
指导教师:王树斌 董斌
作品简介
图1水陆两栖多功能视频救援车
在现实生活中,很多场所是人很难进入的。例如发生火灾的楼房,人员很难进入了解灾情,在这种状况下很难采取及时有效的灾情解决方案,这样会错过最佳的救援时机,可能会造成更加严重的后果。
本方案制作了一个可以电脑、平板或智能手机实现wifi视频遥控的救援车。救援车具有越障功能、爬楼梯功能、水上运动功能、电脑视频遥控功能、平板视频遥控功能、手机视频遥控功能。另外,救援车上安装了机械臂,可以实现拾取物品、拧动开关等功能,救援车具有很强的环境适应能力,可以在复杂的地形中行走,可以实现复杂地形的灾情勘测、环境勘测等。本方案制作以信号收发装置和STC15F2K61S2单片机为核心,由电机驱动、单片机最小系统、信号转换模块、电平转换模块、视频传输模块、变速控制模块等部分组成。驱动模块以L298N驱动芯片为核心组成,使救援车电机正常工作;单片机作为主控芯片,控制摄像头舵机、舵机臂舵机、机械臂舵机、抓手舵机的旋转及各个电机的转动。信号转换模块实现信号收发装置与单片机之间的通信,电平转换模块满足单片机和信号收发装置的电压需求。
救援车在使用时,首先需要打开信号收发装置的电源,使信号收发装置发射出无线wifi信号,然后通过电脑、平板电脑或者手机对无线wifi信号进行搜索并进行连接,连接过程中需要出入密码,无线wifi信号的密码可以进行设置,使信号只允许固定用户使用。其次,打开上位机进入控制界面,此时就会看到摄像头拍摄的视频传回到控制终端。最后,通过上位机的按钮进行救援车的控制。但在实现救援车的水上运动功能时,需要将车放在自制的底盘上,使救援车浮在水面上,并将桨叶安装到轮子上,为救援车提供动力。这样,救援车就可以在水面上实现各种功能。
平台选型说明
选用大赛指定的单片机开发板(以STC15F2K61S2芯片为控制核心)。
设计说明
水路两栖多功能视频救援车上装载信号收发装置,信号收发装置可以发射无线信号。电脑、平板或手机通过连接无线网络进而进入设定的界面,通过以MAX232主控芯片的信号转换模块实现STC15F2K61S2单片机和信号收发装置之间的通信,进而对救援车进行控制;通过控制驱动模块控制减速电机进而控制救援车的前进和转向。通过控制舵机控制救援车上摄像头的转动来实现车前方视野的转换,从而可以看见救援车前方多个方位的环境。救援车上的机械臂可以实现物品的拾取、开关的拧动等功能。救援车的前方和后方各有一个舵机及舵机臂,舵机臂上有轮子,从而可以通过控制舵机的转动使小车实现爬楼梯及越障的功能。救援车通过控制继电器,从而改变驱动模块的供电电压进而实现车的变速。救援车的水上运动功能的实现首先需要安装底盘,使救援车浮在水面上,其次,在后轮上安装桨叶为救援车的运动提供动力。
1、系统控制框图:
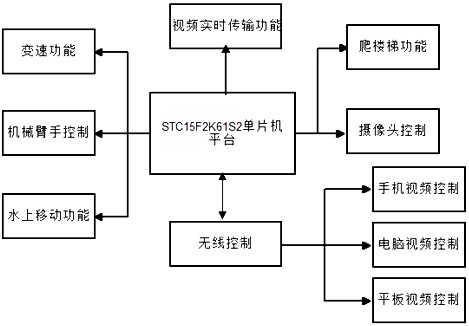
图2 原理框图
2、微控制器:采用STC15F2K61S2单片机作为主控制芯片。STC15F2K61S2单片机是一种低功耗、高性能的CMOS8位微控制器,片内大容量2048字节SRAM,内部集成高可复位电路并可彻底省掉外部昂贵的复位电路,具有8K在系统可编程FLASH存储器,32个可设置四种模式的外部双向I/O口,运行速度快,价格便宜,性价比高。
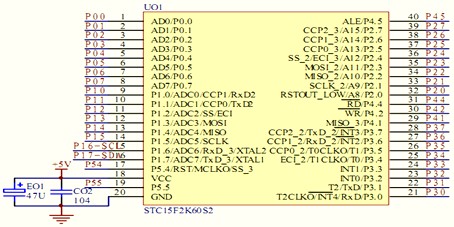
图3 STC15F2K61S2单片机
2、驱动电路设计:智能小车电机驱动采用L298N电机驱动芯片模块,由单片机控制其工作,从而控制小车的运动状态。此芯片工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H桥的高电压大电流全桥式驱动器可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制,控制直流电机简单容易。该驱动模块使用光耦将电机电压与信号电压分隔,增强了可靠性。
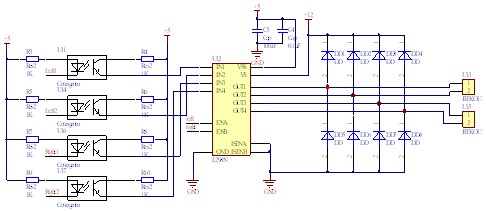
图4 电机驱动模块原理图
3、信号转换模块电路:救援车信号转换模块由MAX232为主控芯片组成,将RS232信号转换为TTL信号,实现单片机与路由器之间的通信。其工作稳定,转换精度高。具有较高的工作效率且功率低价格便宜。
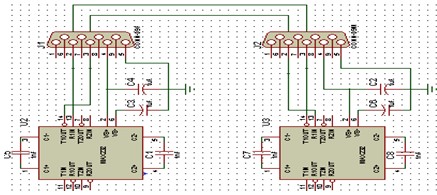
图5 RS232与TTL信号转换
4、电源电路:水陆两栖多功能视频救援车通过可充电环保锂电池供电,电池电源DC-DC稳压模块进行电压转换,此稳压模块相对于其他模块来说,更大限度地避免了电能在降压模块上面的消耗,并且内部震荡部分控制其占空比就能改变输出电压大小(在10V范围内),使其输出能恒定,若某个DC-DC规定输入范围是6V到16V,输出5V,只要是在这个输出范围内,输出都是5V(误差只有零点零几伏)。小体积、高可靠性、输出稳压精度可达±3%,高性价比,多种输入输出电压内置输入滤波器,低电磁兼容特性,此模块可以稳定电池的供电电压,使救援车行进状态更加稳定。
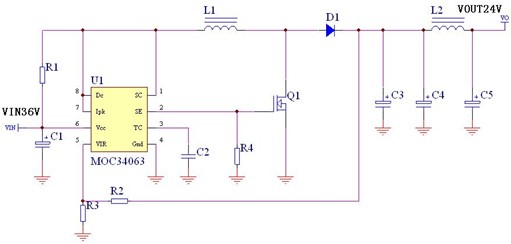
图6 L7805稳压电路
作品特色
1、多平台控制,操作简单方便。救援车可以实现电脑视频遥控、手机视频遥控及平板电脑视频遥控,可以直接通过电脑或平板屏幕可以看见小车前方的环境,进而控制小车的各种运动状态。此功能可以实现对未知环境状况且人员不方便进入的环境进行环境勘测,保障了救援人员的人身安全,操作简单、更加方便。
2、水陆两栖,应用范围广,适应能力强。救援车在陆地具有攀爬楼梯及越障的功能,同时具有水上运动功能。小车可以通过前臂和后臂的支撑实现简单的越障和爬楼梯的功能,此项功能可以使小车实现楼房内部灾情监测的功能。救援车的履带式轮使小车可以在比较复杂的地形进行行走,增强了救援车的环境适应能力。救援车可以在水上实现在陆地上可以实现的功能,从而实现水上环境的勘测及水面物品的拾取。
3、功能丰富。救援车上安装了机械平台,可以在平台上安装机械臂、电动工具等,可以实现拾取物品、拧动开关等动作。救援车还具有变速功能,通过档位选择可以实现小车的高速和低速行驶。这样使小车的行走更具有灵活性、选择性。
4、随着3G网络的发展,救援车的控制可以同时兼容3G网络控制。在资金条件的允许下,救援车的各项功能可以做到更加智能、更加完善。
系统演示视频:http://v.eepw.com.cn/video/play/id/2273
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

