print void delay(int ms); #endif
#include "mbed.h"
#include "Arduino.h"
void delay(int ms)
{
wait_ms(ms);
}
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

