
| 圆梦小车 Step by Step 之六――让小车“看到”障碍物 写于: 星期二 04 九月 @ 03:34:18 |
圆梦小车 Step by Step 之六 ――让小车“看到”障碍物 作者:Hanker
前面的章节:
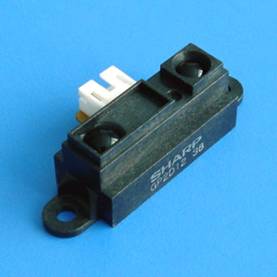
前一篇讲述了如何在“路”上行走,本篇让小车学会“看到”避障物! 机器视觉中最接近人眼的莫过于摄像头了,可图像处理小车的“大脑”对付不了,至少目前的“大脑”能力不够,等进化后也许能够应付。 为了能“看到”障碍物,小车目前能用的主要是各类测距传感器,典型的有超声波和红外两种,此外还有利用光线的反射强弱来判断的,这种方式不具备“测距”功能,但可以判断有无!因为不同物体表面及颜色反射的能力不同(看后面的数据)。 本文主要讨论的是机器人中最常用的红外测距传感器 ―― GP2D12。 一、“看到”障碍物的眼睛 ―― 红外测距传感器首先认识一下:
首先是因为在机器人活动中(不包含工业机器人)这个传感器最常用,几乎每家国外的机器人配件供应商都提供。使用Google英文版搜索一下“MiniSumo”,你将会发现GP2D12 使用是多么普遍。 其二是因为它的测距范围和小车的“个头”及运动速度匹配,对于10cm见方、运动速度10 |
共1条
1/1 1 跳转至页
圆梦小车 Step by Step 之六――让小车“看到”障碍物
只看楼主 1楼
关键词: 圆梦 小车 之六 看到 障碍物
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

