
作者:青岛大学 邓亚强 张雪华 郑依
指导教师:杨艳
作品简介
开发背景: 随着汽车产业的快速发展,汽车产业目前已经进入调整期,目前,全球石油资源紧缺,且油价不断上涨,冲击了各个行业,尤其是汽车产业,同时人类面对着全球变暖,水平面上升等世界问题。因此未来的汽车将走向电动汽车的时代,而太阳能是目前作为最清洁的能源,对人类来说无疑是一种新型的能源。
简易电动小车的动力来自于太阳能转换的电能,是基于单片机控制及传感器技术,实现的功能是小汽车可自动寻光,并且能够利用红外传感器检测道路上的障碍,它扮演着重要的角色,单片机具有强大的控制功能和灵活的编程实现特性,它已经溶入现代人们的生活中,成为不可替代的一部分。
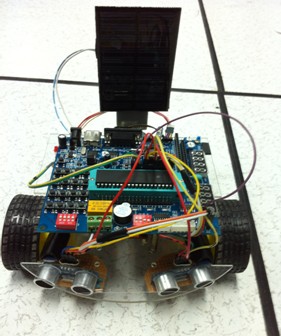
结构功能及使用说明 我们的设计是用IAR15F2K61S2单片机为核心控制元件 ,使用L298N驱动两个直流电机的,控制小车的前进和后退;使用STC89C52单片机控制太阳能电池板自动追光系统,使太阳能电池板始终对准光源,提高系统效率;太阳能充电电路对蓄电池充电;用光电接近开关组成的避障模块能使小车自动避障;小车自动追光自动避障系统和太阳能追光充电系统分由MC9S12XS128和STC89C52控制,避免了信号的干扰;电源模块是用7.2V蓄电池供电,经LM7805、LM7806稳压后为各模块供电;太阳能充电自动追光自动避障电动小车充分利用绿色资源,实现了小车的智能化,有着十分广泛的应用。
平台选型说明
系统选择以STC15F2K61S2芯片为控制核心的单片机开发板为开发平台,经济实用这是STC最新的增强型51,相比较传统51,有以下优点:1T STC-Y5 内核,比传统51快6-12倍;内部RAM扩大,传统51为128字节或256字节,它达到了2.25KB;内部高精准可调RC振荡器;有一个16位自动重载定时器,串口波特率设置更灵活;有片内SPI控制器,速度可达1/4主频速度;有片内PWM/PCA控制器,可捕获外部缓冲或这产生PWM。功能强大,方便使用。
设计说明
1.系统设计
1.1.整体方案设计
此电动小车由自动追光自动避障系统和自动追光太阳能充电系统组成。自动追光自动避障系统用STC15F2K61S2单片机为核心器件,检测光电接近开关和自制追光传感器输入信号执行相应的程序,控制电机转动的方式,达到小车自动追光自动避障的功能。太阳能自动追光充电系统用TC15F2K61S2单片机为控制器件,检测自制追光传感器输入信号执行相应的程序执行电机正反转程序,电机正转或反转,控制对光装置转动,使太阳能电池板始终正对光源。
1.2.1控制器模块
方案1:采用可编程逻辑器件CPLD作为控制器。CPLD可以实现各种复杂的逻辑功能、规模大、密度高、体积小、稳定性高、IO资源丰富、易于进行功能扩展。采用并行的输出方式,提高了系统的处理速度,适合作为大规模控制系统的控制核心。但本系统部需要发杂的逻辑功能,对数据的处理速度的要求也不是非常高。从使用经济的角度考虑我们放弃了此方案。
方案2:采用STC15F2K61S2单片机。内部高精准可调RC振荡器。有一个16位自动重载定时器,串口波特率设置灵活;有片内SPI控制器,速度可达1/4主频速度;有片内PWM/PCA控制器,可捕获外部缓冲或这产生PWM。因此采用方案二。
1.2.2电源模块
方案1采用若几节干电池串联供电。干电池有较强的电机驱动能力以及稳定的电压输出性能。但是,携带电池盒会影响整体布局,在小型电动车上使用不方便,且不能很好的利用太阳能充电系统。因此我们放弃了此种方案。
方案2:采用7.2V蓄电池为系统供电。7.2V电压蓄电池经过LM7805、LM7806稳压后,可为电机的驱动和单片机系统的工作提供稳定的电压,且携带方便,便于调整布局,综合考虑,选用了此方案。
1.2.3避障模块
方案1:用超声波传感器进行避障。超声波传感器在避障系统中普遍使用,其避障性能很好,接收与发射信号不易受外界干扰,可以很好的实现避障的功能。因此选用此方案。
方案2:使用实验室已有的光电接近开关作为传感器进行避障,用微动开关改良避障性能。光电接近开关检测距离长,检测对象广泛,响应速度快,分辨能力高,且不受磁场和振动的影响。但是成本高,硬件电路复杂。
1.2.4小车电机模块
1.2.4.1电机的选择
方案1:采用步进电机作为该系统的驱动电机。由于其转过的角度可以精确的定位,可以实现小车前进路程和位置的精确定位。但是,步进电机的输出力矩较低,随转速的升高而下降,且在较高转速时会急剧下降,其转速较低,不适合于小车等有一定速度要求的系统。
方案2:采用直流电机。直流电机转动力矩大,体积小,重量轻,转配简单,使用方便。由于其内部由高速电动机提供原始动力,可以产生大扭力。能够较好的满足系统要求,舵机可用于控制前轮转动角度,可实现避障功能。因此我们选择此方案。
1.2.4.2电机驱动模块
方案1:用L298N驱动两台直流减速电机的电路。引脚A,B可用于PWM控制。如果机器人项目只要求直行前进,则可将IN1,IN2和IN3,IN4两对引脚分别接高电平和低电平,仅用单片机的两个端口给出PWM信号控制使能端A,B即可实现直行、转弯、加减速等动作。控制简单,易于操作。
方案2:直流电机用分立元件构成驱动电路。由分立元件构成电机驱动电路,结构简单,价格低廉。但是这种电路工作性能不够稳定,结构复杂。综合考虑,选择方案1。
1.2.5小车自动追光模块
方案1:使用光敏电阻检测光源,反应灵敏度好,成本低。电路缺点是检测距离范围有限。
方案2:使用光电三极管自制追光传感器。可靠性良好,且便于安装在小车上。硬件电路复杂,在较短时间内难以完成制作。因此选用方案1。
1.2.6太阳能板自动追光模块
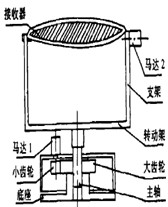
方案1:自制新型自动跟随器(图1-2)和MC9S12XS128单片机控制。其原理是光源发生偏移的时候,控制部分发出控制信号驱动马达1带动小齿轮转动,大齿轮固定则小齿轮自转的同时围绕大齿轮转动,因此带动转动架以及固定在转动架上的主轴、支架以及接收器转动;同时控制信号驱动马达2带动接收器相对与支架转动,通过马达1、马达2的共同工作实现对光源方位角和高度角的跟随。但此方案制作复杂,成本较高,由于时间仓促,我们只能放弃此方案。
方案2:自制自动追光传感器和简易机械装置,用STC15F2K61S2单片机控制。此方案由光电三极管自制一传感器采集信号供给STC15F2K61S2单片机控制步进电机的转动方式,避免了与追光避障系统的信号混淆。用轴连接于步进电机伸出轴,太阳能板固定于轴上,步进电机旋转即可控制太阳能板自动追光,该方法简单易行,独立控制,可靠性高,由于故选用此方案。
1.2.7太阳能充电模块
方案1:恒流充电。恒流充电方式是一种简单的充电方法。但是,恒流充电有其局限性:对电池过充电就会造成电池寿命的缩短,而过小电流又会延长充电时间。我们不考虑用此方案。
方案2:恒压充电。太阳能电池板可以产生3—6V的空载输出电压,接1.2可充电镍镉电池后,输出电压为2V,正好供给电池充电,同时串联一个LED灯,指示充电状态,综合考虑,选择此方案。
作品特色
小车硬件全部由学生亲自动手完成。电源电路包含电量指示灯,当电量不足时及时提醒充电。太阳能既是一次能源,又是可再生能源。它资源丰富,既可免费使用,又无需运输,对环境无任何污染。为人类创造了一种新的生活形态,使社会及人类进入一个节约能源减少污染的时代。简易电动小车的动力来自于太阳能转换的电能,具有深刻的意义和价值。基于单片机控制及超声波,实现的功能是小车可自动避障。基于光敏电阻及单片机实现自动寻光。
系统演示视频:http://v.eepw.com.cn/video/play/id/2735
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

