
作者:宿州学院机械与电子工程学院 向若杰 尤清春 叶芳
指导教师:郝保明 汪材印
作品简介
近年来,两轮自平衡电动车以其行走灵活、便利、节能等特点得到了很大的发展。国内外有很多这方面的研究,也有相应的产品。

本次参赛作品车模及控制台
结构,功能,使用说明:
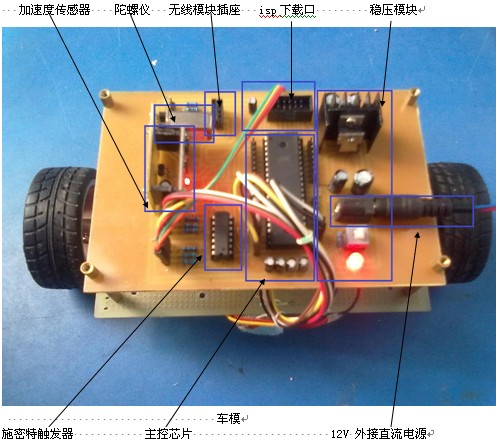
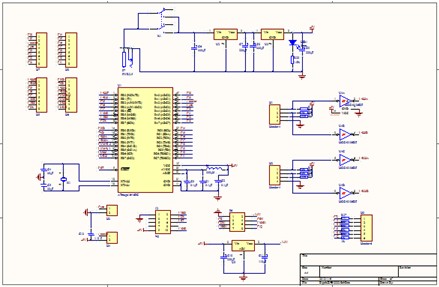
一、主控模块
1、小车主控模块主要由稳压模块、isp下载口、无线模块、加速度传感器、陀螺仪、74ls04s施密特触发器、电源指示灯组成。其中主控芯片的主要功能是采集加速度传感器、陀螺仪、光电编码器、以及无线模块的数据进行运算,然后进行反馈。不仅是主要的数据运算中心又是控制中心。如图:
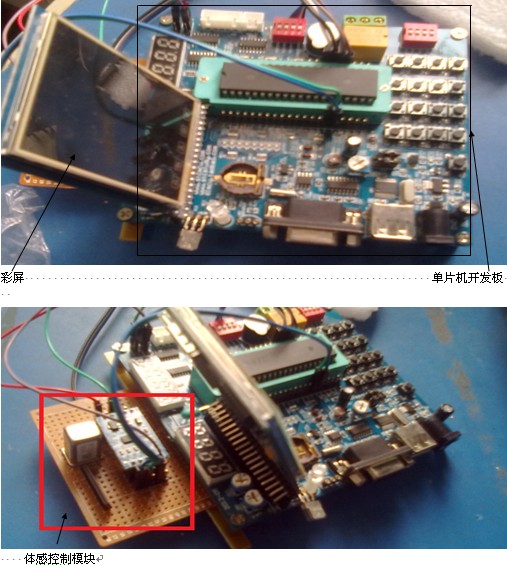
2、控制模块主要由15系列单片机开发板、彩色电容屏、体感控制模块构成。主要功能是采集体感控制模块数据进行计算通过彩屏显示X、Y轴数据。并通过无线发射模块控制小车运动。如下图:
附:由于本次比赛必须使用规定的开发板,因此原本手握式体感控制器,现在只能使用双手控制。
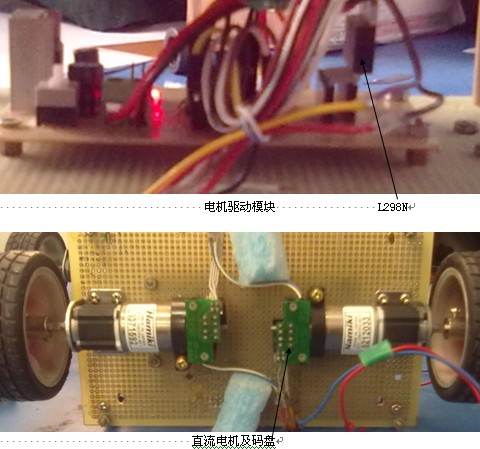
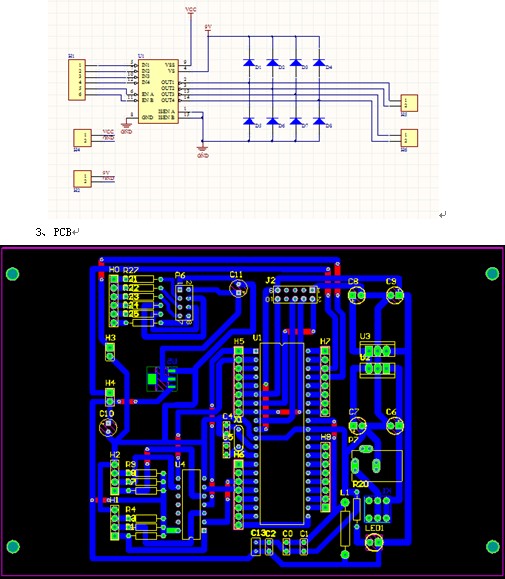
二、电机驱动及光电码盘
电机驱动采用L298N驱动芯片,独立5V电压源供电。可同时驱动两个电机正反转。调速采用快速PWM调制。
本次参赛所用码盘为90度切角互补码盘,不仅在测速的同时,还可以根据相位测出小车运动的方向。
如下图:
平台选型说明
本作品基于STC15F2K61S2芯片为控制核心的开发板加以扩展,添加彩屏显示模块,体感控制模块,无线收发模块。
设计说明
本作品分为两轮自平衡车和体感控制两个部分:
一、两轮自平衡车
1、设计原理
本作品采用MMA7361三轴加速度传感器和EWTS82陀螺仪,经卡尔曼滤波测出倾斜角度,经A/D转换后由主控执行PID算法计算出左右轮电机的PWM值。由安装在左右两个电机上的四对光电传感器以及两个90度切角光电码盘测出小车行驶速度以及行驶方向,即:当小车向某个方向倾斜时,就向此方向加速,使小车纠正到平衡状态。通过调整小车左右轮速差即可调整小车行驶方向,通过给小车预置前后倾角即可实现小车前后移动。算法如下:
PWM =
K_angle*angle *K_angle_AD+
K_angle_dot*angle_dot *K_angle_dot_AD +
K_position*position *K_position_AD +
K_position_dot*position_dot_filter*K_position_dot_AD;
2、原理图
4、设计方案
二、体感控制
1、设计原理
体感控制部分是由MMA7361加速度传感器以及EWTS82陀螺在给定的15系列单片机开发板的基础上经卡尔曼滤波后得出X,Y轴方向的角度,控制小车运动。
2、使用说明
体感控制就是通过身体的倾斜方向来控制小车运动模式。
向前倾斜—小车前进
向后倾斜—小车后退
向左倾斜—左转弯
向右倾斜—右转弯
只需打开电源,无需调试,即可使用。
3、由于主控台是在给定的单片机开发板的基础上设计,因此无需再制作PCB板。同样这一原因也导致主控台显得很笨重。
作品特色
目前对于固定的机械臂的研究较为成熟,而对于具有移动平台的智能移动机器人的研究却甚少,两轮自平衡小车是移动机器人研究中的一个重要领域。两轮自平衡机器人两轮共轴、独立驱动、车身中心位于车轮轴上方, 通过运动保持平衡, 可直立行走。由于特殊的结构,其适应地形变化能力强,运动灵活,可以胜任一些复杂环境里的工作。另一方面, 从研究意义上看,自平衡小车系统是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合复杂非线性系统。
本设计是通过体感控制以达到通过身体行为控制小车运行,改变以往的通过手扶控制。以达到更加自然地使用这一代步工具。
系统演示视频:http://v.eepw.com.cn/video/play/id/2772
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

