
介绍: 康复训练机械臂作为医疗机器人的一种,是综合了机械、电子等技术领域的机电一体化系统,它将机械、驱动、传感器和控制系统有机的融为一体。
本文介绍了一种针对中风病人上肢康复训练机械臂外骨骼本体的控制系统的设计,本设计采用 NI 公司的 CompactRIO 作为硬件平台,配合 LabVIEW 图形化编程界面实现患者手臂康复训练所需的肩关节、肘关节、腕关节的各种运动及它们的组合运动。
本设计支持多种被动康复训练模式,可以通过电脑界面实现对患肢关节的手动控制;可以储存一些简单的康复训练动作,反复执行这些动作;也可以利用患者的一侧健康手臂自主运动信息来直接驱动患者另 一侧患肢作随动康复运动。本课题基于 CompactRIO 控制平台,通过传感器和气动控制元件的选择,以及 控制硬件电路的设计和 LabVIEW 软件的设计,最后通过不断的联机调试和程序改进,实现了患者上肢的被动(全助力)训练、半主动(半助力)训练和主动(阻力)训练。
应用方案:
1. 控制系统总体概述
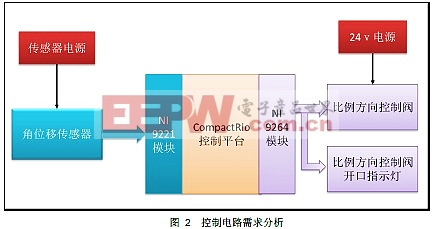
康复训练机械臂的机械本体为穿戴式的外骨骼结构(如图 1 所示),采用气压驱动,需要实现对肩关节、 肘关节、腕关节处 6 个自由度的控制。为了实现康复机械臂的精确控制,采用了角位移传感器测量各关节的位置信息,同时利用 CompactRIO 的 NI 9221 模拟输入模块实时采集电位器的电压值,通过数据转换和 处理可得到各关节当前所处的位置;然后 NI 9264 模拟输出模块,通过比例方向控制阀与角位移传感器组成的闭环系统,实现对患者患肢的运动控制。

由于 CompactRIO 平台可以通过 NI 9221 模块和 NI 9264 模块直接进行模拟输入(AI)和模拟输出(AO),所以控制电路得到了大大的简化。控制电路的需求分析如图 2 所示:
文章全文,回复可见:
——回复可见内容——
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

