
介绍:
随着社会老龄化的推进,老年人群的看护问题将会成为未来社会一个越来越大的负担。智能轮椅采用先进的自主机器人技术,能代替护理人员完成对老年以及残疾人群的看护,节约社会可用劳动力。
作为一个人机共享控制系统,智能轮椅里存在着机器控制器与人类用户两种控制器,如何分配两者之间的控制比例是智能轮椅研究中一个关键的课题。
本课题围绕智能轮椅研究中的核心问题,研究了共享控制系统结构设计、人机权重分配算法、PC 控制模式的开发设计以及实验系统软硬件开发等相关问题。
本课题组通过与美国国家仪器有限公司(NI)的合作,充分利用其图形化编程软件平台 LabVIEW 2011等软件和 DANI 硬件设备,建造了虚拟智能轮椅平台的软硬件系统。
应用方案:
本课题设计了一种分别具有纯手动控制模式、人机共享模式以及 PC 控制模式的智能轮椅控制器系统。
具体介绍如下:
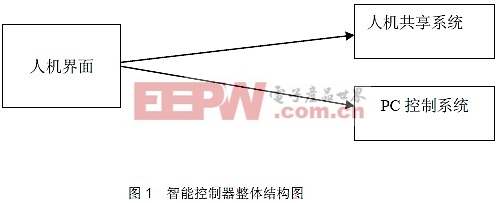
图 1 显示了智能控制器整体结构图。人机共享模式下,系统能够根据周围障碍物信息来判断用户的控制指令是否存在不安全因素,然后通过人机权重分配器来计算出人机的各自控制权重。如果用户可以较安全地控制轮椅,则系统赋予用户较高的权重;相反,如果用户无法安全地控制轮椅,则系统会降低用户的控制权重,同时,提升机器的权重,由机器主导智能轮椅的控制,由此提升安全性,避免不安全情况的发生。PC 控制模式下,系统通过声纳等传感器获得周围环境的信息,与上位机进行通讯,通过获得的上位机 控制信息,来控制智能轮椅运动。纯手动模式下,控制任务完全交由用户处理。相对于一般的轮椅,智能轮椅有着的巨大优势。
1. 人机共享系统
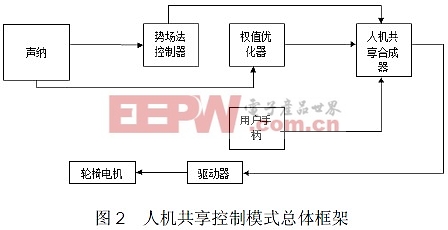
图 2 显示了人机共享控制模式总体框架。用户手柄控制与控制器控制所产生的控制信号,以及传感器数据都输入权值优化器,优化器通过计算传感器所获得的数据,来判断智能轮椅所处的状态,根据距离的值来计算得到人机的权值分配结果,并输入到人机共享合成器中。
2. PC 控制系统
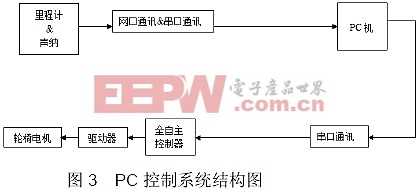
图 3 显示了 PC 控制系统结构图。下位机通过网口通讯与串口通讯向上位机发送信息包,其中包含的是声纳传感器所收集到的距离等信息以及下位机所处的位置等信息。同时,上位机通过分析下位机所发送得到的数据,来生成控制信息,以一定的格式形成信息报发往下位机。如此一来,下位机与上位机成功通讯,实现下位机(DANI)的 PC 控制模式。
文章全文,回复可见:
——回复可见内容——
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

