上海交通大学第四届工程问题挑战赛――步行机器人大赛

上海交通大学步行机器人大赛作品精选
写于: 星期六 22 十一月 @ 03:46:18 |
| |
 这里精选了上海交通大学第四届工程问题挑战赛――步行机器人大赛的作品,希望对做步行机器人的人带来一些灵感和启发! 这里精选了上海交通大学第四届工程问题挑战赛――步行机器人大赛的作品,希望对做步行机器人的人带来一些灵感和启发!

上海交通大学步行机器人大赛作品选
大赛简介:
全称:上海交通大学第四届工程问题挑战赛――步行机器人大赛
主办单位:
机械与动力工程学院
协办单位:
上海交通大学教务处
上海交通大学学生处勤工助学办公室
上海交通大学科创中心
承办单位: 上海交通大学创新协会
作品精选:
|
作品图片(点击可以看大图)
|
技术特点 |

|
一般说来,两足步行机器人的各个关节的协调运动都是通过一定的逻辑电路来实现的,如单片机,PLC等等。但我们小组想打破这一常规,制造一个纯粹用机械结构来实现各个关节协调运动的两足步行机器人。 我们采用了两足步行的方式,两腿交替摆动,同时配重机构做同步的左右移动,使机器人的重心交替落在左右脚上。这样左右脚就交替着支撑身体使机器人迈步使其向前行走。这样就使其与人类行走方式极其想像。 |

|
主体部分由滚珠丝杠和支撑体组成。机械部分由连轴器连接电机与主体部分构成。常见电气零件通过电路设计实现了电机的正反转周期性切换,带动装配于滚珠丝杠上滑块所联接的机器腿与主体向前交替移动,实现前行。同时,主体两侧两个双摇杆机构之间的一副连杆使机器腿完全同步,保证了机器人的平稳前行。 |

|
机器人主体材料为ABS硬化塑料;腿部由铝合金构成。他依靠组合齿轮传动,其动力方式为双马达分别驱动呈上下三角形分布的六条腿,使成上下周期运动。借助腿部底端不同方向的切口,产生同一方向的前进动力。 外观: Spider-Ⅱ是我们为蜘蛛侠配置的新坐骑。依靠其强健的六足,无论平地、斜坡都有非凡的表现,是蜘蛛侠如虎添翼,勇往直前。 |
|
机构主体由一个低速直流电机、一组内部传动齿轮、一组外部传动齿轮和两组曲柄组成。其中,直流电机负责驱动,该电机带动主轴,通过曲柄输出两个在相位上相差180度的转动。再由三个一组的传动齿轮保证两组曲柄转动的同步性,使腿部在y轴向保持垂直的情况下,整体随曲柄作圆周运动,以达到两端交替迈进的目的。行走中采用单腿支撑形式,每条腿独立支撑整个机构,,以钢丝弯折成的两条平行线平面作为支持面,结构稳定。 |

|
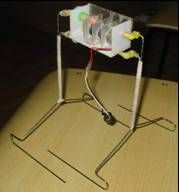
双足步行机器人由高速小功率马达为原动力,经过减速装置带动两组曲柄摇杆机构,达到大约每分钟30步的步行速度。具体说,机器人的腿是曲柄,通过连杆将运动传给手,手作摇杆运动,这样与人的行走姿势较相似。减速装置为由轮系组成的减速箱。轮系传动平稳,四连杆机构制造简单,低幅接触耐用,且易润滑。 |

|
我们模仿毛毛虫的特点设计了这个二足机器人,具有简单而稳定性高的特点,以最简洁可靠的机构来完成复杂的步行运动。机器人各装置一条前腿和一条后腿,连续做一张一合的运动。每条腿上装一个可以制动轮子接触地面。当两腿合拢时,后腿上的轮子可动,前腿的锁住,后腿就向前移;当两腿分开时,后腿轮子锁住,前腿轮子可动,前腿就向前移。这样的不断运行,使机器人向前行走。 |

|
本体采用双夹板结构,可获得较大的组装空间和较轻的重量,电机悬挂安装于其中,经减速后,从机器人中部出轴,带动两个夹角为180度的曲柄,再经过减震气缸后,带动四连干机构,产生前进的运动轨迹,使机器人前进,机器人两脚的底部装有转向电机,利用反作用的原理是机器人旋转,从而完成转弯的动作。机器人采用的电机是12V直流的高扭矩电机经一级涡轮减速后输出,从而使机器人可以爬上比赛中要求的经过的斜坡。 |

|
本机器人使用了四连杆机构,六条腿分布于机器人身体两侧,分为中间的一对主动腿和前后两对从动腿。通过24V的直流电机,带动同步带,再驱动中间的两条主动腿,主动腿通过连杆机构传动,使前后四条腿协同运动。该六足机器人能够完成预定的直线行走和爬坡(最大爬坡角15度)。其设计思路新颖、机构简洁、自重轻、行走稳定、成本低、制作简单,得到了评委和专家的肯定和好评,并最后在这次比赛中脱颖而出。 |

|
采用曲柄连杆的设计、八足、单电机、涡轮涡杆传动,带有一个简单的转向机构、遥控、电源内置。八足采用左右对称布置,四足一组,相位差为180o的安装方式。利用连杆一端椭圆形运动轨迹的下半程作为有效的运动程。两组****替着地,使整机向前运动。其输出减速方式采用涡轮涡杆,结构简单,减速比大,效率较高。使用单涡杆、四涡轮、四轴输出驱动四对足。 |
|
关键词:
上海
交通大学
第四届
工程
问题
挑战赛
步行










 我要赚赏金打赏帖
我要赚赏金打赏帖 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

