
作者:山东理工大学 王新 张学武 张其存
指导教师:曹立军 刘剑平
作品简介
开发背景
特别是近些年来,我国经济业务日益呈现多演化、复杂化发展趋势,市场竞争压力日益增大,档案早已成为各级管理部门进行经济分析、决策的重要依据,在市场经济发展中占据着十分重要的地位。而档案安全问题也随之突显,例如06年俄罗斯国家档案馆失窃案就对国际档案安全问题产生了很大影响。因此,加强档案管理工作人力、物力、财力等方面的投入,进一步加强档案保存的安全性和使用的高效性早已成为我国社会各界高度关注的重要问题。
结构说明
一、车体部分:车体采用车轮式行进方式。车轮式行进方式结构简单,移动速度快,控制转向方便,转弯半径小,运动过程中能量利用率高,机构简单,对于本RFID档案检索机器人而言,一般应用于大型档案馆,公司家庭等的档案、图书整理,行走路面相对平滑,障碍较少,因此选用车轮式行进方式。
二、升降台部分。采用丝杠导轨升降机构。
滚珠丝杠是将回转运动转化为直线运动的理想产品。滚珠丝杠由螺杆、螺母和滚珠组成,由于具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工业设备和精密仪器。


三、伸缩臂部分。采用齿轮齿条伸缩结构。
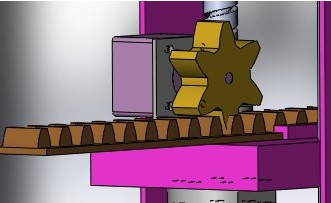
齿轮齿条式传动方式承载力大,传动精度较高,可达0.1mm,可无限长度对接延续,传动速度高,机构简单,正适合RFID档案检索机器人对精度和效率的要求,因此选用齿轮齿条式传动方式。
四、检索器部分。采用RFID技术。
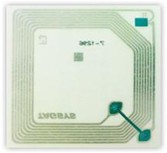
电子标签的特性
数据存储容量更大(1bit—1024bit),数据可随时更新,可读写;读写速度快、使用方便、安全、耐用。
五、机械手部分。采用2自由度机械式夹持器。
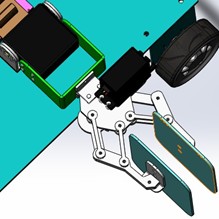
机械爪的设计要求:具有满足作业要求的足够的夹持(吸附)力和所需的夹持位置精度;应尽可能使其结构简单、紧凑、重量轻、以减轻手臂的负荷。机械式夹持器动作灵活,结构简单,通用性强,因此选用机械式夹持器。
功能及使用说明
RFID档案检索机器人的功能是找出并拿回读者所需档案。其功能实现过程如下:读者用键盘将档案编号输入机器人,机器人会循迹到达书架并借助RFID阅读器予以找寻。当机器人扫描完一层档案架后会利用升降台的升降继续扫描下一层档案。当发现所寻档案的电子标签信息后,机器人会通过机械手夹持器将其夹住并取出,然后上旋90度以保证档案不会掉落,然后返回送到读者手中。
平台选型说明
选用的是大赛指定的单片机开发板
1. 采用宏晶公司最新STC15系列IAP15F2K61S2 芯片。ISP/IAP,在系统可编程/在应用可编程,无需编程器,无需仿真器。可当仿真器使用。
2. 增强型8051 CPU,1T,单时钟/机器周期,速度比普通8051快8-12 倍
3. 61K字节片内片内Flash程序存储器,擦写次数10万次以上
4. 片内大容量2048字节的SRAM
5. 大容量片内EEPROM,擦写次数10 万次数以上
6. 共8 通道10 位高速ADC,速度可达30 万次/秒,3 路PWM 还可当3 路D/A使用
7. 共3通道捕获/比较单元(CCP/PWM/PCA)
8. 内部高可靠复位,8级可选复位门槛电压,彻底省掉外部复位电路
9. 内部高精度R/C 时钟,内部时钟从5MHz~35MHz可选,相当于普通8051的60MHz~420MHz
10. 两组高速异步串行通信端口(可同时使用),可在5 组管脚之间进行切换,分时复用可当5组串口使用。
11. 一组高速异步串行通信端口SPI。
12.各种接口扩展齐全。
13. 一根优质USB 线实现系统供电、程序下载、通信功能。
设计说明
设计方案:
在当今社会飞速发展,情报信息愈来愈重要的情形下,档案管理部门的保密性,便捷性显得尤为重要。
虽然档案管理部门有相关的档案管理规定,但是查阅档案也还是必须有人工进入档案室进行查找,取阅,在某些不允许人进入档案室的特殊情况下,现在的管理制度,显然是不够的。
另外,类似档案馆这一类的情况很多,比如,就是什么特殊要求也没有,就将它作为一种服务机器人使用,当您需要某件物品,完全可以让其帮您找到并拿到您身边,而您就可以只需动动手指头就能享受这美好的贵族生活了。
还有一种情况,当一个人想要获取某件物品,而这件物品又需要寻找,甚至其存放地点不方便让这个人进入,这时我们该怎么办呢?难道就这样放弃了吗?不用。这种情况下我们的RFID检索取送机器人就派上用场了。我们的RFID检索取送机器人不仅可以可以轻松的实现对所要寻找的物品的定位,而且不管该物品放在高处还是低处,我们的RFID检索取送机器人都可以将其轻易取出并送到这个人的手里。

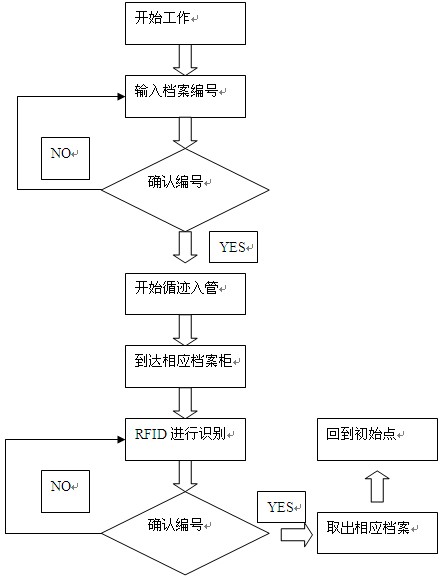
RFID检索取送机器人的工作模式为:“欲查阅档案的人员输入要查看的档案编号,确定后→机器人自动进入档案室→到达相应档案柜→开始检索→取出相应的档案→回到初始点。”
设计原理:
部分原理图:
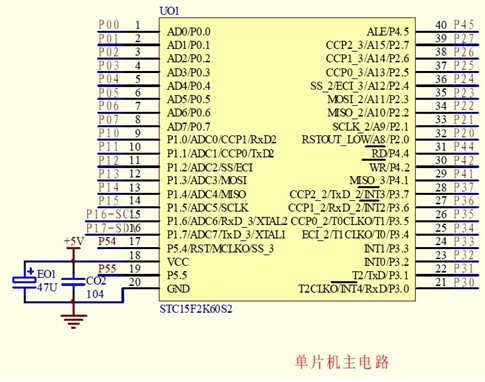
单片机原理图:
选用的是大赛指定的单片机开发板:STC15系列IAP15F2K61S2 芯片。
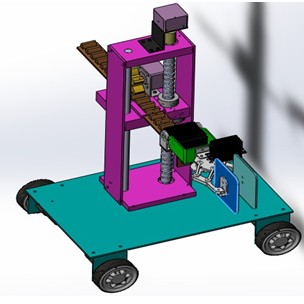
机械车装配图:
车体部分:包括车轮、底板、驱动电机等;
升降台部分:包括左右竖板、上下横板、移动平台、丝杠、螺母、光杆、z轴步进电机、电机支架等;
伸缩臂部分:包括X轴电机、齿轮、齿条、RFID阅读器等;
机械手部分:包括旋角控制舵机、夹持器开合舵机、夹持器。
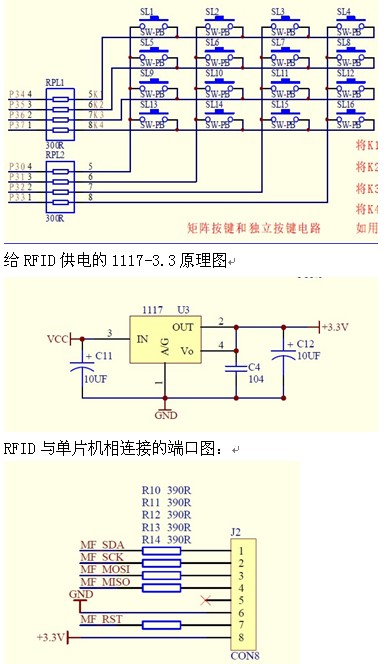
按键原理图:
作品特色
先进性:在我国,对于RFID档案检索机器人的研究还处于比较初级的阶段,本机器人采用RFID技术来完成对档案的识别与拿取,具有先进性。而且在某些不允许人进人档案馆的特殊的场合下,本作品更具有先进性,比传统的条形码识别速度快,精确。
实用性:本机器人除可用于档案管理外。还可应用于图书馆、公司单位、家庭等来完成档案、图书检索和运取工作,具有很强的实用性和高效性。
创新性:本机器人首先引入采用了独特的滚珠丝杠导轨机构来代替机械臂,使机器人结构更简单更高效也更实用;本机器人还采用了先进的RFID技术来代替传统的条形码识别或文字识别,这是图书档案界未来发展的必然趋势。
系统演示视频:http://v.eepw.com.cn/video/play/id/2645
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

