
硬件平台:Digilent
ZedBoard
开发环境:Windows
XP 32 bit + Wmare 8.0 + Ubuntu 10.04 + arm-linux-xilinx-gnueabi
Zedboard linux: Digilent OOB Design
一、获取Zedboard可运行的linux
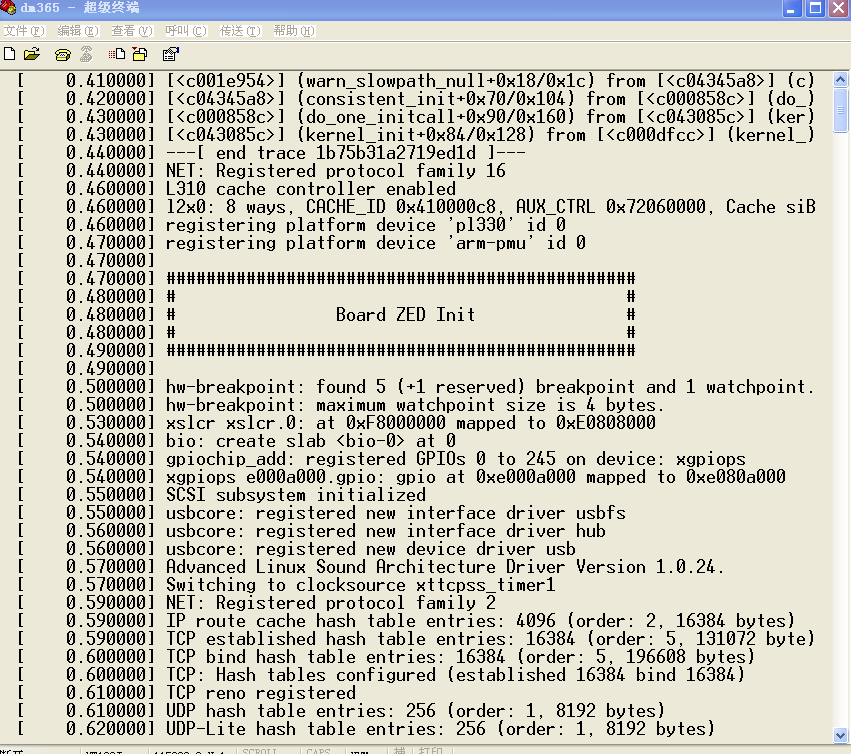
Digilent官网给出Zedboard的可运行linux设计ZedBoard_OOB_Design包,可从http://www.digilentinc.com/Data/Documents/Other/ZedBoard_OOB_Design.zip获取,下载后解压,将SD卡格式化为Fat32,把sd_image目录文件拷贝到SD卡根目录下;然后将JP7~JP11设置为SD卡启动模式,将JP2短路,JP3断开,这样可以下一步我们可以把U盘作为USB 从设备挂载到Zedboard上。上电后,等待ARM PS的配置、FPGA的配置(蓝色LED DONE 亮起),之后开始引导Linux系统了。可以从超级终端上看到一系列的引导信息:
二.下载交叉编译器
在ubuntu里下载arm-2010.09-62-arm-xilinxa9-linux-gnueabi.bin安装文件,网址:https://sourcery.mentor.com/GNUToolchain/kbentry62,放到<myPath>/tools/中
三安装交叉编译器
cd /<myPath>/tools/
chmod 755
arm-2010.09-62-arm-xilinxa9-linux-gnueabi.bin
./
arm-2010.09-62-arm-xilinxa9-linux-gnueabi.bin
然后出现了安装界面,选择安装的文件夹等等,可以自己设,嫌麻烦就一路回车或者“yes”就行了。不过要记住安装的目录,这个一会儿编译的时候要用到….
四 设置交叉编译环境
官网http://wiki.xilinx.com/zynq-tools 上说下载ia32-libs的库,
apt-get install ia32-libs
但是我的电脑因为之前配置过android的编译环境,已经安装了,直接设置就可以了:
exportCROSS_COMPILE=arm-xilinxa9-linux-gnueabi-
export
PATH=/<myPath>/CodeSourcery/Sourcery_G++_Lite/bin:$PATH
五 编写测试代码
#include
<stdio.h>
int main(void)
{
printf("Hello,ZedBoard!\n");
return 0;
}
编译:>arm-xilinx-linux-gnueabi-gcc
-o hello_world hello_world.c,
将得到的a.out文件放入到U盘的zedboard文件夹中,并插到USB OTG上,命令行下将其挂载到mnt下,并运行hello_world,具体如下:zynq> mount /dev/sda1 /mnt/,(sda1为U盘设备)
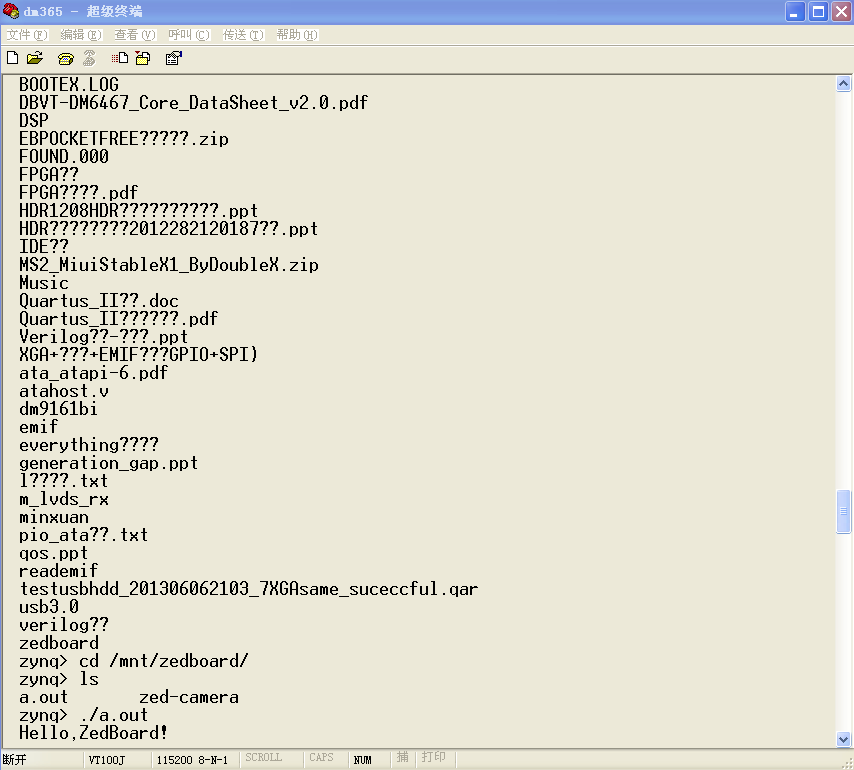
 很具体哇~~
很具体哇~~  我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

