
作者:安徽理工大学计算机科学与工程学院 陈金龙 甘磊 刘辉
指导教师:廖正和
作品简介
1、开发背景
随着我国社会经济的飞速发展,在日常工作和生活中,由于电动自行车价格低廉,使用方便,现已成为大众化的交通工具,缓解了各个城市巨大的公共交通压力。电动车在带给人们方便的同时,也出现了许多交通事故,因此造成了的人员伤亡及经济财产损失,因此电动车驾驶的安全性已逐渐成为人们关注的焦点,国家即将对电瓶车实行牌照管制。
对公路交通事故案例的分析表明,80%以上的车祸是由于驾驶员反应不及时引起,超过65%的车辆相撞属于追尾相撞,其余则属于侧面相撞。对于电动车来说,大多是电动车驾驶者安全意识的不强,尤其在转弯的时候,忽视了与前车的安全距离,致使刹车距离过短,导致各种交通事故。
为了减少电动车事故的发生,给拥有电动车的用户提供安全感,本设计研制一种简单可靠、使用方便且价格低廉的智能安全辅助系统,具有很高的应用价值。
2、结构说明
根据产品性价比和实际需要,选用STC所研制的单片机开发板STC15F2K60S2,添加超声波测距模块和电动车电机控制模块,车速检测模块,实时显示行车过程中的车速,与前车或障碍物的距离,并根据车速计算安全距离,通过测距模块检测到的距离和安全距离比较,从而实现碰撞检测预警系统。系统由超声波测距模块、电机控制模块,车速检测模块、STC单片机,辅助电路(复位电路和晶振电路)及声光报警电路等组成。
3、功能与使用说明
本系统主要应用在电动车上,将本系统装置安装在电动车上,就可以通过数码管动态跟踪显示当前车速;并通过LCD显示器显示与行车前方的车辆(或者障碍物)的距离。用户可以对距离上限、中限、下限值等参数设定;也可以对距离、时间、定时等报警允许参数设置;最大量程及最小分辨率均由用户设置;支持增值测距功能。行车时如果与前车间距低于当前车速规定的安全距离时,声音报警提醒驾驶者减速防止追尾前车,并亮起尾灯提醒后面的车辆防止追尾。预留升级空间,未来的市场化产品可以添加语音模块以实现语音提示预警。
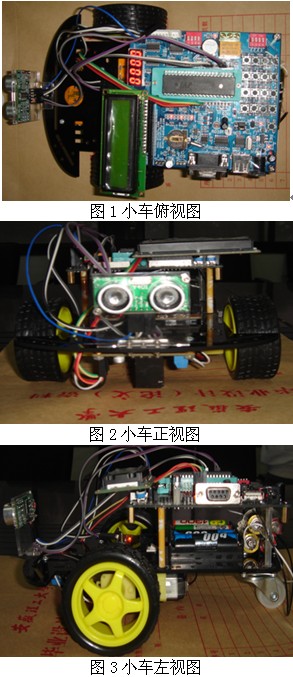
小车全景图片如下所示:
平台选型说明
本设计采用STC15F2K60S2系列单片机作为主控制器开发板如图4所示,兼容传统8051 ,再增加超声波测距模块和电机控制模块。

STC15F2K60S2系列主要性能:
大容量2048字节片内RAM数据存储器
高速:1个时钟/机器周期,增强型8051内核,速度比传统8051快7~12倍,速度也比STC早期的1T系列单片机(如STC12/11/10系列)的速度快20%。
宽电压:5.5~3.8V,2.4~3.6V(STC15L2K60S2系列)低功耗设计:低速模式,空闲模式,掉电模式(可由外部中断或内部掉电唤醒定时器唤醒),内部高精度R/C时钟,±1% 温飘(-40℃~+85℃),常温下温飘5‰,可彻底省掉外部昂贵的晶体时钟,内部时钟从5MHz~35MHz可选。
内部高可靠复位,ISP编程时8级复位门槛电压可选,彻底省掉外部复位电路。支持掉电唤醒的资源有:INT0/INT1(上升沿/下降沿中断均可), INT2/INT3/INT4(下降沿中断); CCP0/CCP1/CCP2/RxD/RxD2/T0/T1/T2管脚;内部掉电唤醒专用定时器。工作频率:5~35MHz,相当于普通8051:60~420MHz。
8/16/24/32/40/48/56/60/61K字节片内Flash程序存储器,擦写次数10万次以上。大容量片内EEPROM功能,擦写次数10万次以上。
ISP/IAP,在系统可编程/在应用可编程,无需编程器/仿真器。
高速ADC,8通道10位,速度可达30万次/秒。3路PWM还可当3路D/A使用。
开发使用软件环境:本设计采用keil uVision4开发环境,stc-isp-15xx-v6.21 烧录程序以及Protel 99 se制板软件,上位机选择安装Windows7 64位操作系统的PC机。
设计说明
1、设计原理
本设计中选用大赛官方提供的STC单片机开发板作为控制模块,添加的外围模块有:超声波测距模块,LCD和数码管显示模块,电机控制模块。如图5所示:
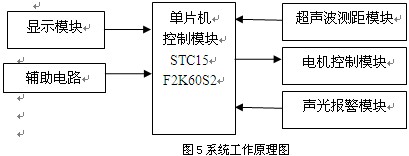
本设计基本原理是通过超声波测距模块检测行车时于前方车辆或障碍物的实时间距并显示在LCD显示器上,本车行车速度实时检测并用数码管实时显示。根据当前车速自动换算出安全车距(车子刹车主要取决于轮胎与地面之间的摩擦力、假设摩擦系数为μ、则刹车距离S=V*V/2gμg=9.8m/s2,这里简化计算采用安全行车常识里保持车距的原则:即保持车距为车速的千分之一),如果实时车距在安全距离之外则无动作;如果小于安全间距则通过蜂鸣器发出报警声以提示驾驶者引起注意;若驾驶者仍无反应导致实时车距进一步减小,则通过单片向电机控制模块给出电机停止命令,强制停止电动车电机的工作。考虑实际应用环境,可以点亮尾灯,当电动车距前方障碍物太近时让电机反转一段时间。
2、设计方案
(1)超声波测距模块:
本设计中超声波测距模块用来检测电动车行车时和前方障碍物或者前车的实时间距。能以直观的数字形式将本车和前方障碍物的距离动态显示在LCD显示器上。探测范围在0.02~4.5 m。
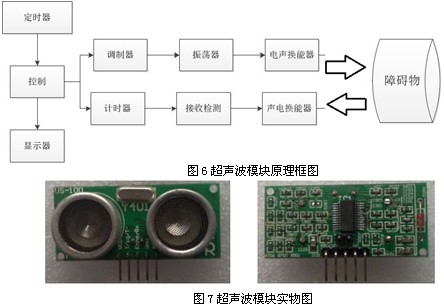
超声测距原理::只需要在Trig/TX 管脚输入一个10US 以上的高电平,测距模块便可发出8个40KHZ 的超声波脉冲,然后检测回波信号。通过单片机计数器获得两者时间差t, 利用公式S=Ct /2计算距离, 其中S为电动车与障碍物之间的距离, C为超声波在空气中的传播速度,当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX 管脚输出。超声波在标准空气中的传播速度为331.45米/秒,由单片机负责计时,单片机使用12.0M晶振,所以此系统的测量精度理论上可以达到毫米级。
本次设计的电动车超声测距系统共有2只超声波换能器( 俗称探头) ,一只声电换能器,一只电声换能器,布置在电动车的前方仪表盘位置上。能检测出前进方向上与前方障碍物距离, 通过与单片机连接的1602LCD显示器显示此距离,系统采用一片STC15F2K60S2单片机对超声波信号进行采集。超声波测距模块原理框图如图6所示。实物图如下图7所示。
(2)电机驱动模块:
本设计用双电机驱动小车作为电动自行车的替代演示方案。为避免分立原件搭建电机驱动电路工作性能不够稳定,易出现硬件上的故障,本设计使用L298N芯片驱动电机 ,L298N具有高电压大电流的全桥驱动芯片,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号,而且带有使能端,方便PWM调速,电路简单,性能稳定,使用比较方便。L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,正好符合我们小车两个二相电机的驱动要求。如图8所示。

L298N模块的In1,In2,In3,In4分别接单片机的P10,P11,P12,P13 接收单片机控制命令,实现启动、停止,正转、反转的功能。
GND,+5V接单片机的GND,+5V向此模块供电。
OUT1,OUT2,OUT3,OUT4分别接小车的左右电机。电源输入端VDD、GND接电源正负,对电机供电。
(3)车速检测模块
光电测速模块如图9所示,两个GND接单片机的GND,OUT1,OUT2分别接单片机的外部中断口P32,P33。通过固定在电机轴上,与电机同步旋转的光码盘与一体化对射接收管检测脉冲数。
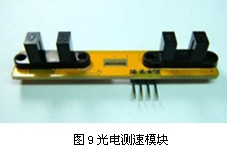
速度计算算法为:轮子直径*3.14/10格码盘=6.5Cm*3.14/10约=2cm 即一个脉冲走2CM距离 具体程序中0.5s计算一次当前车速,count1为左轮接收到的脉冲数具体公式:((count1*2))/0.5S= (count1*4)CM/S。
(4)显示模块
车距显示选用LCD1602,采用标准的14脚接口,第1脚:VSS为地电源,第2脚:VDD接5V正电源,第3脚:V0为液晶显示器对比度调整端,接正电源时对比度最弱,接地电源时对比度最高,对比度过高时会产生“鬼影”,使用时可以通过一个10K的电位器调整对比度,第4脚:RS为寄存器选择,高电平时选择数据寄存器、低电平时选择指令寄存器。第5脚:RW为读写信号线,高电平时进行读操作,低电平时进行写操作。当RS和RW共同为低电平时可以写入指令或者显示地址,当RS为低电平RW为高电平时可以读忙信号,当RS为高电平RW为低电平时可以写入数据。第6脚:E端为使能端,当E端由高电平跳变成低电平时,液晶模块执行命令。第7~14脚:D0~D7为8位双向数据线。
另外引脚"A"和"K"为背光引脚,"A"接正,"K"接负便会点亮背光灯.
1602液晶模块内部的字符发生存储器(CGROM)已经存储了160个不同的点阵字符图形。这些字符有:阿拉伯数字、英文字母的大小写、常用的符号、和日文假名等,每一个字符都有一个固定的代码,比如大写的英文字母“A”的代码是01000001B(41H),显示时模块把地址41H中的点阵字符图形显示出来,我们就能看到字母“A”。
LCD1602在显示之前对正确初始化,其读写操作、屏幕和光标的操作都是通过指令编程来实现的。
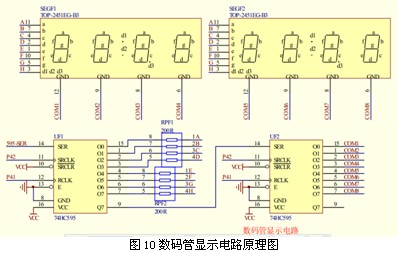
车速显示选用数码管,采用两片74HC595来控制共阳极8段数码管字符显示当前车速,整数部分三位,小数部分一位,显示速度的单位为厘米每秒,在6V电压作用下实测最大速度为7.0cm/s,在5V电压作用下实测最大速度为6.0cm/s,加上负荷速度会有所降低,在演示中采用等比例放大来显示,显示电路原理图如下。
(5)预警模块
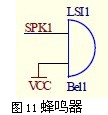
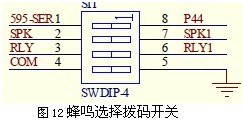
SPK1口接蜂鸣器,当小车离障碍物的距离预定距离时,置SPK1为低电平,蜂鸣器发出报警;当小车距离障碍物的距离预定距离时,置SPK1为高电平,蜂鸣器停止报警。当小车距离障碍物的较短距离时,蜂鸣器放出长报警。如图11、12所示:
蜂鸣器拨码开关一端接单片机P22口一端接蜂鸣器SPK1口,相当于上文提到报警器设置开关。
3、程序流程框图
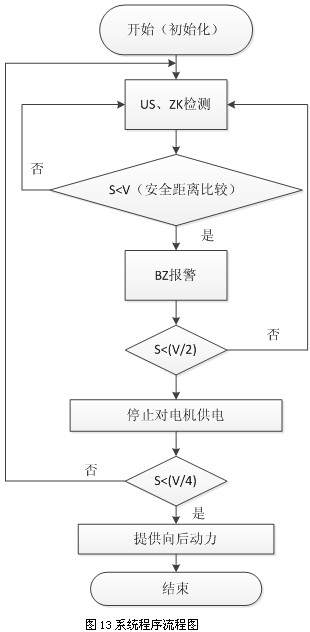
下图13为本次设计的软件系统程序流程图,通过此图表明本设计的核心控制思想。
作品特色
本设计采取了相应的抗干扰措施,保证超声波测距的可靠性和稳定性。实现障碍物的距离精确测试,测距范围2cm-450cm,精度在0.3cm+1%。
这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以用于电动车预警系统,建筑施工工地以及一些工业现场,如:应用于工业生产、无人驾驶汽车、自动作业现场的自动引导小车、机器人等。
行车时的安全车距可以通过单片机检测实时车速及时计算并与超声波测距模块所测量的当前车距做比较。当两车(或车和物)之间的距离小于设定安全距离时,而司机没有作相应的操作(如刹车等)时小车将发出警报。但当两车(或车和物)之间的距离小于最小安全距离时,系统则自动将小车停车。液晶屏上显示安全距离、现在两车相对距离。系统能发出声音预警信息。
相比一辆普通电动自行车2000-3000元的售价,本系统成本控制在200元左右,占总体投资的10%左右。大规模量产后可近一步压缩成本,能安装在各类型的电动车上,向广大电动车驾驶员提供安全可靠的的行车帮助,减少驾驶员的负担和判断错误,对于提高交通安全将起到重要的作用。带来人生和财产的保障,具有广泛的应用前景。
系统演示视频:http://v.eepw.com.cn/video/play/id/2376
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

