 包含原文中的第三章:动力驱动部件与运动方式设计,第四章:硬件电路设计 包含原文中的第三章:动力驱动部件与运动方式设计,第四章:硬件电路设计
足球机器人毕业论文2--动力驱动及硬件电路设计
第三章 动力驱动部件与运动方式设计
3.2.3 四轮移动配置和操舵方式
3轮机器人车体配置结构虽然简单,但稳定性差,遇到冲撞容易倾倒,与3轮相比,4轮稳定性更好。4轮典型配置有如下两种。
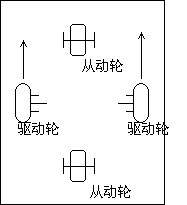
图3-9
如图组合为前后轮为万向脚轮,左右两轮为独立驱动轮,其自转中心于车体中心重合,适于在狭窄场地运行。其灵活性稳定性都比较好。其缺点是前后轮不能同时着地,加速前进时可能出现俯冲。
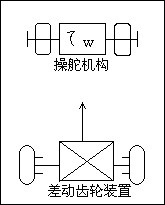
图3-10
该配置方式是常见的所谓汽车配置方式,车的稳定性较高。2个操舵轮需要同一个操舵机构协调转向,为了减少后轮摩擦损耗,配备了差动齿轮装置,增加了机构复杂性。
综合各种因素考虑,本设计采用图3-9所示的四轮配置方案。
第四章 硬件电路设计
引言
本章按照机器人系统结构模块,把本机器人分解为主控部分,传感器部分,AD转换部分,电源供电部分以及电机驱动部分。对每个部分的器件选用,主要功能以及各部分所组合成的总体系统作了分析介绍。
4.1 机器人系统结构
按照现代机器人理论,机器人分为机械手,环境,任务和控制器4个相互作用的部分。其系统结构图如下:
图4-1
在本设计中根据实际情况的需要,对以上模型进行了简化,得到以下的系统结构图:
图4-2
4.2 主控部分硬件电路
4.2.1 主控部分硬件――89C4051
本设计选用了ATL公司生产的89C4051单片机作为控制器。
AT89C51是一个含有4K可编程可擦写只读存储器的低功率高性能CMOS 8位单片机。该器件运用了Atmel公司的高密度不易丢失存储技术斌且兼容MCS-51工业标准的设置和管角输出。片内的闪存允许用系统内模式编程或传统的不易失程序编写器。由于集成了一个通用8位CPU和闪存,使得Atml的AT89C51成为一片具有高灵活性,可有效解决大多嵌入式控制应用的高性能单片机。
AT89C51支持如下标准特性:4K闪存,128字RAM,32条I/O线路,双16位定时/计数器,5V双电平中断机构,一个全双工串行口,片内震荡和时钟电路。综上,AT89C51 是按照静态逻辑操作停止到0频率设计的,并且支持两套由软件选择的功率存储模式。被空闲模式停止的CUP可有RAM,j定时/计数器,串口和中断系统使其继续运作。掉电模式用锁定振荡器停止一切芯片功能的方式存储RAM内的内容,直到下一次的硬件复位。
图4-3
4.2.2控制电路所应用到的端口功能介绍
- VCC:为点片机提供+5V主电源
- RST/Vpd:单片机复位引脚。单片机上电时,各存储器处于随机状态,在该引脚上输入两个周期高电平,使单片机复位。
- P1.0――P1.7:8个带内部上拉电阻的I/O口。其中P1.4――P1.7四个口用作接到L298的IN1――IN4,用作了对直流电机的驱动控制。另外,8个I/O口上都留有LED接口,这样可以通过程序将任何一个寄存器空间上的内容输出到P1口并由LED显示,方便了程序的调试和功能的扩展。
- P3.0:串行口,向AD转换器TLC1543的clock口输出时钟频率,用于控制AD转换的器串行传输的频率以及AD转换器的转换/读写周期的切换。
- P3.1:串行口,接TLC1543的ADRESS地址口,串行输出四位地址用以对AD转换器的9个模拟量输入口进行选通。
- P3.4:串行口,接TLC1543的DATA out口,用以接收经过AD转换后的8数字量
- P3.5:带上拉电阻的I/O口,接TLC1543的片选CS口,用于对AD转换器的转换/数据读取周期的控制。
- P3.2:带上拉电阻的I/O口,外部中断0的输入,用于碰撞开关的中断输入口。
- XTAL.1XTAL.2:借外部晶振的两条引脚。
- GND:地线。
4.2.3 89C4051线路连接图:
图4-4
4.3传感器部分硬件电路
4.3.1 找球传感器:
根据比赛用球为红外发射装置,故采用的传感器为红外接收的传感器,根据车体前方的两个红外传感器接收红外光输出电压不同比较来判断球的方位指导车体前进方向。
该红外接收器由一只光电三极管构成,其电路图如下:
图4-5A
当光电三极管接收到红外线信号时,其电阻减小,在管两端的电压分压减小,输出口电压上升,输入到AD转换芯片进行转换。
4.3.2 控球判传感器
控球判断传感器也是一只红外三极管,安装在控球探测臂上,感光方向为正下方(见第二章相关章节)其原理同上,因只需判断持球与否连个状态,所以不需要AD转换比较,输出量为数字量直接输入到单片机P1.3口进行判读。
4.3.3 进攻方向判断传感器
场地贴有按进攻黑白灰度渐变的基板帖纸,由两个位于车底的灰度传感器进行判断,当左右两个传感器值相等时,认为正对球门。灰度传感器由反射式红外光电判读器组成,即一个红外发光管和红外三极管并排绑定构成,其电路图如下
图4-5B
当地面灰度变化时,对红外光的反射量随之变化,白色对红外光反射力强,输出电压高;黑色对红外光吸收力强,输出低电压。
4.3.4 碰撞传感器
当机器人与墙体发生碰撞时,装于持球检测臂上部的微动开关会被按下,导致一个中断脉冲,使机器人进入中断处理程序――倒退,转向,避开障碍。由于碰撞开关安装高度大于球的直径,不会造成球碰到碰撞开关而造成误操作。
碰撞传感器线路图见89C4051线路图,其中的电容C4电阻R3起到对碰撞信号稳定延迟的作用,使单片机能接收到一个可靠的中断信号。
4.4AD转换部分硬件电路
4.4.1AD转换芯片的选用――TLC1543
AD转换器自用在于把接收到的红外线电压模拟信号转换成可被单片机计算比较的数字信号。其类型有积分型,逐次比较型等等。针对本设计,所选用的是20管脚的单片机89C4051,其并行输入口有限,并已用于驱动电机控制。而TLC1543的模拟端口地址输入和数字量输出都用串行口,这样大大节省了I/O口资源。虽然串行通讯速度慢于并行通讯,但对于本设计,串口速度远高于机器人反应速度,可以满足需要。另外,该AD转换器有11个模拟量输入口,为今后的功能扩展留下很大空间。
图4-6
4.4.2TLC1543与单片机的电路连接
图4-7
4.4.3所用到的管脚功能介绍
- ADDRESS:串行输入地址端口,通过4位的串行地址选择需要的模拟量端口。
- Vcc:芯片工作正电压。
- REF+:高参考电压值(通常是Vcc)输入到该管脚,其最大输入电压取决于该管脚与REF-管脚上的电压差值。
- REF-:低参考电压(通常接地)。
- CS:片选信号。该位上一次由高到低的跳变将复位内部计数器和控制器,并使能DATA OUT和ADDRESS,并且I/O CLOCK在最大建立时间内加两个下降沿到内部系统时钟。一次由低到高的跳变将禁止DATAOUT和ADDRESS,同样的加两个下降沿到内部时钟。
- DATA OUT:三态串行输出口用于输出AD转换的结果。当CS高时DATAOUT被置为高阻态,CS低时被置为可用状态。
vI/O CLOCK:输入输出时钟。该管脚接受串行输入的时钟信号,并执行4种功能。
1、前4个周期在ADDRESS上接收4位地址信号。
2、接下来几个周期,被选中的模拟量端口电压进入AD转换器的电容阵列。
3、把前一周期所选中的模拟端口转换结果从DATA OUT输出。
4、在第十个下降沿控制内部控制器,使之开始转换。
- EOC:结束转换信号。在第十个时钟周期该由高跳到低并保持,直到转换结束为止。
- GND:接地端。
4.5 电源供应部分
4.5.1稳压块选用
本系统所有芯片都需要+5V的工作电压,而干电池足能提供的电压为1.5V的倍数的电压,并且随着使用时间的延长,其电压会逐渐下降,想要得到稳定的+5V工作电压,则需要L7805稳压芯片。
图4-8
4.5.2 电源选择
虽然微处理器和微控制器不需要支持电路,功耗也很低,但必须要加以考虑。
?单电池组:用一组电池同时给控制电路和驱动电机供电。可以使机器人的重量减轻,成本降低。
?双电池组:用两组电池分别给控制电路和驱动电机供电,可减少电机开关时的能量波动。
本设计才用双电池供电模式,四节AA1.5V碱性电池用于控制芯片供电,一节9V电池用于驱动电机供电。
4.6 电机的驱动与控制
4.6.1 直流H桥集成功放电路驱动原理
直流H桥功放电路是用于控制直流电机双向运动的基本电路,该电路使电机在单电源供电下可以双向运转。
图示电路为用三极管构成的H桥集成功放电路基本形式。为使电机顺时针转,应接通三极管A和D,对电机而言,其电压右负左正,通过改变不同的三极管导通状况,可改变电机两端电压,达到反转目的。
图4-9
4.6.2 L298双通道直流电机驱动芯片
L298驱动芯片是性能优越的小型直流电机驱动芯片之一。它可被用来驱动两个直流电机或者是双极性步进电机。在6――46V的电压下,可以提供2A的额定电流。L298还有过热自动关断功能,并有反馈电流检测功能。
为保证L298正常工作,建议加装片外续流二极管。
图4-10
L298驱动双电机的电路连接图:
图4-11
电机控制逻辑:
4.7 硬件连接总图
图4-12
=====================================================
第一部分:足球机器人毕业论文1--总体设计
第二部分:足球机器人毕业论文2--动力驱动及硬件电路设计
第三部分:足球机器人毕业论文3-- 软件程序设计
参加讨论: 我的毕业设计--足球机器人
|

 我要赚赏金打赏帖
我要赚赏金打赏帖 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

