
介绍:
论文以 NI LabVIEW Robotics Starter Kit 2.0 硬件平台为基础,通过无线通信模块和 IP 摄像头,设计开发了一个视觉型移动机器人,利用 LabVIEW Robotics 2011 软件环境编写软件,对硬件进行控制,实现对周围环境的物理信息的获取和监控。其成果可作为移动式机器人实践教学平台,便于学生学习和进行实验研究;也可用于运动场、机场等路况相对平整环境下的安保巡逻,通过实时采集图像信息,解决固定摄像头的死角问题,提高环境监管质量。
应用方案:
1. 系统的整体方案
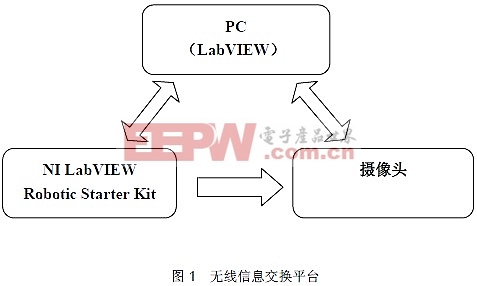
在 NI Robotics Starter Kit 2.0 硬件平台上通过无线路由器搭建无线信息交换平台,利用无线网络实现电脑、机器人、摄像头三方的信息交互实现对机器人的控制和图像传输。无线信息交换平台如图 1 所示。
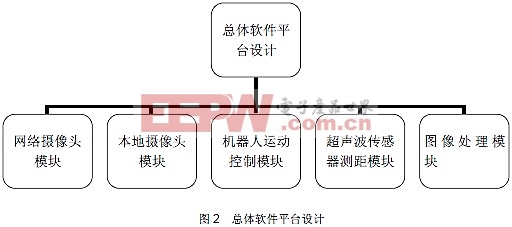
总体软件设计包括五大模块,分别为网络摄像头模块、本地摄像头模块、机器人运动控制模块、超声波传感器测距模块及图像处理模块,如图 2 所示。
其中,将网络摄像头固定在机器人上,随着机器人的控制移动,通过网络访问实现实时的图像采集及环境监控;本地摄像头模块可实现实时观察 USB 摄像头视野范围内的环境情况及机器人运动状况,根据周围环境的实时观测,对机器人运动路线予以调整,保证机器人顺利到达预定目标;机器人运动控制模块是通过 NI LabVIEW 2011 软件设计编写运动控制程序,实现对机器人的转弯、直行控制,以达预定目标;超声波传感器测距模块主要是实现对传感器测量范围内的障碍物距离测量;图像处理模块主要是对图像进行二值化处理。
文章全文,回复可见:
——回复可见内容——

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

