
指导教师:刘涛
产品简介
开发背景:声控拨号,声控家电,声控打字,声控设备越来越多的出现在人们的日常生活当中,可以毫不夸张的说。未来是声控的世界。
该语音声控小车采用STC15F2K61S2芯片为控制核心的单片机开发板作为控制板,单片机的拓展能力很强,因此我们将寻迹模块,避障模块,远程控制模块,语音识别模块等功能集合在该小车中。
主要功能:
1、通过单片机控制小车前进,后退,左转,右转功能。
2、声控利用系统的语音播放和语音识别资源,实现语音控制的功能。
3、加入寻迹模块,避障模块,自动完成寻迹,避障工作。
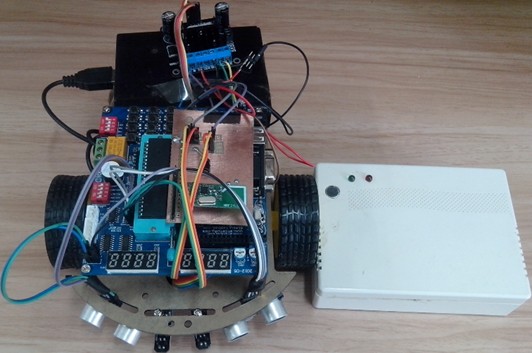
产品结构:本系统主要由STC15F2K61S2单片机控制器模块、电源模块、寻迹传感器模块、直流电机及其驱动模块、避障模块、语音模块、无线收发模块等模块构成。
使用说明:
1、操纵员分别发出命令:前进、后退、左转、右转。以操控小车进行相应动作。
2、通过操纵员语音:“启动寻迹”,小车能在指定的线条里寻迹。
3、通过操纵员语音:“启动避障”,小车能在黑线框内自由行走,遇黑线自动后退,遇障碍物自动避障,寻可行路线继续前行。
平台选型说明
STC15F2K61S2单片机开发板
设计说明
1.1、设计要求
1.1.1、设计任务一
设计制作一个语音控制小车模型,操纵员分别发出走前进、后退、左转、右转、停止、原地左转圈、原地右转圈等命令,通过无线传输命令信息,控制远方的小车进行相应的动作。
1.1.2、设计任务二
设计制作一个寻迹控制小车,按照设计好的路线寻迹。
1.1.3、设计任务三
设计制作一个避障控制小车,在小车能在黑线框内自由行走,遇黑线自动后退,遇障碍物自动避障,寻可行路线继续前行。
1.2、系统设计模块构成
本系统主要由单片机控制器模块、电源模块、寻迹传感器模块、直流电机及其驱动模块、避障模块、语音模块、无线收发模块模块构成。
1.3、硬件设计
1.3.1、车体设计
自己制作小车。经过反复考虑论证,我们制定了两个车轮分别驱动。
1.3.2、电源模块
通过外接12V电源(也可以用电池)给直流电机供电、通过7805稳压5V给出单片机供电,语音控制端通过USB连接电脑5V供电。
1.3.3、语音识别模块
语音识别模块采用了LD3320芯片控制的语音识别模块,它是一款“语音识别”专用芯片,由ICRoute 公司设计生产。该芯片集成了语音识别处理器和一些外部电路,包括AD、DA 转换器、麦克风接口、声音输出接口等。本芯片在设计上注重节能与高效,不需要外接任何的辅助芯片如Flash、RAM 等,直接集成在现有的产品中即可以实现语音识别/声控/人机对话功能。并且,识别的关键词语列表是可以任意动态编辑的。
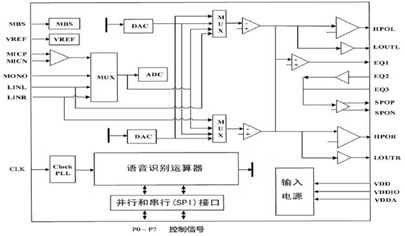
设计中采用MCU控制模式,通信协议采用标准DSA 的模式做为基础修改,占用系统资源少,对时间没有严格要求。MCU 控制模式通过DSA_DATA、DSA_ACK、DSA_STB 三个端口来控制 LD3320 工作,LD3320与MCU的DSA连接如图4所示,通过软件的处理,可以轻松的对FLASH内的语音文件进行解码并播报

图4
1.3.4、寻迹传感器模块
用红外发射管和接收管自己制作光电对管寻迹传感器。红外发射管发出红外线,当发出的红外线照射到白色的平面后反射,若红外接收管能接收到反射回的光线则检测出白线继而输出低电平,若接收不到发射管发出的光线则检测出黑线继而输出高电平。这样自己制作组装的寻迹传感器基本能够满足要求。
1.3.5、避障模块

用超声波传感器进行避障。超声波传感器的原理是:超声波由压电陶瓷超声波传感器发出后,遇到障碍物便反射回来,再被超声波传感器接收。然后将这信号放大后送入单片机。超声波传感器在避障的设计中被广泛应用。由于在设计小车车体时的特殊性,我们在车体上装了3个超声波传感器模块,以适应车体各个方向检查障碍物的需要。
1.3.6、电机模块
本系统为语音控制小车,对于电动小车来说,其驱动轮的驱动电机的选择就显得十分重要。由于本设计要实现对路径的准确选择和执行,我们综合考虑了一下两种方案。
方案1:采用步进电机作为该系统的驱动电机。由于其转过的角度可以精确的定位,可以实现小车前进路程和位置的精确定位。虽然采用步进电机有诸多优点,步进电机的输出力矩较低,随转速的升高而下降,且在较高转速时会急剧下降,其转速较低,不适用于小车等有一定速度要求的系统。经综合比较考虑,我们放弃了此方案。
方案2:采用直流减速电机。直流减速电机转动力矩大,体积小,重量轻,装配简单,使用方便。由于其内部由高速电动机提供原始动力,带动变速(减速)齿轮组,可以产生大扭力。
我们所选用的直流电机减速比为1:74,减速后电机的转速为100r/min。我们的车轮直径为6cm,因此我们的小车的最大速度可以达到
V=2πr·v=2*3.14*0.03*100/60=0.314m/s
能够较好的满足系统的要求,因此我们选择了此方案。
1.3.7、电机模块驱动
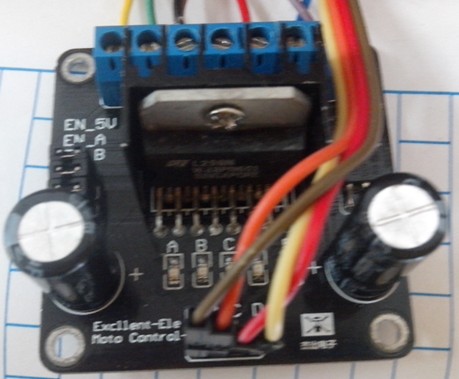
我们采用了专用芯片L298N作为电机驱动芯片。L298N是一个具有高电压大电流的全桥驱动芯片,它相应频率高,一片L298N可以分别控制两个直流电机,而且还带有控制使能端。用该芯片作为电机驱动,操作方便,稳定性好,性能优良。
系统测试
1、测试仪器设备清单

2、功能测试
2.1、1、操作员分别发布前进、后退、左转、右转、停止、原地左转圈、原地右转圈等命令,小车行驶按照规定,准确无误。
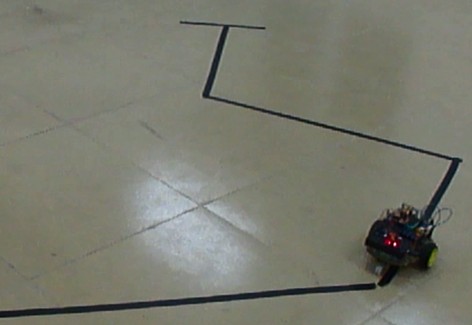
2、通过操纵员语音:“启动寻迹”,小车能在指定的线条里寻迹。线路如图:
3、通过操纵员语音:“启动避障”,小车能在黑线框内自由行走,遇黑线自动后退,遇障碍物自动避障,寻可行路线继续前行。线路如图:
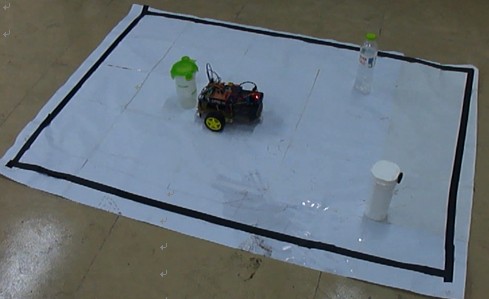
小车路线示意图
3、结论
经过个方面的测试,小车完整的完成了给小车设定的任务,接收命令反应正常、语音播报正常、行驶路线正常。
作品特色
本产品采用高速8051微控制器内核的STC15F2K61S2开发板作为语音的播报和识别,这是一块精简的开发板,该系统板体积小、功能齐全、资源丰富,处理速度高,尤其适用于语音处理和识别等领域。
语音控制方面:采用了LD3320语音芯片系统,该芯片由ICRoute 公司设计生产。该芯片集成了语音识别处理器和一些外部电路,包括AD、DA 转换器、麦克风接口、声音输接口等。本芯片在设计上注重节能与高效,不需要外接任何的辅助芯片如Flash、RAM 等,直接集成在现有的产品中即可以实现语音识别/声控/人机对话功能。并且,识别的关键词语列表是可以任意动态编辑的。
远程控制方面:该小车使用了2.4-2.5GHz的ISM频段的单片射频收发,有利于对智能小车进行远程控制。
车体设计:小车设计成利用三个舵机分别对三个车轮进行方向控制,这样,当小车转弯时,整个车体不用转动,只需通过舵机对三个车轮方向进行调整,以让小车能轻松实现操纵员对它的控制,并且有助于小车适应复杂的地形环境。
开发前景方面:该语音智能小车,生产成本低,易于改装,可以在该小车的基本模型及功能下增加或者减少需要的如:寻迹、蔽障、遥控、机器臂、摄像监控等多种功能,适合多种场合以及开发的要求。
系统演示视频:http://v.eepw.com.cn/video/play/id/2278
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

