
| Quadlator II--T.I.Tech Robot Driver驱动器,基本的反馈回路 写于: 星期六 29 四月 @ 13:11:21 |
Quadlator II--T.I.Tech Robot Driver驱动器,基本的反馈回路 作者:baredog 三,T.I.Tech Robot Driver驱动器,基本的反馈回路 3.1 T.I.Tech-robot driver. T.I.Tech robot driver 是东京工业大学广濑研究室制作的一PWM电机驱动器,目前(2004年底)为止,已经演化了3个版本。
titech driver 版本1
titech driver 版本2
189 w type of PC-0144-2
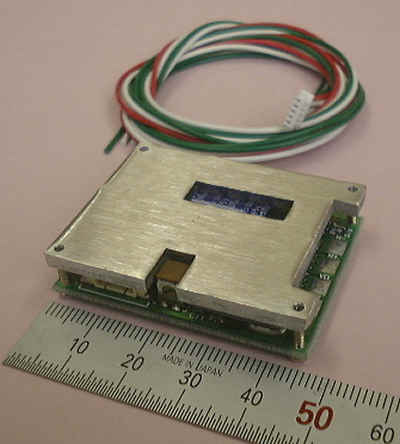
300 w type of PC-0143-2 titech robot driver在日本高校的机器人制作圈内比较流行,主要是它避免了重复研究人员重复发明轮子的问题。价格虽 然比较昂贵,但是还算稳定可靠,并且尺寸 小,易于放入机器人体内。最为重要的是,它非常易用,可以通过配置跳线,很方便的在电流控制,位置控制和速度控制3种不同的反馈模式之间切 换。 Quadlator II机器人的所有12个电机全部用titech robot driver控制,由于当时的数学模型,是一种运动学模型,最终的控制指令是各个关节的运动角速度,所以采用了速度控制,今天我回忆起来,觉得这个决策是有问题的,理论上的数学模型,距离现实的系统相差太远了。机器人这种复杂机电系统,最重要的是稳定性和可靠性。因为一旦机器人失控,那么后果是可怕的。如果你的计算机死机了,你最后的一招是什么呢?我想是关闭电源,你按下power按钮,计算机就算再疯狂也不能进一步为所欲为了。可是机器人呢?当一个用电池驱动的机器人,疯狂的挥舞着可怕的金属手臂,我想没有人敢上去关它的电源。它可能不计后果的摧毁周围的一切东西。而速度控制,一旦失控或者由于人为的失误使得整个系统进入正反馈,那么机器人身上的关节就会进行加速运动。 今天如果让我重新设计这个机器人,如果没有什么论文研究、理论突破的条条框框,而是纯粹为了设计一个满意的作品,就像史蒂夫乔布斯设计苹果电脑那样的心态,我也许会选择位置控制这样更加稳定的方案。八股化和职业化的科研只会制造更多的华而不实,理论是为了实际系统服务,而从来不应该本末倒置。 话题扯远了,现在说说速度控制下, titech robot driver到底如何工作。一图胜千言,我们看看速度控制闭环反馈回路的示意图: 速度反馈控制图 虽然这个图中有些多余的内容,但是基本能说明问题了。从图中看出,速度指令是一个-10V到正10V的电压信号,从P1口的1,2号针脚间输入进去,供电直流电源(或者电池)从P3接入,直流电机接在P2口上。为了防止干扰,图中还表明了屏蔽层。titech driver在内部进行PWM功率放大。这样粗略看上去,像是开环的感觉,其实titech driver内部有一个小闭环。真正的大闭环,要靠电机上的光电码盘,计数器换算成速度测量信号,然后反馈给cpu来实现,那是一个PID控制,我放到以后的内容再详细解释。 最后,我觉得国内制作机器人的爱好者,或者至少是高校圈内,也能搞出类似titech driver这样的东西来。我相信我们大学电类系的师生能力一定比日本人高。尤其是动手能力,我感觉是比绝大多数日本学生优秀的。可惜我们没有形成一个环 境,大家各自为战,重复做一些同样的开发,有些可惜。另外,日本的企业进行所谓的产学联合也起到了促进的作 用,这个titech driver基本上由冈崎产业(株)负责生产销售,而东工大的广濑研负责初步的研发。这个我觉得也值得我们 借鉴。 ===== |
共1条
1/1 1 跳转至页
Quadlator II--T.I.Tech Robot Driver驱动器,基本的反馈回路
只看楼主 1楼

关键词: Quadlator II--T.I.Tech Ro
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

