 在设计制作双臂机器人不到一年,上海交大Googol推出了他的双足机器人――双足溜冰机器人,这里给出详细的技术资料。 在设计制作双臂机器人不到一年,上海交大Googol推出了他的双足机器人――双足溜冰机器人,这里给出详细的技术资料。
 (溜冰版) (溜冰版) (步行版) (步行版)
双足溜冰机器人
机器人开发代号:CASPER ― 00
开发人:徐振华(GOOGOL)
导师: 吕恬生
作者的另一个作品:双臂机器人
第一章 前言
1.1 拟人机器人概述
拟人机器人是机构学、运动学、控制理论等学科发展水平的综合体现,是当前国内外研究的热点问题之一,今天机器人技术正在走出制造车间步入人们的日常生活空间,崭新的机器人工业曙光初现,世纪之交,由于更多的公司和科研机构加入到这个行业中来,使得双足行走拟人机器人的进步更加的迅速。
索尼在1999年推出“宠物”机器人Aibo之后又于2000年11月推出了拟人的机器人SDR-3X。而不久后推出的SDR-4X据称比第一代在性能上有了很大提高。
本田公司则从1986年起就开始研究两足行走技术,2000年11月该公司宣布推出名为Asimo的行走机器人,标志着本田在机器人研究领域竖起了第一块里程碑。今年初,本田公司开始将Asimo出租给其他公司以及像博物馆这样的公共设施。

图 1.1 本田公司的拟人机器人
1.1.1 双足行走机器人
双足行走机器人是人体行走过程包括髋关节、膝关节和踝关节的连续运动,主要是串联起来动作。机器人双足行走技术用钢结构代替骨头,并用执行机械装置代替肌肉来重现人体的运动,但由于一个关节上可以连接多块肌肉,真人在运动时也具有并行动作的机理。
目前研究人员正在研究双足行走的各种途径和方法,基于零力矩点控制(ZMP)的行走控制技术就得到了广泛的研究。本田公司的Asimo和索尼公司的SDR-3X/4X都采用了ZMP控制技术,但还存在其它更有效地创造稳定安全行走的新方法。
1.1.2 多足溜冰机器人
多足溜冰机器人是一种基于多足行走机器人上的新的运动方式,典型的足数为3,4,6,8。同多足行走机器人一样,由于是多足,对环境有着良好的适应性,重心控制的问题相对单足,两足较为简单,但起步态规划有着一定的难度,多足之间的干涉也是问题,但就作为溜冰机器人而言,其平稳性是非常优秀的。
1.2 双足溜冰机器人
双足溜冰机器人是基于双足机器人的结构而衍生出来的另一种行进方式,结构上与双足步行机器人相差无几,就像人脚穿上溜冰鞋一样,在前进的效率上比步行更高,但只适合于平坦的路面,从步态上讲,又是一种全新的步态规划,对重心的控制也有别于双足步行机器人,国内外在溜冰机器人的步态上的研究还不多,有部分机器人是基于四足的步态研究,所以重心控制的问题并不是很突出,而两足的溜冰机器人步态和重心调整问题是一大难点,所以作为一种在双足机器人上新的应用,有很大的研究意义。
 |
 |
|
溜冰版(点击看大图)
|
步行版(点击看大图)
|
图 1.2 双足机器人外观 双足机器人外观
第二章 硬件规范
2.1 机械规范
机械结构是机器人设计的基础,其设计的好坏直接影响到以后的运动控制效果和机器人整体运动特性。包括以下内容:
1) 结构原理图:结构原理图的设计将关系到每关节的运动范围,端点运动线速度,机器人的转弯半径,电机的驱动力矩。
2) 自由度设计:这将关系到机器人的灵活程度,及可能完成的动作复杂程度,并且将影响到空间方程的求解个数,达到同一控制位置的方式数量
3) 关节运动幅度:这个量将决定机器人的运动幅度,过多的运动角度无疑是一种浪费,并且将加重电机的负担,过小的运动幅度不利于机器人运动时动作的展开,电机的扭矩浪费。
4) 驱动原设计:这一项也是非常的重要,根据前面的自由度设计,运动幅度设计,可以确定出电机所需的扭矩,其次,驱动原的控制方式类型也将会影响到的这个控制系统的设计,所以对常用的伺服,步进等驱动方式应该充分分析,然后确定所选用的电机控制方式,当然电机的效率也是值得考虑的重要因素之一,这也将影响机器人的运动特性。
全高:450mm
关节有效力矩点距离:300mm
小腿有效力矩点距离:150mm
大腿有效力矩点距离:150mm
机身全重:3.1kg
控制系统重:0.6kg
有效自由度:12 DOF
关节平均活动范围:40度
图 2.1溜冰机器人的原理图
2.2 制作流程
这次的制作流程较为麻烦,主要因为有很多器件不一定能订到,导致制作中小修改不断,又是不得不借助手工的方法来修正。但使用CAD的手段对设计还是有帮助的
结构原理图设计>>>自由度分析>>>驱动单元选型>>>分析驱动单元外形>>>草绘主基本件>>>虚拟驱动单元外形(PRO/E)>>>电脑设计部分结构基本件(PRO/E)>>>手工修正>>>主基本件加工(部分)>>>将实际零件重回电脑修正>>>设计辅助基本件(PRO/E)>>>手工修正>>>副基本件加工>>>部分组装>>>回电脑修正>>>散件设计(PRO/E)>>>加工>>>最后组装
2.3 机械设计,装配
使用软件:PRO/E 2003
辅助设计
|
舵机的模型(点击看大图)
|

舵机的实物(点击看大图)
|
|
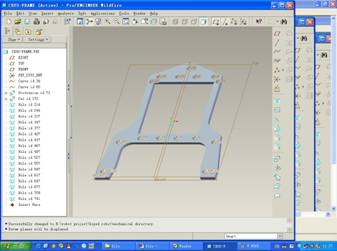
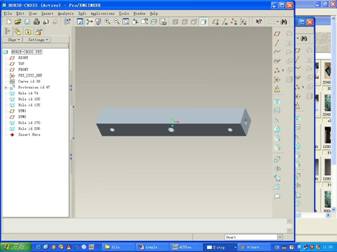
安装架(点击看大图)
|
脚底(点击看大图)
|
|
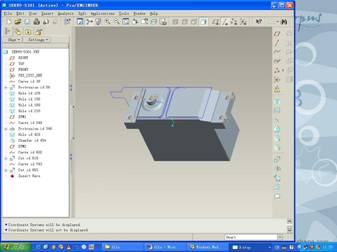
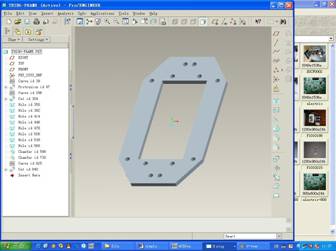
关节总成(点击看大图)
|
舵机安装架(点击看大图)
|
|
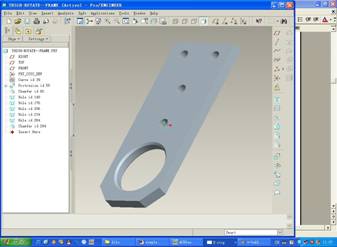
轴承架(点击看大图)
|
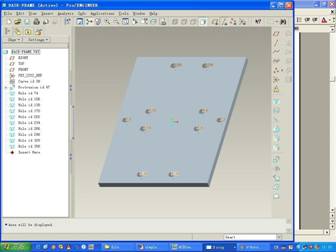
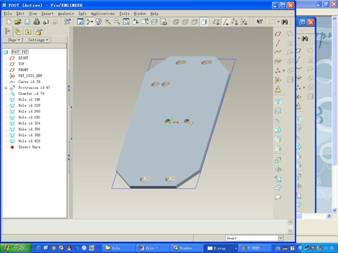
底板(点击看大图)
|
|
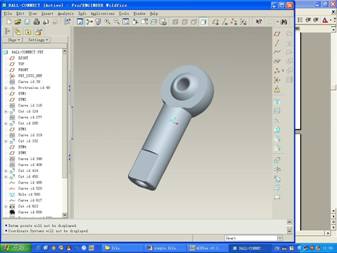
虚拟球关节(装配用,点击看大图)
|

球关节(实物)
|
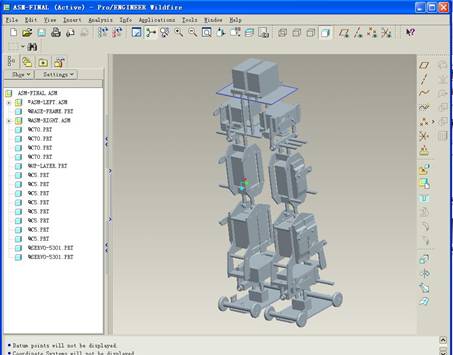
虚拟装配(部分细节省略,点击看大图)
|
|
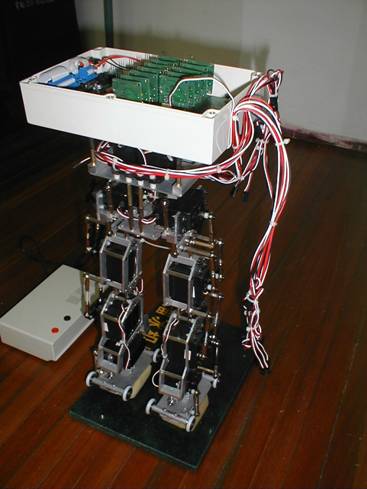
实物图
机器人运动轨迹一
机器人运动轨迹二
|
2.4 控制系统硬件
控制系统将关系到机器人整体运行情况,也是步态规划运动算法的基础和平台,控制系统中的反馈设计将关系到后面的编程算法,也将对整个机器人的数学模型产生影响。包含的内容如下:
1) 控制系统方框图:控制系统框图决定了这个系统的基本框架,反馈系统设计也将包含其中,并且控制框图将决定整个系统的运行状况和编程指令的设计
2) 硬件原理图设计:硬件原理图是将控制系统具体化的第一步,其设计影响到系统的扩展性和可靠性。
3) 可靠性分析:在硬件原理图设计完后,对其可靠性进行分析,改进,使得系统在理论上区域稳定,同时在原理图上应设计辅助稳定电路。
4) 扩展性分析设计:扩展性的分析优先级低于可靠性分析,但对于日后系统的升级及额外自由度的增加有很大影响。
指令设计:由于机器人的自由度增多,控制难度增加,所以应设计一套较为高效的指令为其编程,这样使整个系统便于管理和控制,同时指令的效率也将直接影响到机器人的运行效率。
主控:MCU--aduc812
相关数据:
8 BIT MCU
11.0592Mhz CLOCK
ICP
ALL PORT PROGRAMABLE
WATCHING DOG
RESET PHOTO COUPLER
MULTI POWER PORT SUPPELY
LED DISPLAY
ON BOARD BUTTOM INTERMIT
8BIT ON BOARD DIGITAL INPUT(BOTTOM)
OVERLOADING PROTECTION
256 Byte ON-CHIP DATA RAM
8K ON-CHIP PROGRAM FLASH
640Byte DATA FLASH
16M BYTE EXTERNAL DATA ADDRESS SPACE
64K Byte EXTERNAL PROGRAM ADDRESS SPACE
21 PROGRAMMMABLE I/O LINES
I2C,SPI
POWER SUPPLY MONITOR
52PIN TQFP
副控:CPLD--ISPLSI-1032E
相关数据:
TYPICAL ISPLSI 1032E-70LJ
6000 PLD GATES
64 I/O CELL
192 REGISTERS
32 GLB
84PIN PLCC
IO数量:20个
以开发IO数量:12个
舵机控制模块:89C4051
驱动单元:舵机FUTBA 5301(7.18 V),FUTBA 3801(7.18 V)
相关数据:
Voltage: 6V(这是测试电压,实际使用电压7.18 V,扭矩上浮)
Product: Futba S5301/Futba S3801
Test data :2003-12-22
A电源方案: 220V(AC)~~7.18V , 20A(DC)开关电源
B电源方案: 镍镉电池
运动界限: A电源方案〉〉〉2小时(温度原因) B电源方案〉〉〉在测。。。
2.5 控制系统照片
|

舵机
|
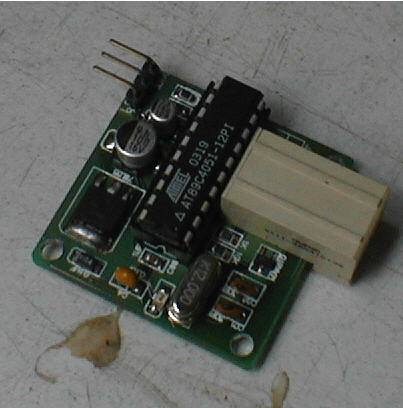
舵机控制模块
|

系统控制板(点击看大图)
2.6 底层软件系统
系统反馈框图
目前机器人系统是一个半闭环的绝对位置反馈系统,青色部分的闭环反馈目前还没有完成。
系统框图
硬件连接定义
--MCU――〉DRIVER SLOT
--P1.0---P1.7――〉D0---D7 SERVO DRIVER CONTROL DATA INPUT
--MCU――〉CPLD
--P3.7――〉CPLD RST
--P2.0---P2.7――〉IO22---IO29 FUNCTION DATA INPUT PORT
--CPLD――〉DRIVER SLOT
--IO0---IO7――〉RST00---RST07 RST SERVO DRIVER(00-07)
--IO10---IO21――〉RST08---RST19 RST SERVO DRIVER(08-19)
--IO30---IO49――〉CS00---CS19 SELECT SERVO DRIVER(00-19)
--IO50---IO61――〉TP00---TP11 TEMP PIN
--IO8――〉CLOCK0
--IO9――〉CLOCK1
--IO62――〉P3.2
--IO63――〉P3.3
--MCU――〉J000
--P3.2――〉1
--P3.3――〉2
--P3.4――〉3
--P3.5――〉4
--P3.6――〉5
--P3.7(CPLD RST)――〉6
Programmed Function configuration (MCU to CPLD)
简写为MTC指令,MTC指令主要用于系统的各项功能编程,服务于MCU和CPLD之间,通讯方式为8BIT的并行传输方式,共允许256条有效指令,目前开发14条,主要功能有:对单个或多个的单片机进行复位初始化,对单片机的使能端进行操作
P2.0---p2.7>>>IO22---IO29
CODE|||| FUNCTION
0x00 |||| RST ALL SDS
0x20 |||| DISABLE ALL SDS
0x21 |||| CS00 (SDS ENABLE)
0x22 |||| CS01 (SDS ENABLE)
0x23 |||| CS02 (SDS ENABLE)
0x24 |||| CS03 (SDS ENABLE)
0x25 |||| CS04 (SDS ENABLE)
0x26 |||| CS05 (SDS ENABLE)
0x27 |||| CS06 (SDS ENABLE)
0x28 |||| CS07 (SDS ENABLE)
0x29 |||| CS08 (SDS ENABLE)
0x2A |||| CS09 (SDS ENABLE)
0x2B |||| CS10 (SDS ENABLE)
0x2C |||| CS11 (SDS ENABLE)
0x2D |||| CS12 (SDS ENABLE)
0x2E |||| CS13 (SDS ENABLE)
0x2F |||| CS14 (SDS ENABLE)
0x30 |||| CS15 (SDS ENABLE)
0x31 |||| CS16 (SDS ENABLE)
0x32 |||| CS17 (SDS ENABLE)
0x33 |||| CS18 (SDS ENABLE)
0x34 |||| CS19 (SDS ENABLE)
Servo data configuration (MCU to Servo Driver Slot)
简写为MTS指令,其中Servo Driver Slot简称为SDS,既舵机的驱动,MTS指令主要用于对舵机的位置进行控制,由8 BIT的并行数据进行传输,共有256个细分位置。
SERVO的绝对位置程序代码同时受到位置安排的约束,下图为关节的轴定义和排布
第三章 进展
3.1 目前进展
机器人已能完成双脚不离地时的基本溜冰步伐,电源为外接
目前正在改进溜冰的步态,使其更加优美,并将提高成功率和前进效率
新的机载电源正在更换中
行走步态正在编写中,部分机构和控制可能够需要修正
3.2 发展方向
基本上这台机器人作为实验机型,主要作为机械结构的考证,基本程序的编写测试平台。并且不准备加上半身,只准备双腿进行一些基本的研究,如同上一次的双臂机器人,只对上半身进行考证测试。
第四章 附录
舵机相关:
FUTABA 大型モデル用サ―ボ
S5301
Speed:0.23sec/60度
Torque:21.0 kg-cm
Size: 59.2*28.8*49.8 mm
Weight:125g
材料:
LY-12
万向球接为铁质,内镶铜套,3mm安装孔
电源:
复旦电源220V(AC)~~7.2V , 20A(DC)开关电源
镍镉电源:5000ma/h,1.2v每单元(共6单元)
编程语言:C,ASM
编程软件:Keil C 7
机械制图:Pro/E Wildfire 2003
提供录像:基本步态溜冰
感谢:
特别感谢我的父亲在制作过程的指导协助。
还有吕恬生教授,工程中心的老师,硕士,博士,ROBOT TEAM的Charlesqian,panda,dudu,robobbg,guapeng,caffee等一群伙伴们。(没提到名字的别打我啊 ^_^!! )
注:机器人的细节由于篇幅不再详细列出。有兴趣的朋友可以多多交流。
作者的另一个作品:双臂机器人
参加讨论: phpbb2/viewtopic.php?p=16645#16645
感谢本机器人作者徐振华(GOOGOL)提供本文,版权归原作者所有。
|













 我要赚赏金打赏帖
我要赚赏金打赏帖 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

