

本项目介绍的是太阳能卫星机器人,同样是采用太阳能脉动充放电控制电路,但是却是另外一种全新的运动方式——以陀螺旋转的方式移动,所以又称为太阳能陀螺机器人。
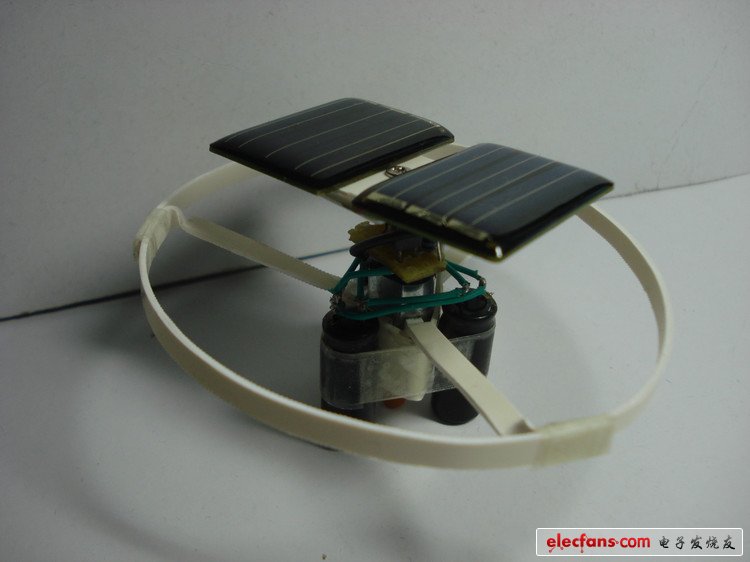
如果了解BEAM机器人的朋友,可能对这样造型的机器人已经很熟悉了——三脚支架中的两脚,加上连接电机的底部转盘,总共三点支撑地面,晒会太阳充会电,电机驱动转盘转动再带动机器人移动。
一、基本原理
1.1、驱动原理
1.2、机械结构
1.3、电路原理
二、准备工作
三、制作过程
3.1、电路焊接
3.2、三脚支架
3.3、电 路 板
3.4、电机支架
3.5、整机组装
3.6、整机调试
四、效果展示
五、扩展完善
5.1、功能扩展
5.2、版本升级
六、常见问题
七、项目总结
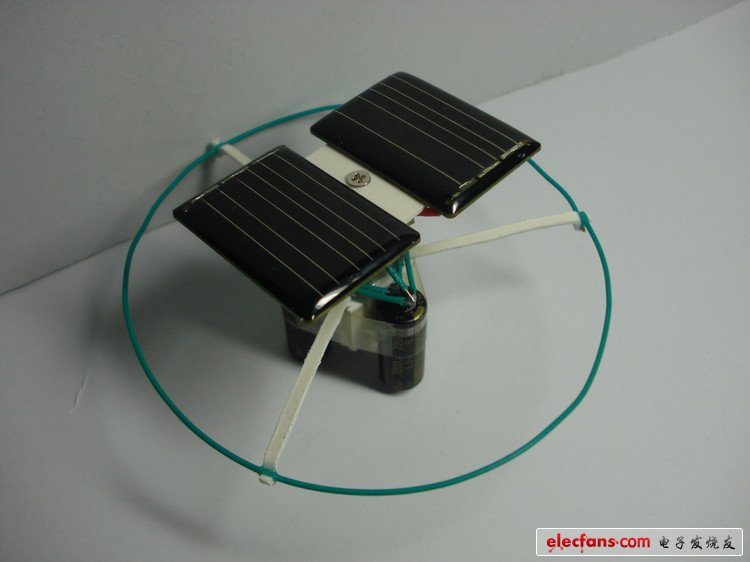
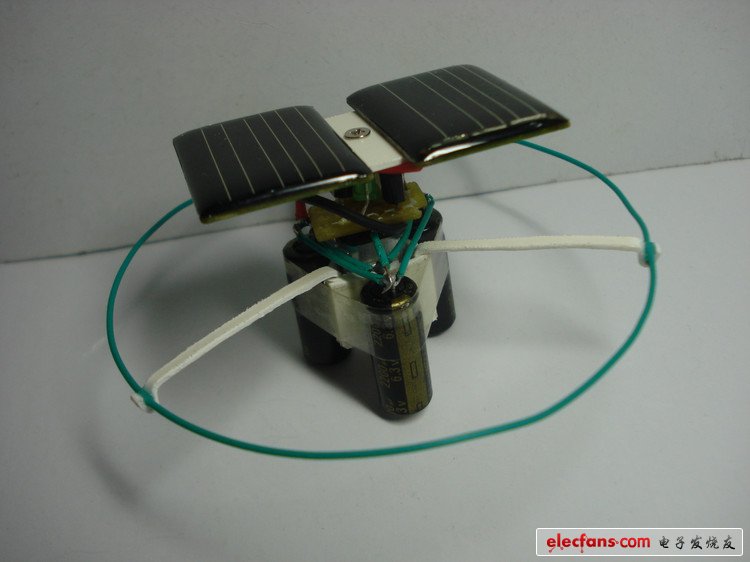
从以上插图我们可以看到两种不同的造型,不过原理都是基本一样的,只不过结构上有一点区别(有一个带了碰撞环,这个后面会具体说明)。
一、基本原理
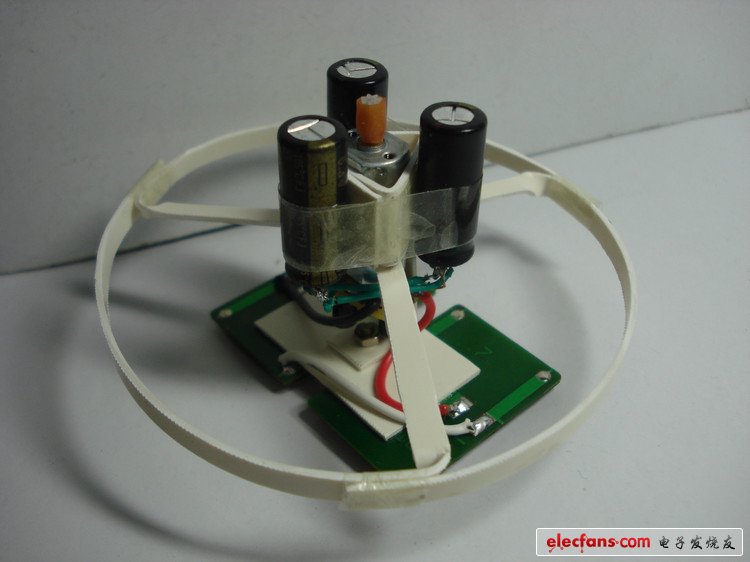
本项目的机器人的外形像一个人造卫星,是以太阳能电池作为电源,电机驱动底部的转盘转动,从而带动整个机器人移动。由于以自身转动的方式进行移动的,就像一个旋转的陀螺,所以本项目机器人又可称为“陀螺机器人”。
1、驱动原理
本项目的驱动原理也是比较简单的,主要是电机带动底部的转盘转动——机器人有一个三脚支架,同时只有相邻的某两脚支撑地面,再加上底部连接电机的转盘,“两脚+转盘”——三点支撑地面。电机带动转盘转动,则其中一点转动,另外两点支撑,机器人就可以整体移动。
2、机械结构
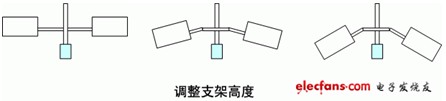
本项目机器人有一个三脚支脚,主要有三种情况的结构,稍微通过调整就可以有不同的运行效果。
1、如果是三脚支架离地比较高(相对于转盘),且底部用直径比较小的转盘,则三点平衡比较稳定,每完成一次充电周期后电机转动只能带动转盘转一点距离,一般只能是由一组相邻的双脚交换为下一组相邻的双脚支撑地面,每周期移动的距离比较小。
2、如果是三脚支架离地过高(相对于转盘),则三点平衡相当稳定,虽然能够带动机器人移动,但是因为支架过高导致无法交换支撑地面的双脚,就是说一直都是开始运动时默认支撑地面的双脚着地。
3、如果是三脚支架离地比较低(相对于转盘),以及底部用直径比较大的转盘,则三点平衡相对不够稳定,每个充电周期后的运行可以接近平滑移动,也就是说每周期移动的距离相对会大一点。
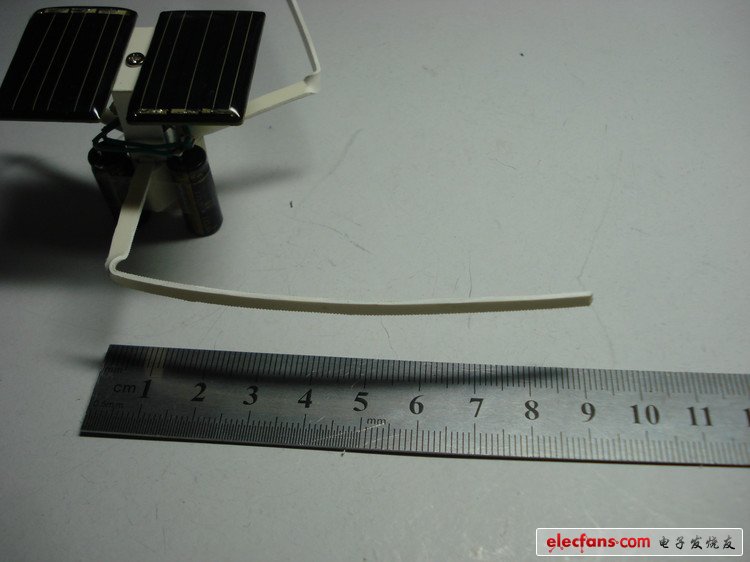
作为扩展的结构功能,本项目的机器人还可以增加一个“碰撞环”:用PVC剪成细条做一个环,再用三根细条支架固定在周围一圈。本机器人加了“碰撞环”后,如果在转动移动的过程中,碰到障碍物后会有一个反弹转向的效果,之后再继续转动移动(具体见:版本升级)。
3、电路原理
本项目机器人的控制电路和PVC-2号机器人项目基本是一样的——典型的脉动充放电电路。
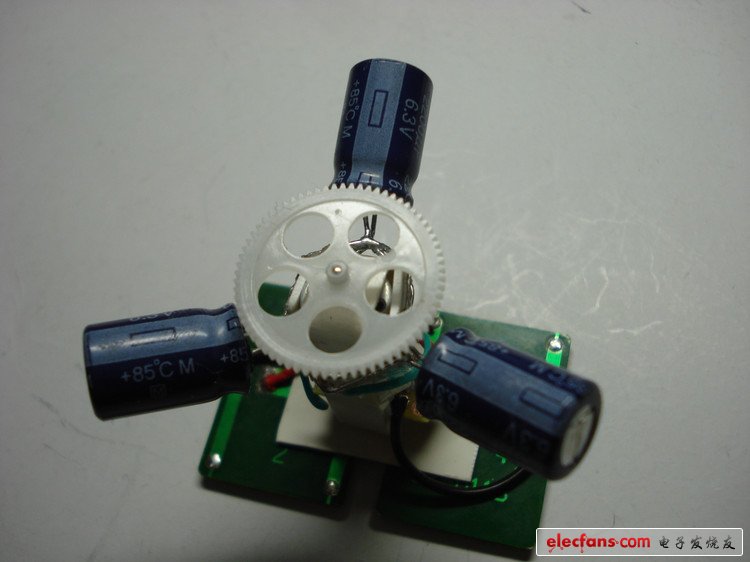
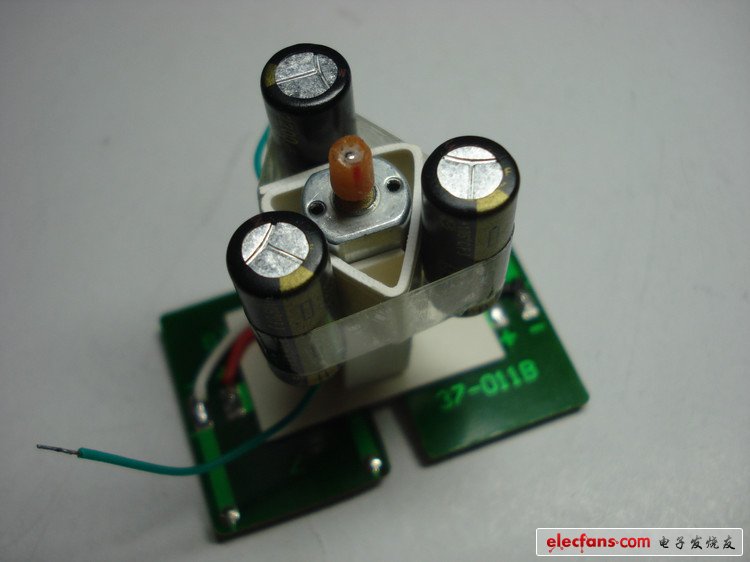
但是两者还是有一点区别:PVC-2号项目的电解电容是一个4700uF,而本项目的电路采用的是三个2200uF的电解电容。
三个电解电容并联在一起,其容值就是三个电解电容之和,这样本项目采用的电解电容其实就是6600uF,比PVC-2号的4700uF大一点。对于本脉动充放电电路来说,电解电容的容量越大,储电量就会越大,但充电的时间也会越长,不过放电的时间也会越长,持续运动的时间也会越久。
当然,本项目之所以用三个电解电容并联在一起代替原来的一个电解电容,主要还是因为机械结构的需要,即用三脚支架作为平衡支撑的结构。
基本原理如下:
1)太阳能电池板给电解电容充电,电解电容两端的电压不断上升;
2)当电路电压达到LED二极管的导通电压(2V左右)时,LED二极管导通;
3)三极管9015的基极从导通的LED二极管获得足够的导通电压,则三极管9015导通;
4)三极管9015导通后,又使三极管9014的基极获得足够的导通电压,则三极管9014导通;
5)三极管9014导通后,电机获得电流开始转动;
6)电机转动,消耗电解电容中存储的电能,电路电压下降;
7)当电路电压下降到低于LED二极管的导通电压时,LED二极管截止;
8)虽然三极管9015的基极失去了来自LED的导通电压,但是由于此时三极管9014已经导通,导通后的电流除了提供给电机转动之外,还通过电阻分流了一部分重新回到三极管9015的基极(形成一个循环),即三极管的基极还是有足够的导通电压;
9)当电机继续转动消耗电解电容的电能时,电路电压进一步下降,则即便三极管9014导通后回流给三极管9015基极的电压也无法保证三极管9015继续导通(循环被破坏),则两个三极管都截止,电机停止转动;
10)电解电容重新充电,继续重复上面的各环节。
简单的说,即:太阳能电池对电解电容充电,当充电量达到由LED二极管设置的充电上限后,则电路开始瞬间放电提供给电机转动;虽然电机转动消耗电能使电压下降至低于LED二极管的下限,但是由于电路存在一个导通循环的机制,仍然会继续放电让电机转动,能够尽可能的把电解电容中存储的电能都消耗掉;消耗完电解电容中的电能后,重新由太阳能电池对其进行充电……如此循环往复。
也可以这样理解:太阳能电池对电解电容进行缓慢充电(太阳能电池的电流比较小),充电达到上限后对电机进行瞬间放电(电机的电流比较大);放电停止的下限比较低,可以比较彻底的把充电的电量消耗完。
在PVC-Robot 2号机器人的项目中已经对该电路原理进行了更详细的分析,这里不再重复。如果还有不清楚的,或者有兴趣继续了解的,可以点击这里:PVC-Robot 2号 电路原理分析。
二、准备工作
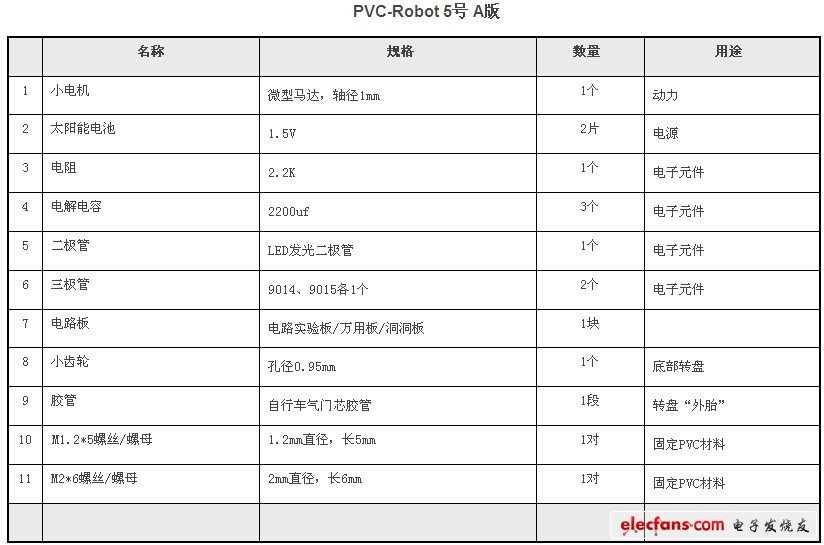
本项目需要的器材主要包括:PVC线槽、小型电机(马达)、太阳能电池、电阻、电解电容、二极管、三极管、螺丝/螺帽等。

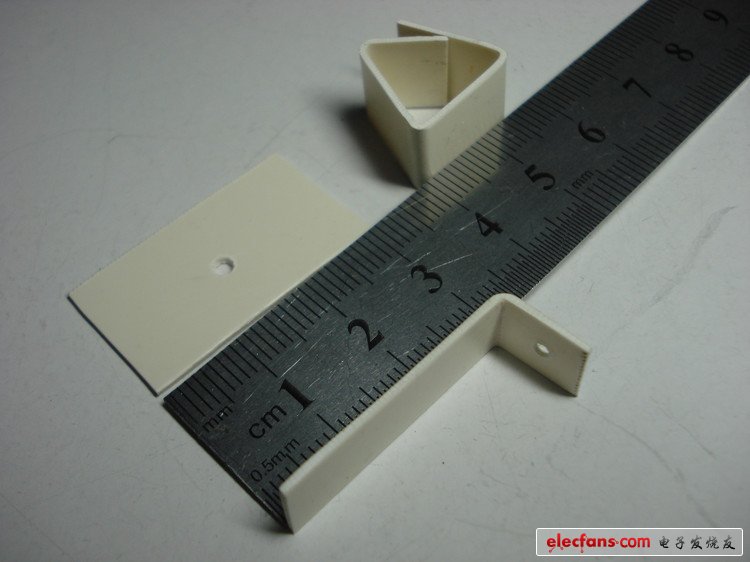
本项目采用的PVC线槽没有具体的规格要求。
以下列出本项目的主要器件:
三、制作过程
以下将按照制作的顺序,全程介绍本项目机器人的制作过程。
3.1、电路焊接
本项目机器人的控制电路和PVC-Robot 2号机器人项目是一样的,虽然一个是单个的大电解电容,一个是三只并联在一起的小电解电容,但是电路板还是一样的(电解电容可以外接)。
这是“电路板正面布局图”(无焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):

这是“电路板底面布局图”(有焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
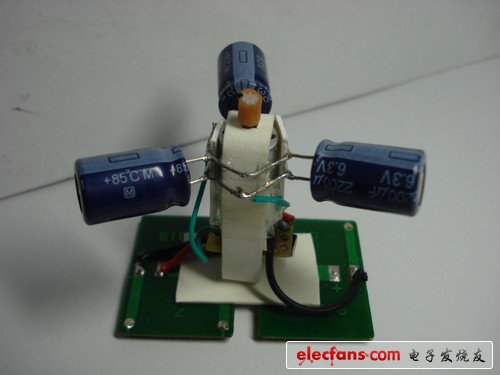
选读内容——搭焊:
作为尝试或者说作为进阶,也可以省去电路板,直接对电子元件的引脚进行搭焊。
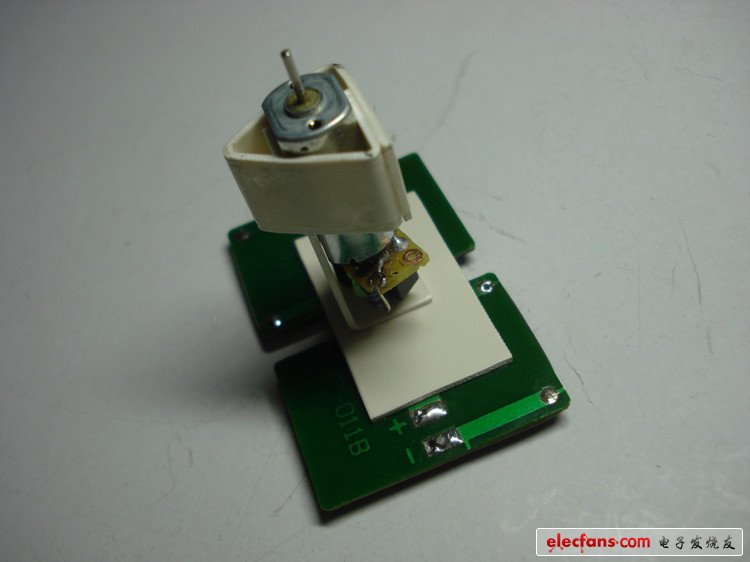
因为要围绕电机直接搭焊,为了防止电机的金属外壳把电路给短路了,可以在外壳上包一圈透明胶布。
直接把电子元件直接焊在电机的电极上。
焊接好的电路。

搭焊电路的效果比较有粗放的艺术质感,而且不同的人可能焊接布局的方式不同,最终的效果也都不一样,作为DIY来说会比较有个性。但直接搭焊对于焊接的技巧要求比较高,尤其是稍微复杂一点的电路不好把握好。正因为如此,在我们PVC教程中只是把搭焊作为一个附属的“选修”内容。
电路调试
特别注意,本项目的太阳能机器人一般只能在太阳下才能运行,而在普通灯光下由于亮度不足将无法正常运行。如果要在室内测试太阳能机器人,由于光线不足就需要借助特别的灯光——可以选择100瓦的白炽灯(在实体五金店中可以很容易买到灯泡和插座),以代替阳光。(注意:不能用一般日光灯或是节能灯,因为其亮度无法让太阳能电池有足够的输出功率)。

在白炽灯下,进行电路测试。
正常效果,马达会每隔几秒钟转动几下。调整白炽灯与太阳能电池板的距离,查看马达在光线不同时的效果——光线越亮,马达每两次转动的间隔就会越短,如果灯泡贴着太阳能电池板甚至马达会持续转动。
3.2、三脚支架
用三只电解电容做成三脚支架。
先把三只电解电容按下图布局排好。

把电解电容的引脚折成如下图形状,把三只电解电容的电极分成两层连在一起,注意正极的与正极连一起,负极与负极的连在一起。

把三只电解电容的电极并联焊在一起。


























 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

