
作者:秦皇岛职业技术学院 魏建辉 付帅 毕黎明
指导教师:廉志凯 王冬云
作品简介
一、开发背景
当前,城市交通压力的日益增大,智能交通系统(ITS)的研究逐渐成为了最重要的研究之一。10余年来,交通信号灯的自适应控制作为ITS研究的一部分,也由探索阶段进入到了工程应用阶段。但目前,自适应式的交通信号灯控制系统并没有完全普及,尤其是在同样拥堵的二三线城市,原因在于实施成本高,技术难度大。
基于此,本系统将从降低成本、降低技术难度、易于安装和调试的角度来设计。考虑到当前10余种车流检测技术中,视频检测技术、微波雷达技术、超声波技术的应用比较广泛,故进行比较,如表1。
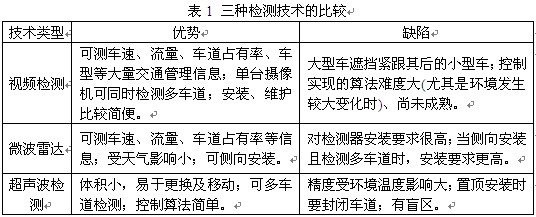
经比较,应用超声波检测技术算法简单;并且对系统调试的要求不高;体积小,便于安装、移动和后期维护。视频技术与微波雷达技术的技术含量高,目前中小型企业还没有跟上,必然影响这两种重要技术的普及。此外,小波束角超声传感器技术日益成熟,故相比之下,超声检测技术的方法更容易普及。
二、功能与使用说明
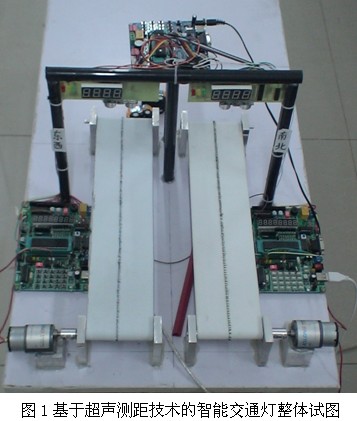
本系统是在十字路口模型上实现的,如图1中,0车道为南北向车道;1车道为东西向车道。功能如下:
(1)车辆计数:通过放置在车道上方的超声波传感器可以记录通过车辆的个数。
(2)自动配时:系统可以根据南北、东西两向车道通车数量情况,自动分配红绿信号灯的时间。例如,两向通车数量差距越大,相对拥堵的那个车道绿灯时间越长。
(3)说明:南北向数码管中显示的为南北向车道测距距离和通车数量;东西向数码管中显示的为东西向车道测距距离和通车数量。
三、结构说明
整个系统由三部分构成:IAP控制模块及两个车辆检测模块。
IAP控制模块为总控制器(图1中上部),控制南北、东西两向的交通信号灯和倒计时器;并通过I/O口控制两个继电器(继电器分别与两个电机相连,然后用电机带动传送带模拟两个车道的通车);以及利用两个外部中断端口来接收车辆计数信号。
车辆检测模块首先通过超声模块和51开发板(如图1中的左右两块)进行实时测距,然后检测车辆通过事件,并把有车通过这样一个事件传送到总控制器中。
平台选型说明
实际路况中一个十字路口要安装4个超声测距模块,由于位置、距离的限制,它们与集中控制器模块肯定是分开的。故集中控制器的用IAP单片机开发板;两个超声测距模块分别用两个SCT单片机开发板。
设计说明
1 整体设计方案
本设计的宗旨为尽量模拟实际路况下的自适应式交通灯控制系统。考虑的实际情况中的安装问题,故本设计将总控制器与超声检测模块分开,分别采用三个单片机系统来完成。系统框图如图2所示。
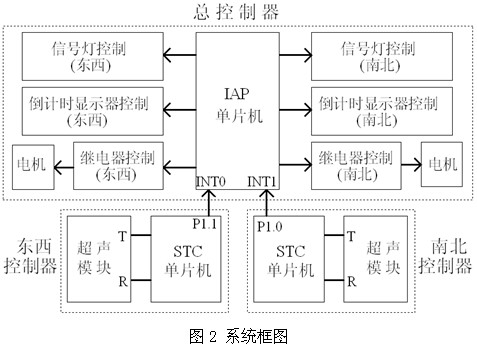
整个系统由三部分构成:总控制器、南北控制器、东西控制器。
总控制器控制南北、东西两向的交通信号灯和倒计时器;并通过I/O口控制两个继电器(继电器分别与两个电机相连,然后用电机带动传送带模拟两个车道的通车);以及利用两个外部中断端口来接收车辆计数信号。
南北控制器和东西控制器分别为两个超声波检测模块,由STC89C52单片机与超声模块构成。主要功能有三个:①利用超声波传感器测距;②通过算法判断出有车辆通过的事件;③将车辆通过事件报告给总控制器。
2 硬件设计
2.1东西向(或南北向)控制器设计
2.1.1功能
东西向(或南北向)控制器设计的功能是利用超声波测量距离,再根据距离的变化判断有无车通过。当有车辆通过时把车辆通过这样的一个事件在STC单片机中进行计数,并同时通过P1.1引脚向总控制器的外部中断引脚发送中断信号,以此来告知总控制器哪个车道有车辆通过。
2.1.2 超声测距原理
东西向(或南北向)控制器设计如图2,STC单片机通过P1.0引脚发出40KHz的脉冲,再通过超声波传感器模块中的驱动模块加到超声波换能器两端。超声波回波接收通过前置放大、限幅放大、带通滤波、检波、积分、整型环节,最后输出到STC单片机的外部中断INT0引脚。这样每次接收完回波,就会以中断的方式通知单片机。
超声测距公式如下,其中,D为测量距离;c为声波传播速度;t为总传播时间。利用单片机的定时器可计算出测量距离。
2.2总控制器设计
总控制器的控制核心是单片机STC15F2K60S2,其控制电路如图3、图4所示,其中,图3为STC15F2K60S2控制电路与继电器模块,图4为信号灯电路与倒计时器电路。
单片机通过P0.0~P0.5引脚控制两个车道的交通信号灯。通过P1口控制数码管的段码,选择了74HC573芯片提高段码的驱动能力;P2.0~P2.2引脚控制74HC138的控制端A、B、C,以此来选通共阴极数码管。本设计中车辆的行驶是通过传送带
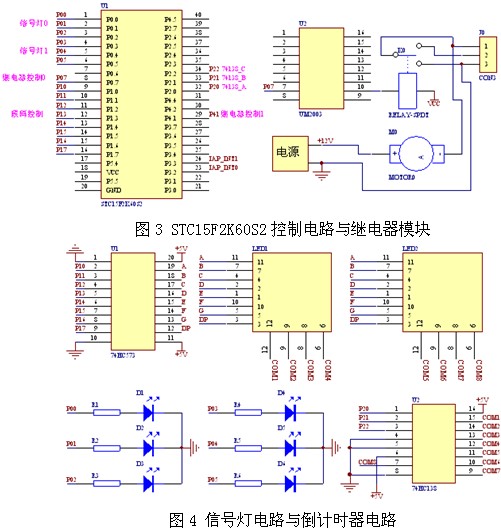
带动小车实现的,传送带由12V的直流减速电机带动,单片机则通过I/O口P0.7和P4.1分别控制两个继电器,从而控制电机的启停。
此外,STC15F2K60S2的两个外部中断INT0、INT1与两个STC单片机的I/O口相连接(如图2)。通过这样的方式总控制器可以接收并记录每一次车辆通过的事件。
2.3硬件的安装
2.3.1车道的安装
本设计中整个模型固定在底板①上,电机座②、支架④材质为铝,支架与底板上的凹槽间采用过盈配合。电机通过联轴器③与带轴承的滚花轴⑤相连。滚花轴再带动传送带,模拟车辆的行驶。如图5所示。

2.3.2超声传感器与信号灯的安装
两车道的交通信号灯与倒计时显示器如图6所示,超声传感器安装在车道的正上方。

3 软件设计
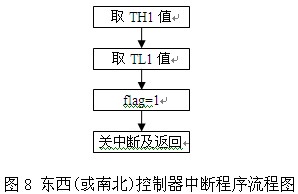
3.1东西向(或南北向)控制器程序设计
主程序流程图与中断子程序流程图如图7、图8所示。在图7中,初始化的内容包括:车辆数、回波接收成功标志清零;超声模块脉冲输入引脚拉低;定时器及中断的初始化。
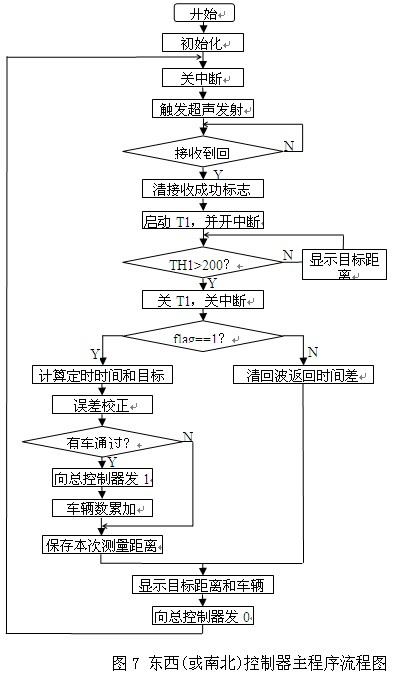
判断有无车辆通过的方法是利用测量距离变化的下降沿,即判断上次超声波检测到的距离和这次的距离。具体为:若本次测距小于14cm,并同时满足上次超声测距值大于14.5cm(超声传感器距车道15cm),则判断为有车通过。
图8为中断子程序,功能为记录超声波从发射到接收所用时间,并置位回波成功接收标志位。
3.2总控制器程序设计
总控制器程序设计中主要包括两类:交通信号灯配时算法和I/O口控制。
单片机STC15F2K60S2通过两个外部中断计算两个车道的通车数量,根据通车数量情况可自动选择5种配时方案。对于I/O控制,包括信号灯及倒计时器控制和对两个继电器的控制。
作品特色
本设计中,整体结构设计、器件选型、算法和安装方面模拟了实际路况中的情况。因此本设计具有可推广性。
1、自动配时:根据车流量自动调整信号灯时间。
2、整体结构设计:模拟了实际十字路口的路况,将集中控制器与超声检测模块分开。
3、器件选型:实际现场中普遍采用的是波束角为30°或15°的超声传感器,本设计中选用的是波束角为30°的超声传感器。
4、算法:实际路况中拥堵的路口车距较近,为此软件设计中充分考虑了这种情况,采用频繁扫描的形式对当前采样的测距距离与上一次采样的测距距离相比较,可如实记录车距较近时的车流量。
5、安装:安装时先确定超声检测模块位置,并安装在支架上,然后再安装到车道上方,这样可提高安装速度,减少交通中断的时间。
系统演示视频:http://v.eepw.com.cn/video/play/id/2726
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

