
引言
HID是高压气体放电灯(High Intensity Discharge)的缩写,也可称为重金属灯或者氙气大灯。与传统卤素灯泡相比,HID有亮度高、寿命长、省电等优点。
正是由于HID具有高亮度的特点,如果使用时照射高度调节不当,在会车时将会对迎面来车的司机造成强烈的眩目,产生安全隐患。为了规范HID前照灯的市场,联合国欧洲经济委员会(United Nations Economic Commission for Europe)在ECE-R48条款中明确规定:装备HID前照灯的车辆必须配备能够全自动调节其照射高度的系统,也可称之为前照灯水平自动调光系统。该系统工作时,会根据车辆负载的变化自动调整HID前灯的投射俯仰角度,确保其投射高度在合适的范围内,既达到良好的照明效果,又不会对迎面车辆的司机造成眩目。
系统总体方案设计
如图1所示,系统可分为三个部分,即车身高度传感器、中央控制单元和驱动执行单元。系统运作情况如下:该系统的主MCU(MC68HC908GZ60)采集车身前后轴高度传感器的信号,经运算后发出控制信号分别给左右前照灯的水平调光步进电机,指示电机转动到指定位置,完成自动调光。

系统硬件设计
车身高度传感器
该系统的主要原理是利用测定车内两个基准点(约前、后轴位置)到地面的距离差得出车辆的倾斜角度信号,从而进行水平调节。可选择光电编码式的车高传感器,把车身高度的变化(悬架变形量的变化)变换成传感器轴的旋转,将检测出的旋转角度信号转变为电压信号输入MCU。实验中,车身高度传感器在车左前轮和左后轮内侧各装一个。
中央控制单元
系统中央控制单元采用飞思卡尔(Freescale)公司生产的MC68HC908GZ60芯片为主MCU,配合其他必要元件组成控制单元电路。该芯片主要特性有:8位HC08型CPU,开发资源丰富,兼容性好;片载60KB Flash EEPROM,2KB RAM;24通道A/D转换模块,10位精度。
此外,选择飞思卡尔MC33399芯片与核心MCU通过SCI口相连,作为LIN总线收发器。该芯片最多可以驱动16个节点。
之所以选择LIN总线,是因为它已经是车用总线中较为普及的一种,它的优点是芯片价格低廉,性价比高。LIN总线信号传输速率可达19.2kbps,一般用在对汽车安全性要求不高的控制场合,例如电控门窗、车灯开关控制等。
LIN总线主节点电路原理图如图2所示。
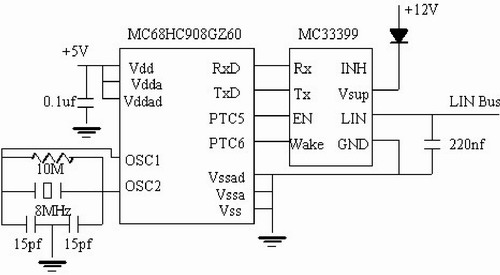
图2 LIN总线主节点电路原理图
驱动执行单元
驱动执行单元,主要是通过获取LIN总线上的信号,来控制步进电机转动,从而带动前照灯反光板沿垂直方向转动,完成水平调光。
此处选择了美国AMI半导体公司的AMIS-30623步进电机控制芯片。该芯片属高集成度芯片,内建了电源模块、控制器、LIN总线收发器和步进电机驱动。其主要特性有:最高峰值电流输出达800mA;提供最高达16细分数的步进电机驱动;内建加减速算法;完全兼容LIN1.3规范。
由于AMIS-30623芯片本身不可重新编程,一切操作均通过LIN总线调用其内部函数来完成,所以使用起来十分简便。内建的加减速算法对于控制步进电机变速运动非常有效。
LIN总线从节点电路原理图如图3所示。

图3 LIN总线从节点电路原理图
系统软件设计
软件方面,采用1ms定时中断采集,每次中断到来时采取一组传感器输出的电压值。经过预判断后,将有效数据保留,带入公式计算,得出需要步进电机转动到的目标位置。通过LIN总线向相应的AMIS-30623芯片发送信号,控制步进电机按加速—匀速—减速的方式平稳运动到相应位置。该程序在Freescale CodeWarrior 5.7.0环境下编译通过。主程序流程如图4所示。

图4 系统主程序流程图
实验结果
为了验证该系统的动态调光性能,在实验室环境下搭建了一个能够模拟车身俯仰运动的实验平台。实验过程中,控制平台本身按一定幅度作俯仰运动,测得调光系统阶跃响应时间约420ms,调整时间小于1s,稳态误差约0.035°,满足了动态自动调光的基本要求。
结语
该系统实现了对汽车前照灯自动调光的基本功能,为进一步开发更为复杂的自适应前照灯系统(Adaptive Frontlighting System)奠定了基础。
此外,该系统实际上是一套基于LIN总线和单片机的小功率步进电机控制系统。LIN总线作为一种成本低廉、有较强容错性的局域总线,在汽车和工业控制等环境中正得到越来越广泛地应用。该系统易开发、易维护、成本低廉,可最多添加至16个子节点,增减节点前后软件方面完全兼容,无需重新编程。因此,该设计方案在小功率步进电机控制领域具有一定的推广价值。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

