
作者:大连理工大学 阮新宇 陈家鹏 罗汀
指导教师:孙鹏 吴振宇
作品简介
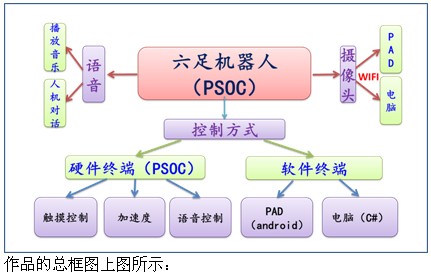
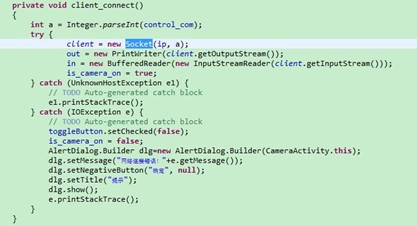
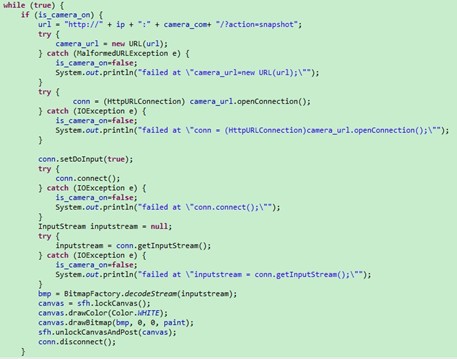
该作品主要是采用了Cypress公司的CY8C3866AXI-040芯片为控制核心,制作了一系列的对六足机器人的控制方式。其中机器人主体应用了该芯片多达19路的PWM输出对伺服电机进行合理控制并完成相应动作,机器人控制终端部分我们采用了该芯片的电容触摸感应模块(CapSense)、ADC采集模块、SPI模块、UART模块功能制作了手持的多功能无线遥控装置。另外我们还采用了无线路由传输数据的方式,通过采集安置于机器人上的摄像头图像的方式对该机器人进行远程控制,分别可以采用PC上位机和android上位机进行控制。
六足机器人以CY8C3866AXI-040芯片为控制核心采用了19个小型的舵机作为机器人运动装置。电路控制方案上我们采用了,共用了19路PWM输出控制19个舵机的运动。还应用了该芯片的UART功能跟蓝牙模块通讯,跟路由通讯。
合理的电源设计方案对该作品至关重要,所以我们采用了两个电源分别对控制板和舵机供电方案,远远降低了因为电源电压下降导致的系统版出现错误工作的风险。

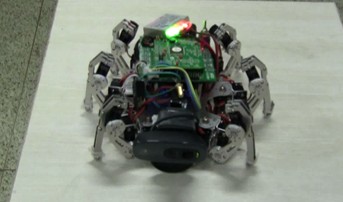
上图为硬件终端的实物图。
当处于触摸控制模式时,左侧为带基本功能控制的四个工作触摸按键和一个模式切换键,右侧的触摸滑调主要是用来控制六足机器人行动的速度,两列的LED为速度指示灯。
当处于加速度控制模式时,向前倾斜为前进,向前倾斜并向左倾斜便是左转,向左90°竖立是左移,其他动作依次类推。同时LED会根据当前加速度采集量进行亮灭控制,用来表示当前速度。
当处于语音控制模式时,我们除了可以控制六足机器人的动作之外,同时可以控制MP3模块进行音乐播放的控制。我们设置的指令有:“小宁前进”、“下一曲”等等。
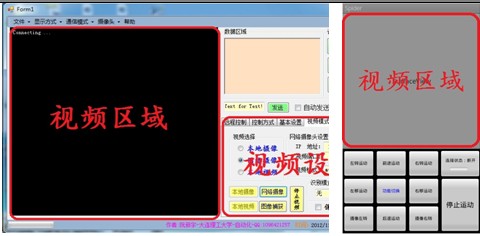
右图和左图分别是PC上位机和安卓上位机。上位机可以通过搭载在六足机器人上的摄像头了解机器人所处的位置和状态。通过无线路由进行数据通信,并对机器人完成相应的控制和MP3音乐的播放。
平台选型说明
PSOC开发板(以CY8C3866AXI-040芯片为控制核心)
设计说明
一、基于PSOC的多功能遥控装置
本装置采用了PSOC的SPI、UART、ADC以及CapSense等模块。本装置采用三种不同的控制方式,分别为电容触摸按键控制,加速度控制,语音控制。
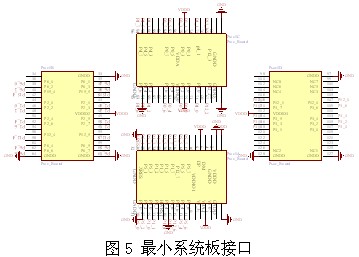
1.1.最小系统板
最小系统板采用的是CY8CKIT-001 PSoC Development Kit开发板所带的最小系统板,如图
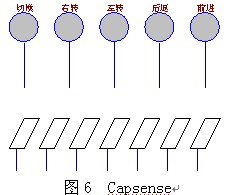
1.2.电容触摸按键控制(应用CapSense)
电容按键设计仿照PSOC开发板设计。我们设计电容按键五个和一个7个单位的滑调。程序代码采用PSOC creator 自带的CapSense库进行硬件初始化,并在程序编程中利用按键实现控制六足机器人的前进、后退、左转、右转的基本操作和控制模式的切换。滑调检测用于控制六足机器人的行动速度,电路图如图6所示:
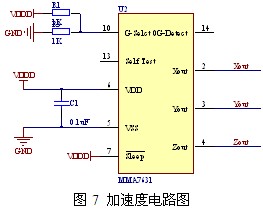
1.3.加速度控制(应用 ADC)
我们此次设计采用的是Freescale的三轴模拟加速度传感器MMA7631L,电路原理图如左图。三轴的模拟量输出直接与微控制器的IO管脚相连接。利用微控制器自带的ADC模块,进行了滤波、采集,保持转换为数字量等诸多步骤。由于采集的加速度为三路,故ADC采集的时候加入了多路选择开关MUX,满足了单个ADC模块对多路模拟量的数字化,电路图如图7所示:
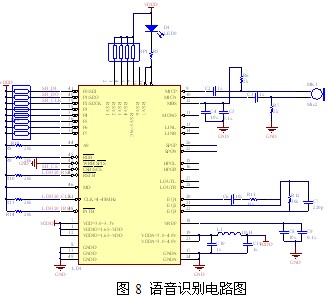
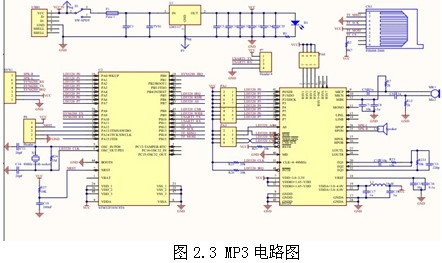
1.4.语音控制(应用SPI)
左图为本装置语音控制的硬件连接原理图。主要采用了语音芯片LD3320设计。其与微控制器通讯协议采用的是SPI协议,我们在软件编程上采用了SPI模块保证了数据量的实时性与数据的传输效率,电路图如图8所示:
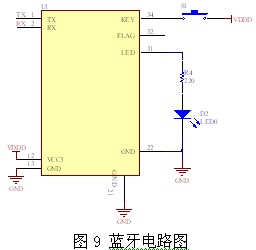
1.5.蓝牙传输(应用UART)
右图为蓝牙通信模块的电路原理图。改模块为整个装置进行无线控制的基础,微控制器使用了UART模块与该模块进行数据交互,通过该模块发送特定的指令给六足机器人,六足机器人接到相应的指令之后进行相应的动作,电路图如图9所示:
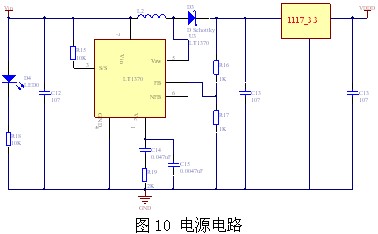
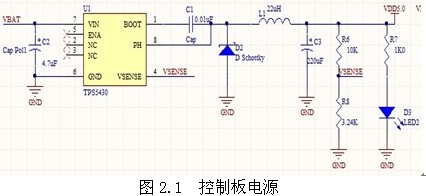
1.6.电源设计
电源设计方案原理图如上,由于采用的是3.7V的电池对遥控装置进行供电,而板子上的芯片的工作电压为3.3V,而没有比较合适的低压差的线性稳压芯片进行稳压。所以我们采取了先升后降的方案对板子进行电源管理。上图中采用的是凌力尔特的LT1370芯片先对3.7V进行升压至5V,然后通过线性稳压器1117将电压稳压到3.3V。这样可以充分的保证了各个用电设备不会因为电压不足而产生未知的问题,电路图如图10所示:
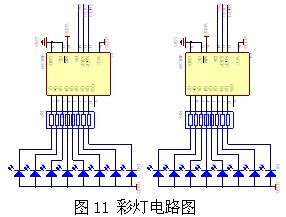
1.7.附加彩灯
彩灯的电路原理图如左图。采用了两片串转并的芯片74HC595进行控制,595的使用使布线上减少了不少的麻烦。彩灯主要在三种控制模式下都是表示当前六足机器人的运行速度,电路图如图11所示:




 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

