
| GoRo围棋机器人 写于: 星期六 02 四月 @ 08:27:47 |
 GoRo围棋机器人
---------------------------------------------------------------------------------------------------------- (点击图片可以打开大图)
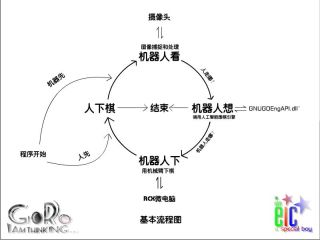
GoRo系统结构 GoRo总装图
棋子移动结构
软件界面
编程截图
用MLCAD设计机械部分
改进图像识别算法
不同光线下的图像
图像分析
用NQC编写RCX的程序 GoRo有两种下棋模式,你和它下棋,他自己和自己下棋。 代码分四部分: ---------------------------------------------------------------------------------------------------------- ../GoRo_VB/ Position.ini 识别时每个点的位置信息 ../GoRoNQC/ ../GoRoRePos/ 源代码下载(3.7M,需要很长时间) 控件下载(4.3M,需要很长时间) ----------------------------------------------------------------------------------------------------------参考文献: 《Visual C++ 程序设计 --VB 程序员指南》("Visual C++ for Visual Basic Developers") Author: (U.S.) Bill Locke Translated : 肖国尊 王琪 郭卫风 等译 Presser: 机械工业出版社
《程序员修炼之道》 ("The Pragmatic Programmer") (Eic G.建议读这本书,做robot的也应读) 《Visual BASIC 计算机绘图实用技术》 《21天学通C语言》 ("Teach Yourself C in 21 Days") 《Visual Basic 应用技巧与常见问题》 《机器人探索-工程实践指南》(Robotic Explorations - A Hands-on Introduction to Engineering) 《乐高组件和ROBOLABTM在工程学中的应用》(Thanks Mr. Song) 《Qbasic语言程序设计教程》 做这个机器人对我来说是一次挑战,因为我从来没有做过这样的东西,这方面的知识也很少。但是我慢慢的体会到不会的东西可以去学,不懂的东西就自己把它搞懂,不知道的东西就去了解,去查。一切都要靠自己,不要想着会有人来帮你。这样的思想让我学到了很多的东西,我很高兴。 好的开始是成功的一半。(方法很重要) 你不应该局限与任何特定的技术,而是应该拥有足够广博的背景和经验基础,以让你能在特定情况下选择好的解决方案。你的背景源自对计算机科学的基本原理的理解,而你的经验来自广泛的实际项目。理论与实践的结合使你强大起来。 我们,采集的只是石头,却必须时刻展望未来的大教堂。 ――――采石工人的信条 了不起的草坪需要每天给予一点关心,了不起的程序员也是这样。每天为提炼你所拥有的技能而工作,为把新的工具增加到你的技能列表而工作。几年之后,你将会惊奇你的经验得到了怎样的发展,你的技能得到了怎样的提升。 在所有的弱点中,最大的弱点就是害怕弱点。―J.B.Bossuet, Politics from Holy Writ(圣经),1709 我们可以为我们的能力自豪,但对于我们的缺点――还有我们的无知和我们的错误――我们必须诚实。 责任是你主动担负的东西。你承诺确保某件事正确完成,但你不一定能直接控制事情的每一个方面。 ----------------------------------------------------------------------------------------------------------
参加讨论: |
共1条
1/1 1 跳转至页
GoRo围棋机器人
只看楼主 1楼













关键词: 围棋 机器人 模块
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
| 「AI编程记录--含源码」用一晚上的时间写一个esp32的示波器被打赏¥19元 | |
| STM32C0116DK开发探索记(3)被打赏¥30元 | |
| STM32C0116DK开发探索记(2)被打赏¥24元 | |
| STM32C0116DK开发探索记(1)被打赏¥29元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

