 使用滚轮式的吸球方式在国际机器人足球的实战中得到了广泛的应用,从以前到现在的比赛中我们在国际赛场上都时常看到大块的铁家伙把控制着球,缓慢的转身,然后射门的情景。对于乐高器材的使用者来说,似乎这是一件比较困难的事,而且代表着乐高器材非常高的使用水平的广西柳州的队伍也一直保持着冲撞式的机械结构和打法。那么是否用乐高积木就无法获得这种功能呢?答案是否定的。本文就将具体介绍一种纯乐高的解决方案。 使用滚轮式的吸球方式在国际机器人足球的实战中得到了广泛的应用,从以前到现在的比赛中我们在国际赛场上都时常看到大块的铁家伙把控制着球,缓慢的转身,然后射门的情景。对于乐高器材的使用者来说,似乎这是一件比较困难的事,而且代表着乐高器材非常高的使用水平的广西柳州的队伍也一直保持着冲撞式的机械结构和打法。那么是否用乐高积木就无法获得这种功能呢?答案是否定的。本文就将具体介绍一种纯乐高的解决方案。
足球机器人吸球/弹射装置纯乐高解决方案
广西南宁 韦文潮
导言
使用滚轮式的吸球方式在国际机器人足球的实战中得到了广泛的应用,从以前到现在的比赛中我们在国际赛场上都时常看到大块的铁家伙把控制着球,缓慢的转身,然后射门的情景。对于乐高器材的使用者来说,似乎这是一件比较困难的事,而且代表着乐高器材非常高的使用水平的广西柳州的队伍也一直保持着冲撞式的机械结构和打法。那么是否用乐高积木就无法获得这种功能呢?答案是否定的。本文就将具体介绍一种纯乐高的解决方案。
不过请读者注意:这里并不会给出详细的搭建步骤和完整的程序解决方案。因为本文的目的只是以此,为广大的乐高爱好者提供一个思路。
一. 吸球装置设计原理
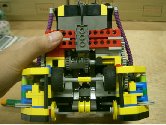
在今年的日本大阪的比赛中出现过一只使用乐高器材的队伍(国外),他们的机器人结构非常之简单,简单到了另人惊讶的地步。下面是我根据比赛录象仿制的结构。因为录象上看不清细节,所以我只把它的主要机械结构展现出来。

图一 全貌(点击图片放大)
大家看到这幅图片就应该知道它是怎么样跑动的。
我们先不管这种机器人会有怎样的竞技表现,只讨论它的吸球装置。没错,就是这么简单。如下图,在侧面我们可以看到足球的受力情况,足球在滚动时受到四个力,当滚动杆的高度和切点到最高点的距离合适时,也就是恰好四力能够平衡,而且在滚轮上对机器人的反推力对机器人本身的运动不会产生过大的影响时,机器人就很好的吸住了球。

图二 受力情况示意图
声明一点:本人数学非常的差劲。
所以在实际制作之前我曾试图通过计算找到合适的参数,结果算得头晕脑胀没有结果,最终不得不放弃了。如果哪位达人能够计算出来(公式,或者普适的参数)还请不吝赐教,在下不胜感激!
下图展示了滚动杆的位置。这是经过多次试验后得出的吸球效果比较理想的位置。

图三 正面视图(点击图片放大)
二. 吸球/弹射
正如大家所看到的这个简单的结构它能够很好的完成吸球的任务,但是如果我们想要增加一个弹射的功能,我们就不得不面对――RCX只有三个输出端口――这个现实。也就是说我们必须用一个马达完成两种功能。
下面就是我利用差速齿轮完成的结构:当马达朝一个方向转动时,动力输出到滚动轴上;当朝相反的方向转动就输出到另一根轴上,上面安装着一个击球杆。这里我用两根“L”型梁来制作。

图四 全貌(点击图片放大)
图五 正面视图(点击图片放大)
上面这个图告诉你各个零部件的关键高度。

图六 棘轮装置(点击图片放大)
这里就是切换两种运动的关键装置:棘轮。
图中的橡胶圈是用来帮助击球杆复位的。

图七 底部视图 图中两个合并在一起的黄色轮毂就是击球杆触球的部分,连接它们的两根“L”型梁就是击球杆,图中是击球杆收起的状态。(点击图片放大)

图八 动力部分(点击图片放大)
上面这个图你可以清楚的看到吸球/弹射装置的齿轮和马达的安装位置。

图九 可拆卸的护栏(点击图片放大)
这里我用了两个马达驱动一边的轮子,能够不错的提升机器人的机动性能。在实战中可以在控球进攻和撞击进攻之间进行战略转换,为程序设计提供了更大的空间。
三. 示例程序
在给机器人编写程序时,需要注意控球时的状态。因为如果在控球时转身或者移动过快则会丢球。这里我的解决方法来自一篇国外的PPT技术文档――可惜文章上注明没有出处,这里我无法向作者致谢――上面提供了一种好比软件实现PWM(脉宽调制)的方法,周期性的打开和关闭驱动马达来降低单位事件内马达的转速,并实现一定的制动。大家可以参看下图中的第4子程序“持球右转”。
另外利用吸球/弹射装置踢球也很简单,参看图中第5子程序“踢球”。

图十(点击图片放大)
顺便提醒一点:这种软件PWM的方法实现中,开关的频率,和马达的档位需要根据实际的机器人的电池类型和机械结构情况进行调试。动力过低则转动时间长,过高则丢球。
四. 结语
本文介绍的结构仅作为抛砖引玉的用处,希望能给同行们一点参考和借鉴。最后我还想说一点我在制作过程中的一个经验:最初我用比较多的(通过两三级惰轮传动)齿轮结构作出了一个看起来非常漂亮的结构,结果是即使我用了两个马达,在滚动杆上表现的控球力量仍然非常的孱弱。经过反复的实验,我才最终明白:是齿轮消耗掉了能量。因为即使是在安装很好的情况下,每没经过一级齿轮,能量都会损耗掉15~30%。这就是为什么在录象中那个机器人只用一个马达都能完成吸球。
再最后给大家推荐Ldraw系列软件,使用这些软件我在电脑上实现了很多虚拟搭建,进行了很多结构的静态实验,大大节省了研究时间。

MLCad:乐高积木的CAD软件,进行主要的虚拟搭建(点击图片放大)
POV-Ray :3D渲染软件,将MLCad设计的模型渲染成平面图像(点击图片放大)
LDView:快速的查看软件,能够立刻看到你搭建的模型的三维视图,并且能从各个角度进行观察(点击图片放大)
|













 我要赚赏金打赏帖
我要赚赏金打赏帖 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

