
| 双足机器人孕育关键技术 写于: 星期二 21 十二月 @ 04:19:18 |
 人形机器人仍然未找到具体的用途。但是,通过人形机器人的研究,却诞生了许多有望应用于其他领域的新技术。本文将从多个侧面对作为科技推动力的人形机器人做一探讨和分析。 人形机器人仍然未找到具体的用途。但是,通过人形机器人的研究,却诞生了许多有望应用于其他领域的新技术。本文将从多个侧面对作为科技推动力的人形机器人做一探讨和分析。 双足机器人孕育关键技术
2005年3月“日本国际博览会(爱?地球博)”将于日本爱知县拉开帷幕。此次博览会的主角将是机器人。作为日本的国策之一,日本新能源?产业技术综合开发机构(NEDO)计划在此次博览会上展出73种机器人(参阅日经报道)。 但也有研究人员担心“爱知万博会过后,机器人热也就随之结束”。有这种想法的原因就在于,20年前在筑波科学万博会开幕之前也曾出现过机器人研究热,但由于没有具体用途,后来很多企业纷纷退出了这一领域。 现在的情况跟20年前一样,人形机器人仍然未找到具体的用途。但是,通过人形机器人的研究,却诞生了许多有望应用于其他领域的新技术。本文将从多个侧面对作为科技推动力的人形机器人做一探讨和分析。
▲机器人孕育的新技术(点击放大)
在人形机器人的研究中进展最大的是控制技术。为了在机器人身上实现双足行走以及用手拿东西等动作,必须实时地向数十个马达发布指令。为了让机器人做出自然而流畅的动作,有效的控制技术是不可缺少的。 “要想单靠一台计算机来控制手和脚的全部动作,处理器的负荷会很大,机器人的反应必然就会迟缓。于是,一种给机器人的每个驱动部分装上小型‘大脑’的分散控制手法就诞生了。这项在机器人领域正逐渐成为主流的技术,完全可以应用到其他领域”,日本千叶工业大学未来机器人技术研究中心研究员清水正晴介绍说。 该研究中心2003年12月发布了以分散控制方式进行控制的“新交通工具”。这就是与日产汽车系列的设计开发公司日本Design Creative Box和Leading Edge Design公司共同开发的 “Hallucigenia 01”样车。 Hallucigenia 01有8个车轮。车身内部安装有8只机械手,手臂顶端装有车轮。8只机械手分别装有一个控制处理器和4个马达。既能改变车轮的转动方向,还可伸展手臂来改变车身高度。 同时控制32个马达的工作原理,与该研究中心主任古田 贵之在2002年开发的双足行走人形机器人“morph 3”完全一样。根据安装在车身上的角度传感器信息,由主计算机向8个车轮发送指令,保持稳定的车身姿态。按照发出的指令,通过改变车身高度,在高低不平的路段或坡道上照样能使车身平稳地向前行驶。另外,还能横向或斜向滑动,以及原地进行360度大转弯。 Hallucigenia只有实车的1/5大小,清水研究员表示“即便是实车,也能够利用几乎同样的控制技术达到设计要求”。该车是证明机器人控制技术完全能够应用于其他领域的一个良好范例。 日本的大阪变压器公司(DAIHEN)2001年开发出一种可跟人握手的人形机器人。该公司业务开发推进本部长笠山文男在介绍人形机器人与产业机器人的不同时指出,“在指定的位置上准确而迅速地移动的是对产业机器人的要求。即使在机器人移动的轨道上有人,它也会毫不理会地冲过去。而与人接触的机器人却要一边判断对方做出了什么样的动作,周围情况有无变化,一边移动。控制思路完全不同”。 该公司自主研发的可跟人握手的机器人控制技术,已经被应用于该公司的医疗器械业务上。今年10月上市的是一种名为“C-Pam”的医用运输机器人。这是一种可帮助医护人员将躺在床上的患者转到搬运平车上的设备。 C-Pam工作时将一个传送装置伸进患者与病床之间,先将患者放到传送装置上,再向平车移动。猛一看,好像很简单。而实际上,边靠传感器掌握患者位置边移动患者,甚至能在连患者穿的睡衣都不弄乱的情况下实现患者的移动,这是机器人才能实现的功能。 机器人控制技术还被应用到了家用产品领域。松下电工今年8月推出的按摩椅“Real Pro GII Premium Class(零售价47万日元)”就是如此。这种产品的最大特点是让过去只能做平面椭圆运动的“按摩球”能够以立体方式运动。通过与能够进行膨胀和收缩运动的气囊动作相配合,甚至能够做出捏肩的动作。利用4个按摩球和40个气囊能够做出335种按摩方式。 然而,仅靠这些还赶不上真正的按摩师。按摩师的叩法包括微妙的力量变化,而机械在力度与方法上却过于单调。为了消除这种差距,松下电工应用了机器人技术。 松下电工先把专业按摩师的按摩动作拍下来,并对身体受到的按摩压力进行测定,然后将按摩师的动作数字化。据此控制按摩球与气囊的动作,尽量使之接近这些数据。松下电工健康生活业务部部长原 彦芳胸有成竹地表示“本公司的控制技术,其他公司轻易模仿不出来”。 传感器与处理器: 不可缺少的立体影像与声音的高速处理技术 识别处理中难度最大的是视觉与听觉。CCD(电荷偶合元件)相机与图像元件等产品现在100日元左右就能买到一个,而用来处理传感器信息的识别处理技术仍处在发展阶段。 如果是静止的物体,按照物体的轮廓和颜色(亮度分布)已经能够进行核对与识别。比如有望活跃于保安领域的警卫机器人,用来检测桥梁与道路状况的检查机器人等目前已经实用化。 然而,人们期待的人形机器人的水平则更高。因此要想边检查四周的安全状况边工作,就必须要有能用眼睛追踪运动物体并进行识别的能力。 作为实现这种能力的手段,利用2部以上的摄像机构成一个三维空间,对物体的形状、与物体之间的距离进行识别处理的技术被业界寄予厚望。声音识别也基本如此。要求机器人具有能在三维空间里确认声音的方向,并对声音内容进行识别的能力。 索尼2003年发表的人形娱乐机器人“QRIO”具有在三维空间里识别图像与声音的功能。QRIO不仅能踢球,如果有人跟它打招呼,还能把脸转向声音的方向,并通过语言来识别对方。 这些识别技术有望应用于家电领域。据说QRIO的识别技术就能够应用于移动电话及车载导航仪等产品的新式操作方法中。然而,“要想实现人类眼睛和耳朵那样的能力还为时尚早。这需要有处理能力数千倍于现有电脑的处理器”(千叶工业大学的清水研究员)。 日本经济产业省已经制定了在2010年以前把机器人培育成一项产业的目标。机器人如能得到普及,就能像汽车和电脑一样成为提高处理器性能的推动力。 驱动装置与结构: 共通的课题是更小更强 在机器人研究者中间,今年有一款受到业内人士广泛关注的名为“KHR-1”的机器人。该机器人身高34cm,体重1.2kg。是日本无线电控制元件制造商近藤科学公司今年6月开始上市的玩具组装套件。千万别因为它是玩具就轻视它。从双足行走到俯卧撑、金鸡独立、侧翻,样样都会(视频文件: http://www.kondo-robot.com)。 尽管并未运用最尖端技术,但这部定价12万6000日元(约合人民币1万元)的玩具却能够熟练地完成3年前价值高达数千万日元的机器人才能完成的动作。性能之高得到了用户广泛的好评,上市3个月销量就已接近1000套。听说美国微软的比尔?盖茨也买了2套。 这种玩具之所以能够做出像杂技一样的动作,秘密就在于一种强劲的小型马达。这个装在一个黑盒子(尺寸为4.1cm×3.5cm×2.1cm)里的小型马达具有高达8.7kg/cm的大力矩。靠着17个这样的小马达,就能随意地活动1.2kg的身体。 “这种马达在无线电控制元件中属于一种特殊的部件,过去这种商品并不太好卖”(近藤科学技术部的秋山好司)。然而,当一些研究机构把它用作了人形机器人的驱动装置,采用这种马达的机器人在机器人比赛“ROBO-ONE”上获奖后,逐渐开始畅销起来。以这种马达为契机,近藤科学开始机器人研究业务。 小而强劲--驱动装置所要求的这种性能约不仅限于玩具世界。 1998年启动到目前已持续5年时间的国家级项目――“人类和谐?共存型机器人系统研究开发”。这个由日本产业技术综合研究所、东京大学、本田、川田工业、安川电机等参加的项目,最终目标是探索机器人在有人环境中和人一起工作的方式。为此要求机器人尺寸与人等大,并且要具有一定的力量。 该项目中最初使用的是以本田1997年开发的双足行走机器人“P3”为原型的“HRP-1”。身高160cm,体重120kg,背上背着一个大电源。由川田工业负责制造的第2代“HRP-2”身高154cm,体重58kg,体重减少了很多。 由于HRP-2体内配有电源,因此能坐在椅子上,还能乘坐汽车。力量上也没有损失。由于马达的体积一小,力量相对就会下降,因此第2代“HRP-2”就引入了利用大小差不多的马达处理2个动作的新方式,HRP-2单手能拿起2kg左右的东西。 本田的机器人是2000年发布的“ASIMO”,体积明显地比HRP-2减小了许多。它身高120cm,体重43kg。体重只有HRP-2的约1/3。ASIMO从基本构造上进行了修改,具有和人一样的骨格,外侧包了一层轻而结实的材料。ASIMO亮相以后,这种构造就成了人形机器人的主流。 开发环境: 按需开发,目标是定制 “这样下去,人形机器人恐怕很难进入家庭”,产综研负责机器人技术评估的首席评估师谷江 和雄有一种危机感。
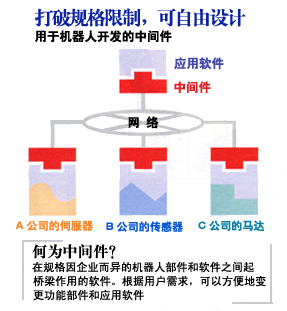
▲机器人中间件设想
机器人研究过去无论是官方还是民间都是独立进行的。因此机器人使用的部件和控制软件也都互不兼容。哪怕是看起来一样的人形机器人,所使用的部件和软件也不兼容。 假设有的用户希望有这样的人形机器人,“把机床加工好的部件取出来送到事务所”。但从目前的情况看,由于生产产业机械和人形机器人的厂商不同,所以还难以实现。更何况目前还不能满足将B公司的手臂部分接到A公司机器人身体上的定制要求。 NEDO、产综研以及日本机器人工业协会等单位联手,自2001年开始做的工作就是统一机器人的开发环境。具体而言就是在马达、传感器、控制软件等构成机器人的部件方面,进行中间件的开发,以此为桥梁,即便制造商不一样,也能将同一种部件安装到不同的机器人上。 目前正在讨论中间件的规格制定工作。规格一旦确定,不仅单单有助于机器人设计,还能使产业机器人跟家电产品配合工作。 “这样就可以像建定制住宅一样,形成一项根据用户要求定制机器人的业务。同时还有望孕充出将机器人与住宅、工厂及医院等的信息系统连为一体的全新业务”,产综研智能系统研究部门主任研究员神德 彻雄说。 对于这一趋势,也有人认为“机器人的性能日新月异。制定规格反而有可能扼杀其发展的可能性”。其他国家也在奋起直追,比如韩国准备投入100亿日元,大力发展人形机器人。 谷江首席评估师强调指出,“日本已经迈入着手构建机器人应用环境时期。只要以用户需求为基点,一定能形成机器人的专用领域、推动技术创新”。 材料与电源:室外机器人亮相,产生新一代电池需求 新一代燃料电池有望于2010年前后普及。机器人配备燃料电池的尝试也已开始。日本综合警卫保障公司已经开发成功了在2002年上市的警卫机器人 “Guard Robo C4”上配备燃料电池的样机。工作时间虽说只有40分钟左右,不过将来的目标是实现连续工作1周的能力。 东芝也发布了把燃料电池用作辅助电源的家用机器人样机“ApriAlpha”。假如只靠主电源(锂离子充电电池),工作时间约为2小时。如配合使用燃料电池,则可延长到10个小时左右。 如果电池电量不足时机器人会自己找到充电位置进行充电的话,就可以实现更长时间的工作。警卫机器人C4就具有回到充电器位置充电的功能。因此,对于机器人来说燃料电池已经不再是急待解决的课题。 各公司正在积极寻求通过降低机器人体重来控制耗电量、延长工作时间的方法。飞机使用的超轻超强的“超硬铝(Extra Super Duralumin)”及“碳化树脂”、汽车使用的“FRP(纤维强化塑料)”等复合材料受到了业界的关注。不过,据负责HRP-2制造的川田工业航空机械业务部表示,目前尚无机器人专用的材料。 如果将来如果机器人走出家门、在野外一展身手的话,就必须有专用的轻质材料了。如果离开了可以充电的环境,那么机器人就必须具有象汽车和移动电话一样的长时间工作能力。正像处理器、传感器和控制技术一样,对于材料和电源来说,机器人也有可能成为促进其发展的牵引力。(记者:濑川 明秀) ■相关报道 |
共1条
1/1 1 跳转至页
双足机器人孕育关键技术
只看楼主 1楼

关键词: 双足 机器人 孕育 关键 技术 人形 机器 人的
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

