
| 简易自动入库小车 Contributed by Anonymous on: 星期二 05 十二月 @ 21:20:43 |
 以AT89S52单片机作为微控制器,设计出一种简易自动入库小车,通过红外传感器检测黑带信号,利用单片机输出PWM脉冲控制舵机和减速直流电机的转向和转速,使小车按预先设计好的路线安全的停入车库,并且能按设计要求自动退出车库。 以AT89S52单片机作为微控制器,设计出一种简易自动入库小车,通过红外传感器检测黑带信号,利用单片机输出PWM脉冲控制舵机和减速直流电机的转向和转速,使小车按预先设计好的路线安全的停入车库,并且能按设计要求自动退出车库。关键词:AT89S52;舵机控制;红外传感器检测电路;PWM脉宽调节。 简易自动入库小车 肖忠良 肖红军 王楷 (哈尔滨工程大学 自动化学院,哈尔滨 050001) 摘要: 以AT89S52单片机作为微控制器,设计出一种简易自动入库小车,通过红外传感器检测黑带信号,利用单片机输出PWM脉冲控制舵机和减速直流电机的转向和转速,使小车按预先设计好的路线安全的停入车库,并且能按设计要求自动退出车库。 关键词: AT89S52;舵机控制;红外传感器检测电路;PWM脉宽调节0 引言 本课题重点在于控制小车行驶的速度、黑带检测、转弯的精度以及对铁片的检测。难点在于协调好小车行驶速度与转弯之间的关系,这样才能保证小车在行驶过程中不越界。本设计可以应用于工厂的自动化管理,实现过车间之间货物的传送;还可以对其进行功能扩充(例如增加超声波传感器,使其具有测距和避障功能),将其应用于无人驾驶等。 1 设计方案与论证采用ATMEL公司生产的AT89S52型单片机作为我们的控制单元,因为该型单片机价格便宜,功能比较强大,性价比高,而且在市场上很容易买到。通过红外传感器、电感式接触开关等器件来采集各类信息,送入主控单元单片机,处理数据后完成相应动作,以达到自身控制。其中寻迹(黑带检测)采用市面上通用的发射管及接收头,经过单片机调制后发射。铁片检测采用电感式接近开关LJ18A3-8- Z/BX检测。此系统比较灵活,更重要的是采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现,能很好地满足题目的要求。 黑带寻迹采用红外线发射和接受原理。铁片检测采用电感式接近开关LJ18A3-8-Z/BX检测,产生的高低电平信号经过处理后控制小车停转,完成进入车库的任务。此系统比较灵活,采用软件方法来解决复杂的硬件电路部分,使系统硬件简洁化,各类功能易于实现。 2.系统硬件设计2.1 系统总体设计 采用AT89S52单片机作为小车的控制单元。在小车的前端接八路红外传感器
黑带检测方案选择 方案一:采用发光二极管发光,用光敏二极管接收。其电路图如图2所示。 当发光二极管发出的可见光照射到黑带时,光线被黑带吸收,光敏二极管为检测到信号,呈高阻抗,使输出端为低电平。当发光二极管发出的可见光照射到地面时,它发出的可见光反射回来被光敏二极管检测到,其阻抗迅速降低,此时输出端为高电平。但是由于光敏二极管受环境中可见光影响较大,电路的稳定性很差。 方案二:采用光敏电阻接受可见光检测。其电路图如图3。 该电路采用T性网络,可避免使用太大的反馈电阻,并且便于提高输入阻抗。六组光敏电阻用于检测可见光信号。但光敏电阻检测到黑带时,输出端为低电平,但用光是电路输出端显示为高电平,信号返回给单片机,通过单片机控制前轮的转向。但由于需要正负电源,同时光敏电阻易受环境影响,稳定性也很差。
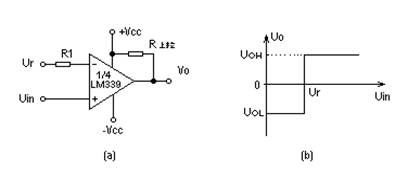
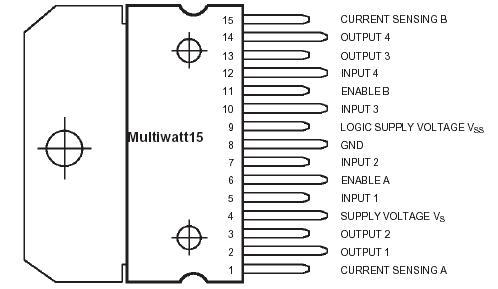
图3 光敏电阻检测黑带 方案三:利用红外线发射管发射红外线,红外线二极管进行接收。采用六组红外光敏耦合三极管发射和接受红外信号,外面可见光对接收信号的影响较小,再用射极输出器对信号进行隔离。接收的红外信号转换为电压信号经LM339进行比较,产生高电平或低电平返回给AT89S52。 LM339集成块采用C-14型封装,图4为其外型及管脚排列图。LM339类似于增益不可调的运算放大器。每个比较器有两个输入端和一个输出端。两个输入端一个称为同相输入端,用“+”表示,另一个称为反相输入端,用“-”表示。用作比较两个电压时,任意一个输入端加一个固定电压做参考电压(也称为门限电平,它可选择LM339输入共模范围的任何一点),另一端加一个待比较的信号电压。当“+”端电压高于“-”端时,输出管截止,相当于输出端开路。当 “-”端电压高于“+”端时,输出管饱和,相当于输出端接低电位。两个输入端电压差别大于10mV就能确保输出能从一种状态可靠地转换到另一种状态,把 LM339用在弱信号检测等场合是比较理想的。LM339的输出端相当于一只不接集电极电阻的晶体三极管,在使用时输出端到正电源一般须接一只上拉电阻。图1a给出了一个基本单限比较器。输入信号Uin,即待比较电压,它加到同相输入端,在反相输入端接一个参考电压(门限电平)Ur。当输入电压 Uin>Ur时,输出为高电平UOH。图1b为其传输特性。 本方案经济实惠,易于实现,可靠性好,因此采用方案三。黑带检测电路图如图6所示。 输出信号进入LM339。稳定性能得到提升。当小车低部的某边红外线收发对管遇到黑带时输入电平为低电平,反之为高电平。结合中断查询方式,通过程序控制小车往哪个方向行走。 图4 LM339外型及管脚排列图
2.2.3 检测铁片方案选择 方案一:采用电涡流原理自制的传感器,取材方便,但难以调试,输出信号也不可靠,成功率比较低,难以准确输出传感信息。 方案二:采用市面易购的电感式接近开关,本系统采用市面比较通用LJ18A3-8-Z/BX来完成铁片检测的任务。检测铁片电路原理图如图4所示。 LJ18A3-8-Z/BX接近开关靠近铁片时产生低电平,该信号经放大后传给单片机,单片机通过内部程序控制电机停转。虽然电感式接近开关占的体积大,但对本设计是可以接受,而且输出信号较可靠,稳定性好,受外界的干扰小。 方案三:采用市面比较通用LJ18A3-8-Z/BX来完成铁片检测的任务,其电路图如图5。接触开关直接接单片机,但接触开关LJ18A3-8-Z/BX 靠近铁片时,产生一个低电平返回给单片机,单片机通过程序控制小车停转60秒。此方案经检测简单可靠,而且本设计要求的精度不高,故采用方案三。
小车前轮转向采用舵机驱动,后轮采用电机驱动芯片L298驱动,其电路图如图6。 L298N可直接的对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,非常方便,亦能满足直流减速电机的大电流要求。调试时在依照上表,用程序输入对应的码值,能够实现对应的动作,调试通过。 其中舵机采用SERV0。它是一种位置伺服装置,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。 具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
L298
3.1 单片机最小系统组成 单片机系统是整个智能系统的核心部分,它对各路传感信号的采集、处理、分析及对各部分整体调整。主要是组成是:单片机AT89S52、小车驱动系统芯片L298N及各路的传感器件。 3.2黑带检测原理 利用光的反射原理,当光线照射在白纸上,反射量比较大,反之,照在黑色物体上,由于黑色对光的吸收,反射回去的量比较少,这样就可以判断黑带轨道的走向。由于各路传感器会对单片机产生一定的干扰,使信号发生错误。因此,采用一级射极输出方式对信号进行隔离,这样系统对信号的判断就比较准确。 4 系统程序设计为了提高小车反应灵敏度,对红外线接收信号及黑带检测信号都采用中断法来处理。用定时方法对铁片检测、计量路程、倒车、拐弯及数码管动态扫描进行处理。
图11 小车驱动程序 4.1 黑带检测程序 小车从起点出发后,一直保持前进状态病区再次状态下始终检测黑带,如果小车左侧某一路红外传感器监测到黑带,给单片机的P1口一个低电平,则小车向左侧拐弯,直到黑带到大小车的中部;如果小车右侧某一路红外传感器监测到黑带,给单片机的P1口一个低电平,则小车向右侧拐弯,直到黑带到达小车的中部。其流程图如图10所示。 5结论通过各种方案的讨论及尝试,再经过多次的整体软硬件结合调试,不断地对系统进行优化,智能小车能够完成各项功能到达车库。
请作者提供相关的图片,谢谢! |
 | |
|





| 评论 - 张贴你的评论 |
|
|
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

