
既然是时尚家电,免不了长篇巨幅,大家要有心理准备,以足够的耐心看完哈!
(由于图片压缩的关系,有些字体模糊,可用鼠标左键点中不放滑动一下,即可看大图,清晰些。)
一、外观及技术参数
(特别说明:介绍该产品功能仅仅为了便于理解其电路结构,绝非为其广告、肯定其功能效果。)
厂家宣传视频(感兴趣网友可以看)http://v.youku.com/v_show/id_XNDM4MzQ5MTE2.html
外包装:


产品是钢琴烤漆晶耀黑镜面,看起来科技含量十足:

外部结构:












二、主要功能(摘编厂家介绍,观看了视频的网友可以飘过此段图片)











三、电路控制原理:
1、系统组成原理 扫地机器人由5部分组成:系统主控制部分、执行电机部分、传感器部分、输入输出部分和电源部分。主控系统使用ARM单片机STM32F103 VBT6,包括红外遥控接收模块,对输入输出器件的操作,对执行电机的控制,以及对传感器的响应等。执行电机部分是机器人的主要构成部分,包括行走子系统和吸尘子系统。行走结构采用轮式结构,圆形壳体,底盘为三轮电动小车,前轮为万向轮,后面两轮由两个电机独立驱动。吸尘系统用电机带动清扫刷转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造的吸力将灰尘吸入灰尘存储箱中。行走滚轮电机、吸尘电机和毛刷电机使用的都是无刷直流电机;传感器部分主要为了保障机器人能够安全地工作;输入输出部分包括遥控子系统和显示子系统,语音系统能够较好地实现人机交互的功能;电源部分采用可充电的14.4伏2000mAH镍氢电池组。
其系统原理框图如下所示:

2、MCU控制器系统
基于扫地机器人自身体积尽可能小的原则,将控制器核心系统、传感器系统、行走驱动及相关电路集成在一块电路板上。红外反射式传感器和接触传感器组成多传感器系统,检测信号经预处理电路处理后送控制器;采用ARM的8位单片机STM32F103 VBT6作为控制器,控制器对传感器信号加以判断,根据判断结果,选定相应的控制策略,并控制语音系统发出相应的报警信号;在相应的控制策略下,对行走直流电机两轮独立驱动,实现避障功能;同时,控制器控制小型风机真空吸尘系统对经过的地面进行必要的清扫。
3、传感器系统(障碍物检测模块)
传感器系统采用红外光电传感器、接触传感器等构成多障碍物检测系统。
红外反射式传感器:
由8路红外发射与接收对管组成检测单元,用于主动探测机器人周边障碍物和地面落差。该电路简单、安装调试方便。其中在机器人左前方和右前方各安装2路,实现周边障碍物的检测;另4路分别安装在机器人前端左下方和右下方,用于检测地面是否有台阶等落差,防止机器人跌落。红外反射式传感器具体工作过程为,发现障碍物时,发射管发出红外信号遇到障碍物反射回来,接收管接收到反射信号后导通,则信号处理电路的输出端变为低电平,该低电平直接送入MCU控制器的一个端口,当控制器检测到这个端口的低电平变化时则表明该方位发现障碍物。 通用红外遥控系统(主机与充电器、虚拟墙之间的联系)由发射和接收两部分组成。充电器、虚拟墙采用台湾义隆的单片机EM78P173NSO14J进行管理;在遥控器上使用单片机进行红外功能编码;在机器人上,由单片机STM32F103 VBT6处理任务,4个红外接收管的信号通过或非门与MCU相连,在接收到任意方向的红外线信号时MCU都会工作。 程序设计机器人实现遍历无障碍的区域,这就要求机器人在绕开障碍物以后要回到原来的行进路线上去。为实现这个目标,需要记录下机器人在绕障过程中偏离原来路线的路程,利用安装在行走滚轮电机轴上的光电编码器来实现这一功能。用作光电编码器计数开始和结束的作判断依据,光电编码器的输出端接单片机的外部中断INT0。 接触传感器检测模块:
接触传感器具有检测范围大、信号无需处理、占用控制器资源少等一系列优点。
作为最后一道防线,选择2个小型接触开关作为接触传感器,安装在机器人前端的防撞挡板后面,作用在于通过轻微的碰撞接触,检测那些未能被红外反射式传感器检测到的杆状或微小障碍物,如座椅腿等。
在两只行走滚轮的机构上还固定有2个接触传感器(限位微动开关),当行走滚轮一旦悬空,或机器人脱离地面,这个开关立即断开,切断行走系统电机和清扫系统电机电源,停止工作。
灰尘感应眼:
在机器人底部的灰尘收集口内,有一组光电传感器(第8张图),当感应到灰尘较多时,会给MCU一个信号,系统程序会指令清扫系统电机转速加快,即实行变频打扫。
4、驱动系统
移动机构是扫地机器人的主体,决定了清洁机器人的运动空间。执行电机部分是吸尘机器人的主要构成部分,包括行走驱动子系统和吸尘子系统。
行走结构采用轮式结构,圆形壳体,底盘为三轮电动小车。前面两滚轮由两个电机独立驱动,后轮为万向轮。 单片机STM32F103 VBT6的I/O口只需要给出相应信号,由三极管D882做电子开关驱动行走电机;场效应管FR024N驱动吸尘风机;场效应管FDS8958A驱动清扫刷电机。
吸尘系统用电机带动清扫刷的转动,清扫灰尘并将灰尘集中于吸风口处,由吸尘机构制造强大的吸力将灰尘吸入灰尘存储箱中。滚轮电机、吸尘电机和清扫刷电机使用无刷直流电机。
四、拆机细节:
1、主机
首先打开机器人底部的电池盖板,取下电池组,对机器断电:



电池组由12只镍氢电池串联组成,14.4V/2000mAH:

取下旋转清扫刷:


卸下防撞挡板的边框固定螺丝:

移开防撞挡板,可以看见底部4组红外感应头(左前方2组、右前方2组),起防跌落检测信号作用;2组接触传感器杆(左、右前方各1组),触发微动开关,给出碰撞检测信号:

将机芯抬起:

可以看见接触传感器杆下还有1组红外发射、接收LED,这个高度的前半圆弧共分布4组红外发射、接收LED,起检测前方较大障碍物、避免碰撞的作用:



卸下机器底板上的10颗固定螺丝:

将机器上下分开:

机器下半部是产生真空吸尘的风机、积尘盒室:
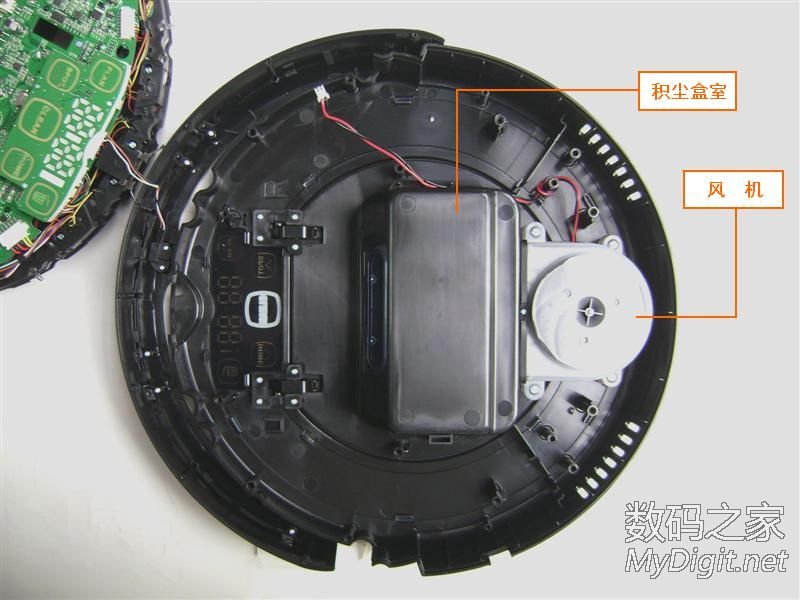

机器上半部的结构:

左滚轮盒及位置检测微动开关(当滚轮悬空时,微动开关断开,机器立即停止工作):


右滚轮盒及位置检测微动开关:

圆形绿色物件是动圈式小喇叭,机器语音用:


主机电路板:

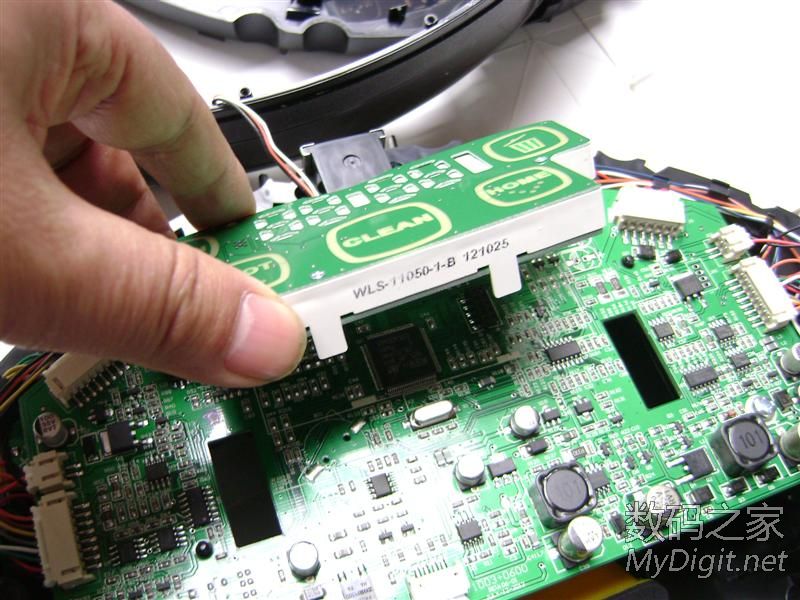
LED热感触控屏(即电容触控屏)是密封的整体组件,用接插口与主板连接的,将其拔下:
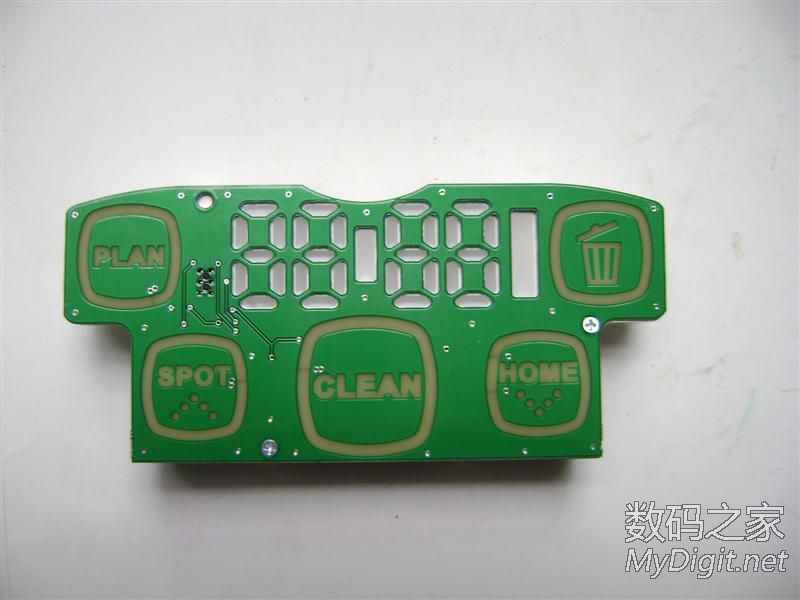
取下的LED热感触控屏组件:
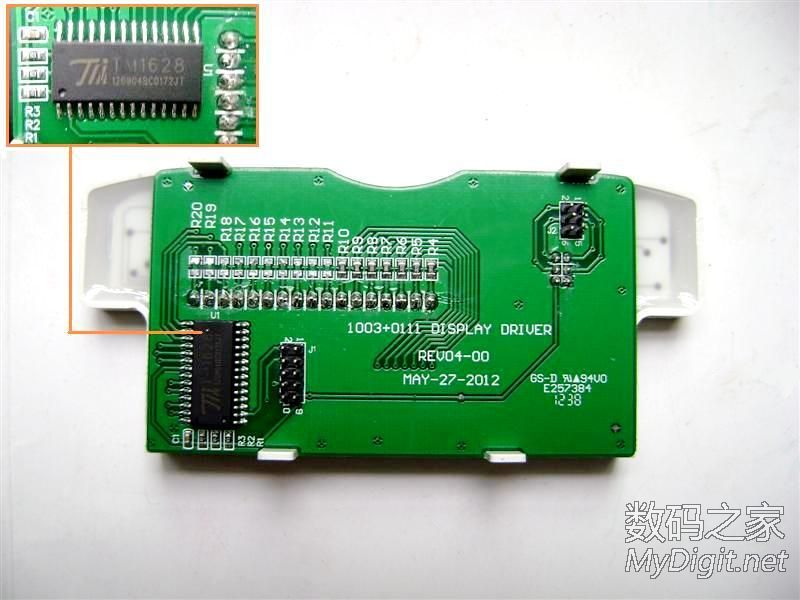
LED热感触控屏组件背面,TM1628是带键盘扫描接口的LED显示器驱动控制专用电路,内部集成有MCU数字接口、数据锁存器、LED高压驱动、键盘扫描等电路。主要应用于VCR、VCD、DVD 及家庭影院等产品的显示屏驱动:
拔下热感应触控屏后的主电路板:


主控系统MCU使用ARM单片机STM32F103 VBT:


主电路板左侧的主要IC:
仙童公司FDS8958A双MOSFET,驱动左清扫刷电机
74HC02D是四2输入或非门:
LM293是低功耗低失调电压双比较器:
D882型功率三极管(3A 10W)用于驱动左滚轮电机:

主电路板右侧的主要IC,与左侧对称,有FDS8958A,74HC02D,LM293,D882,驱动右边的清扫刷电机及滚轮电机:

电路板不同角度:



WTV040-20SS是一次性编程(OTP)语音芯片,机器的提示语音储存其中:

IR公司的场效应管FR024N(ID=17A,45W),驱动风机:

IR公司的场效应管FR9024N 最大漏极电流5.5A,最大耗散功率38W,作DC-DC变换器的电源管:

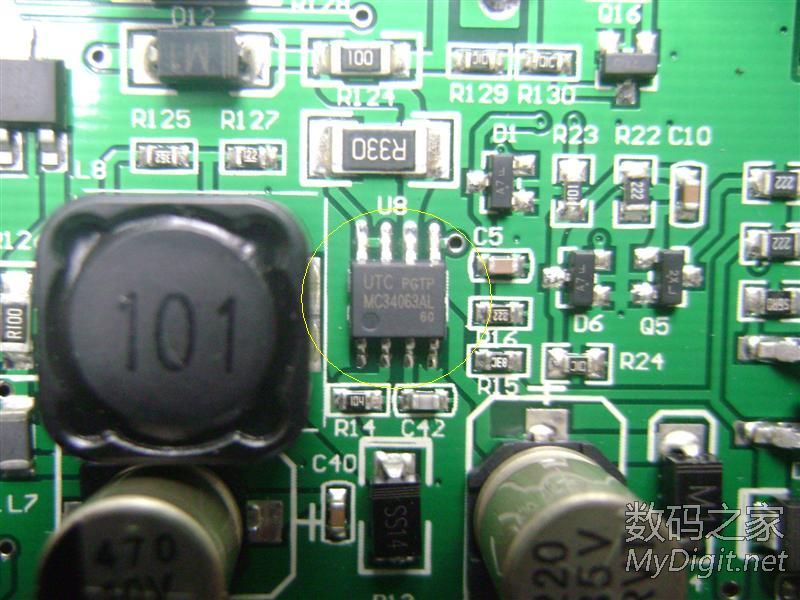
MC34063AL是一种单片双极型线性集成电路,专用于DC-DC变换器控制部分,片内包含有温度补偿带隙基准源、一个占空比周期控制振荡器驱动器和大电流输出开关,能输出1.5A的开关电流。它能使用最少的外接元件构成开关式升压变换器、降压式变换器和电源反向器。这里作变换直流1.8V,为CPU提供电源。
AMS1117 3.3是输出3.3伏的低压差线性稳压器IC,为系统I/O口提供3.3伏电源:

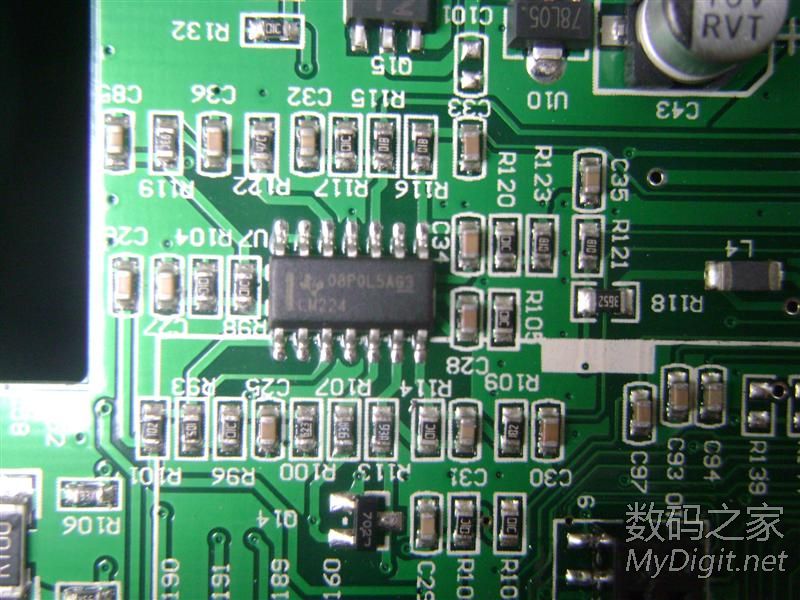
LM224是工业级的四运放IC:
卸下主板固定螺丝,看看PCB背面:


下面是左滚轮驱动电机、左清扫刷驱动电机:

滚轮驱动电机的转速由MCU控制,当灰尘收集口的光电感应器发出灰尘较多信号,其转速会加快(自动变频);同时为了实现遍历无障碍的区域,以滚轮电机轴上的光电编码器计数开始和结束作为判断依据,给MCU提供中断控制信号,MCU按程序控制机器人在绕开障碍物以后,回到原来的行进路线上去:

下面是右滚轮驱动电机、右清扫刷驱动电机,与左侧的完全相同:

 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

