
| 使用嵌入式RTLinux OS组建机器人控制系统(1) 写于: 星期三 01 十月 @ 04:49:00 |
 使用嵌入式RTLinux OS组建机器人控制系统 全文介绍: 这是由在读于Tokyo Institute of Technology的博士生Liu Xinyu写的一篇文章,文章以机器人Quadlator II为实例,详细描述了如何使用嵌入式RTLinux OS组建机器人控制系统。全文一共分为7章。 第一章: assemble the basic parts and run it, access it via wireless LAN. 本网站很荣幸得到Liu Xinyu的授权,转载他的杰作,文章中所有的文字和图片版权均为原作者所有。 Quadlator II:
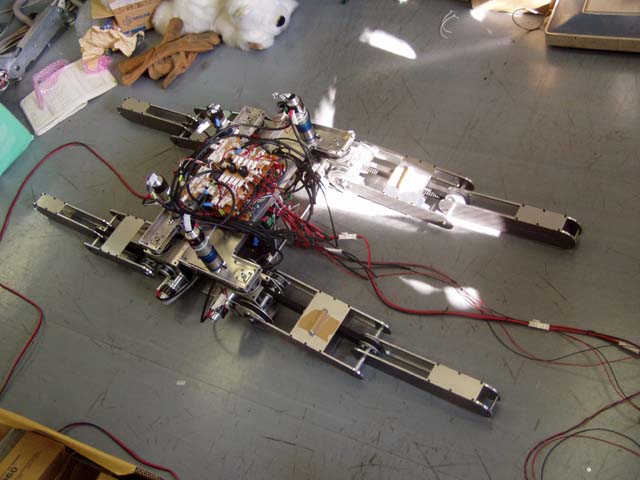
Fig. 1 Robot Quadlator II Lay-down
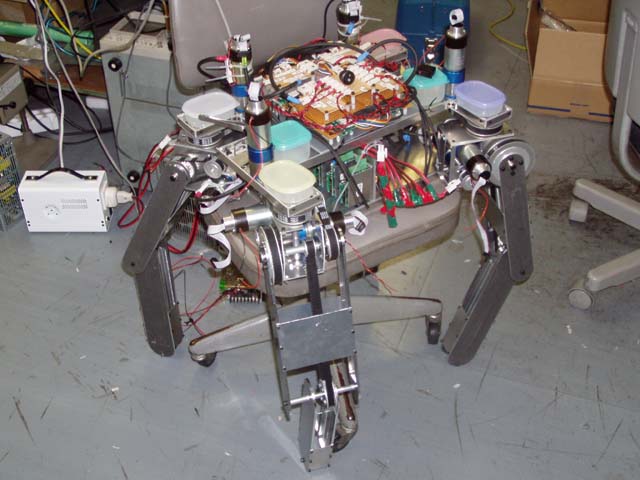
Fig. 2 Robot Quadlator I stand up before walking
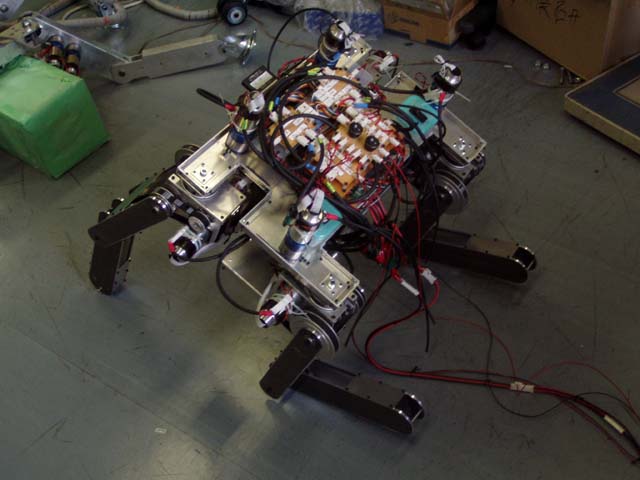
Fig. 3 Robot Quadlator II during construction
Fig. 4 Quadlator II stand on the knee About Quadlator II Quadlator II will be OK soon. It comes from his older one, Quadlator I, which build about 1996 as I know. For these long years till 2003, it did not change although the technology in electronics and computer develops so fast. the new design started about May, 2003, on June 27th, a paper like 'I have a dream of such a robot....' was submit. but it still nothing. After a month I got the titech-wire embed system, CPU, DA and DIO modules. I tried many things, but failed, even using the samples in the CD-ROM with titech-wire. I got a sample program written by E.Fukushima @ hirose Lab. T.I.Tech it works. from July 6th to July 22, I enjoyed my summer vocation. when I came back to Japan, I got the latest version of titech-wire sample program updated by E. Fukushima. Here I find a new problem. The sample program is written in C++. The titech-wire is installed with RTLinux 2.2.18-rtl. but FSMLABS( The company who makes RTLinux) only provides RT-Linux 3.2/Pre for download. I tried to compile the sample programs. In user-space it is ok. but failed in Kernel-space, because of C++ is not supported. I rewrite the sample program by pure ANSI-C as a driver. but I found the RT-Linux Kernel not support for dynamic memory allocation, even I used kmalloc() or kfree(). there is no other way to write the program by only using the static memory. The last problem I met is about compiling. the program compiled under my RT-Linux 3.2/pre with Linux Kernel ver. 2.2.40 can not loaded in the 2.2.18-kernel, even I used insmod -f command. I tried to compile the program under RT-Linux 3.1/Pre with linux kernel 2.2.19. this time insmod -f works! Now, there is nothing block me, I wrote my control program, made the 12 motors rotate as I need. and the robot works well now. I will also point out some failure of Quadlator II,
参加讨论: |
共1条
1/1 1 跳转至页
使用嵌入式RTLinux OS组建机器人控制系统(1)
只看楼主 1楼

关键词: 使用 嵌入式 RTLinux 组建 机器人 控制系
共1条
1/1 1 跳转至页
回复
 我要赚赏金打赏帖 我要赚赏金打赏帖 |
|
|---|---|
| 【S32K3XX】FlexCAN 模块配置使用被打赏¥30元 | |
| 【S32K3XX】FlexCAN RAM 资源分配整理被打赏¥25元 | |
| 【S32K3XX】IPCF 适配核间中断处理被打赏¥21元 | |
| 【S32K3XX】IPCF 核间通讯模块UNMANAGED方式使用被打赏¥29元 | |
| 片外存储Flash使用方法(Arduino IDE环境)被打赏¥22元 | |
| 三分钟快速上手ESP-NOW(ArduinoIDE环境)被打赏¥23元 | |
| 【S32K3XX】LPSPI参数配置说明被打赏¥21元 | |
| 在WT9932C61-TINY上实现超声波测距被打赏¥22元 | |
| 基于WT9932C61-TINY的环境构建及OLED屏驱动测试被打赏¥20元 | |
| 【S32K3XX】Core-to-Core 中断使用被打赏¥21元 | |
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

