
作者:武昌理工学院 褚翔翔 余祖建 张鹏
指导教师:邹熙 唐穗欣
作品简介
作品图片:
平台选型说明
开发平台:本系统是以STC15F2K60S2为开发平台,该平台定时器丰富,中断源多,提供的功能较多。对于编写程序和开发系统,其灵活性强。
设计说明
本系统以STC15F2k单片机为控制内核,以履带式小车模型作为基本的运动部件。系统搭载了HC-SR04超声波模块并实现自动测距与在固定距离停车的功能。
在小车前部增加了ST188反射式红外光电传感器用以小车循迹。系统还加了遥控模块用以无线遥控其运转。增加的颜色传感器来自动停还是运动。
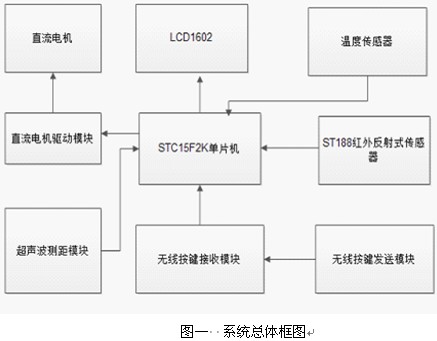
一、系统总体框图:
二、系统方案论证:
1.通过霍尔传感器与红外避障模块检测的信息通过STC15F2K60S2单片机处理进而控制小车避障和测距显示。
2.通过无线遥控键盘将信息送给单片机处理进而控制小车的运动,通过超声波模块来实现小车与前方障碍物的测距功能。
论证比较:方案一中的处理比较单一灵活性不大,精度不高;方案二通过无线键盘控制小车的运动,超声波测距程序的操作的灵活性高,精度高。故选择方案二。
三、各模块的实现:
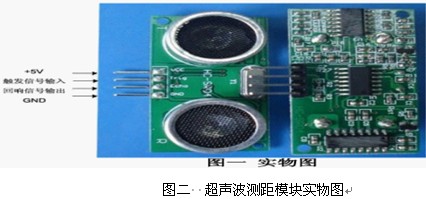
1.超声波测距模块
工作原理:使TRIG=0,最少延迟10us的时间,然后TRIG=1,超声波模块此时开始启动一个测量周期,发射若干个40khz的声波,然后启动10ms的定时器等待反射波,如果收到反射波,模块的ECHO输出一个宽度为150us的负脉冲,从TRIG=1到ECHO=0的时间即为从发射到收到发射波的时间.
2.红外避障模块
当在一定的距离内红外避障模块检测到黑带是,OUT引脚输出低电平;而当没有检测到低电平OUT输出高电平;模块图如下:

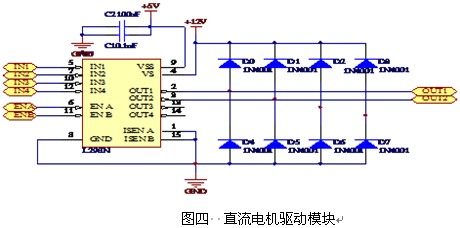
3.直流电机驱动模块
我们选用的是L298芯片作为直流电机的主控芯片,四路输出分别接两个电机,另接的8个二级管是作为续流于保护作用。四项控制信号分别接IN1~IN4。不同的二进制编码分别控制电机的不同运动。供电电源有滤波处理,使芯片工作更稳定。
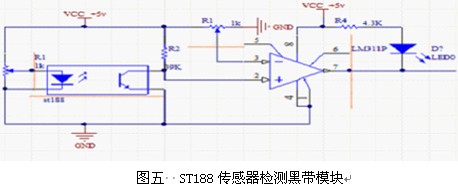
4.ST188反射式红外传感器模块
我们利用黑色对红外线具有吸收效果的原理,设计了黑带检测电路,用以小车寻迹。为了产生“低”,“高”两种状态,我们在传感器电路后接了比较器来输出高低电平。为了便于编程处理,能够产生下降沿,我们在比较器的输出端接了74LS00与非门。
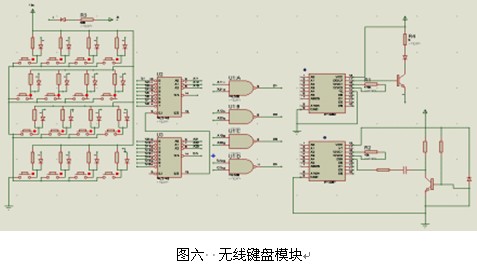
5.无线键盘;
通过采用TP2262和TP2272及74LS148优先编码器实现无限按键模块和接受模块,,接受模块输出4位二进制编码共16种状态,分别对应4*4矩阵按键的序号。TP2262接受频率 和TP2272的发送频率要保持一致实现信号的传送与接收。![]() 。TP2262和TP2272的振荡电阻配对。具体电路图如下:
。TP2262和TP2272的振荡电阻配对。具体电路图如下:
四、程序设计流程图:

作品特色
本系统能够通过无线键盘遥控操纵小车启动,停止,加速,减速,左右转弯,最大的特色在于利用超声波测距实现较为准确的停车定位。
系统演示视频:http://v.eepw.com.cn/video/play/id/2672
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

