
摘要:本设计以TI公司的超低功耗MCUMSP430处理器为核心设计并制作一个可以 寻迹的简易坦克车,该智能循迹坦克车能沿预定轨迹快速行进的同时能够确定附近光源位置并以光电方式打靶,以考核小车在水平面上跟踪轨迹的精确性、在水平面上打靶的精确性以及完成任务的速度来评判设计完成指标。通过运用感光元件(如光敏电阻,光敏二极管,红外接收管等)的特性、光线的物理性质(直线传播)、单片机MSP430的强大功能及部分外围电路设计,步进电机控制、算法构思来探寻光源定位的方法,以实现路径检测和光源的精确定位。本文着重讨论电机控制与光源检测定位方法。
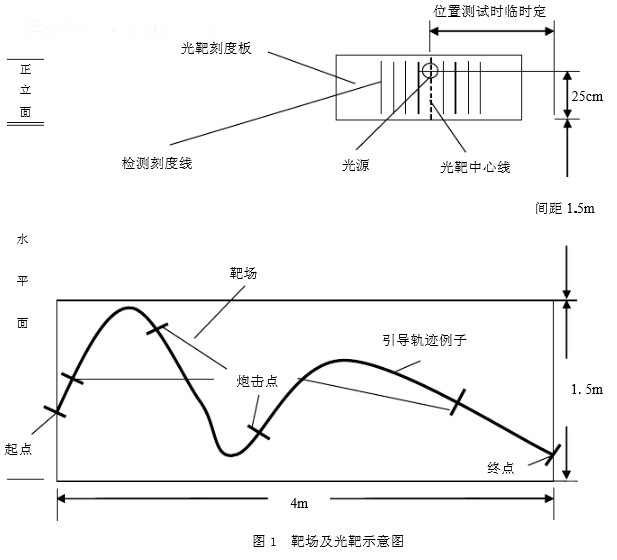
一、引言 本设计应达到的技术要求 设计并制作一个可以寻迹的简易坦克车,并在其上安装由电动机驱动的可以自由旋转的炮塔,在炮塔上安装激光笔以代替火炮。控制坦克沿靶场中预先设置的轨迹,快速寻迹行进,并同时以光电方式瞄准光靶,实现激光打靶。 本设计考核在水平面上跟踪轨迹的精确性、在水平面上打靶的精确性以及完成任务的速度。靶场如图1所示:
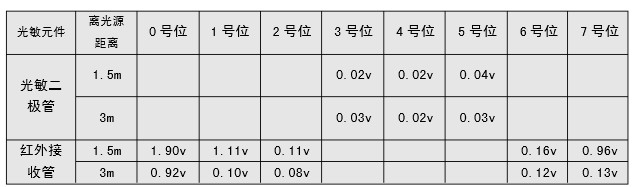
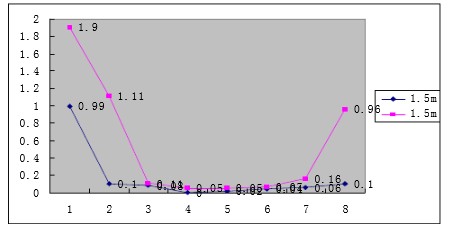
二、系统方案选择与论证 1、各种方案设想及论证、优缺点 (1)光敏电阻,光敏二极管,红外接收管对光敏感性特性对比。 通过对常见半导体光敏元件的试验,包括对光源的敏感度,电压变化曲线,检测距离,受外界光线干扰度等方面进行测试比较,如下表1:

通过对上述器件的同等条件测试下,得到如上表所示规律。由于赛道条件,最近距离1.5m,最远处有3m,小汽车灯泡作为光源,发出的光线中有比较多的红外线成分,利用光敏二极管的较宽检测范围,红外接收管较强的方向性和抗干扰能力,选择光敏二极管和红外接收管两者优点相结合的方式是最佳选择。
(2)光源检测方案一:直流电机带动炮塔 如下流程图2所示,两固定在旋转炮塔上不同位置的光敏二极管将感应的不同电压送入比较器,比较电压以实际情况调取,比较器所得逻辑高低电平送入驱动电桥(全H桥)驱动信号端,H桥输出随二极管感应电压的高低变化来控制直流电机正、反转,从而达到动态调节,直至炮塔瞄准器(激光管)直线对准光源中心位置。
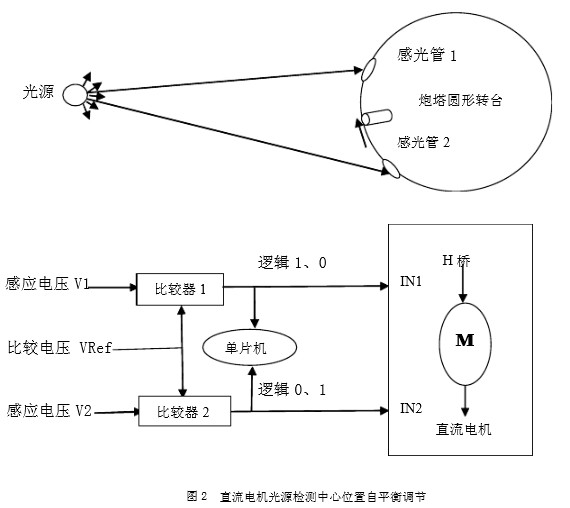
此方案中由光敏元件需要选取检测范围较大的光敏二极管,光线从侧面照射到感光面时亦有较高的感应电压,前方检测距离也不错。 通过试验电路,结果表明,利用直流电机驱动炮塔的光源检测方案有诸多优点:单片机端口资源利用少,无需多路AD口采集数据,只提取两路AD信号;电机控制方法简单,无需程序设定旋转方向等,硬件自动实现光源精确定位;控制精确,微量的入射光线量都会引起电机旋转,调节到中心位置。 但该方案也有许多不足之处,直流电机不易受单片机控制,旋转角度无法程序有效控制,对于固定角度旋转比较困难;只用两路传感器使得检测范围有局限,当光源从背后入射时检测很困难;无法通过软件方式使炮塔炮击后准确复位。
(3)光源检测方案二:步进电机带动炮塔,精确控制旋转角度 如下图3所示:
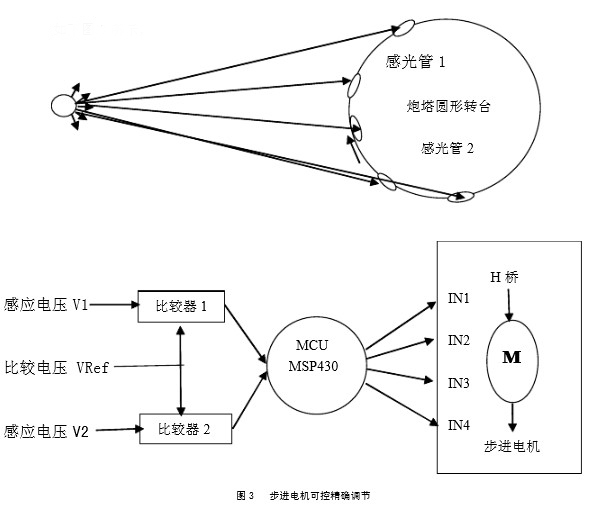
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 将电路处理后的信号送入单片机,经过单片机逻辑时序控制步进电机准确旋转 一定角度,使得炮塔旋转方位准确可控,更方便软件复位,反馈控制电机角度偏差,形成闭环控制,通过实验可知,当利用其他多路AD信号采集处理,将光源大致方位 H桥 IN1IN2IN3 IN4 步进电机 比较器1 感光管1 炮塔圆形转台感光管2 M 比较器2 MCUMSP430 成都信息工程学院刘海瑞、向志力、朱柏强、指导老师:杨明欣 2010年TI杯四川省大学生电子设计竞赛智能坦克车 第8页共17页、 确定后,利用另外两路相近传感器进行微调(具体设计见本文七创新设计点), 使得光源定位精确,稳定,可靠。
(4)传感器布局研究 根据光线沿直线传播的性质和小汽车灯泡光源光谱分析,试验了几种传感器布局方案,如表2: 表2几种传感器布局方案比较(试验)
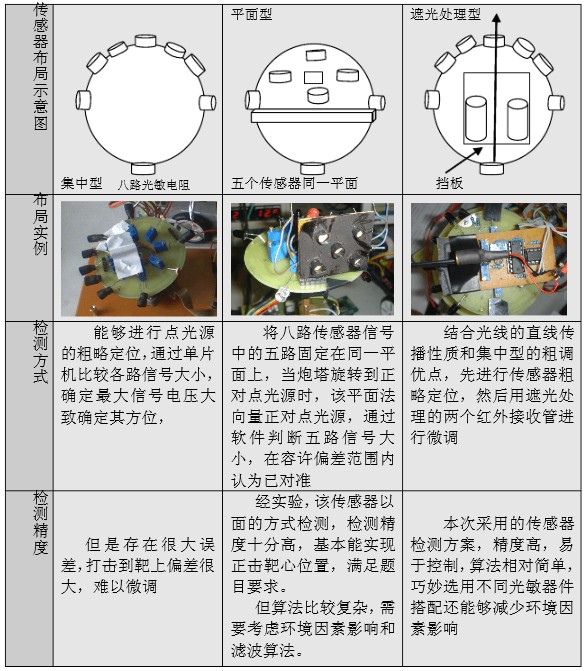
(5)外界环境干扰及其消除光敏电阻和光敏二极管极易受外界环境光线影 响,白天和晚上测试效果差异很大,为此专门在传感器周围加上热缩管作为遮光套管,长短合适饿遮光管能有效地抑制环境光的干扰。2、方案确定 基于以上方案的优缺点比较,本设计采用MSP430对步进电机进行控制方案,带动炮塔,实行光源的精确定位。传感器布局和制作采用遮光处理型(见上表2)(具体设计详见 七设计创新)。 3、方案论证、 以上几种方案和布局的实验和探讨验证,步进电机结合遮光处理型传感器布局,能够实现坦克车炮击快速,精确定位,达到题目设计要求,切实可行。
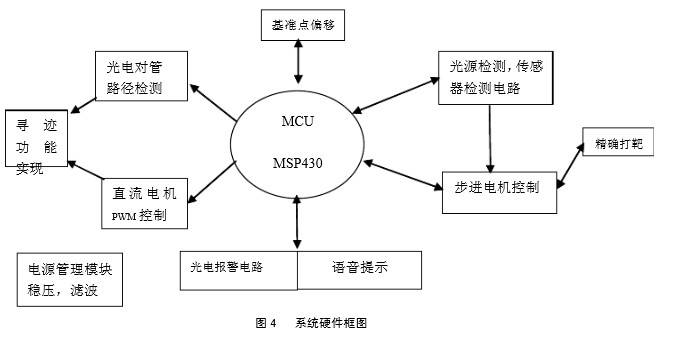
三、系统总体设计 1、系统总体硬件电路框图(如下图4)
2、系统软件结构设计框图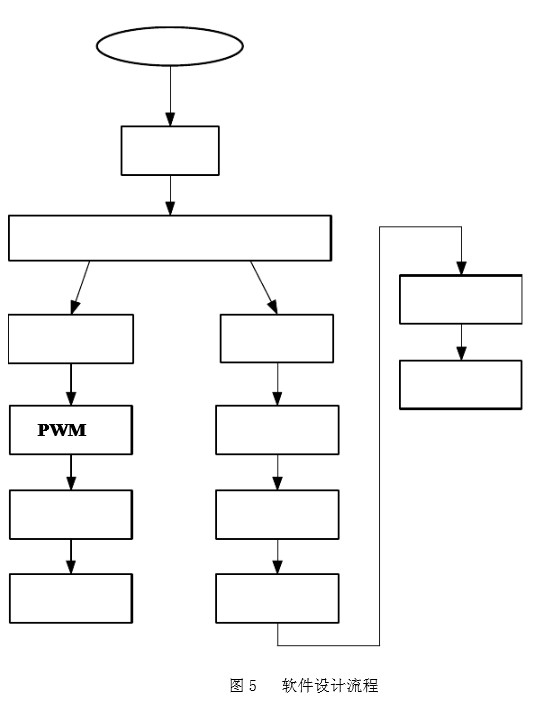
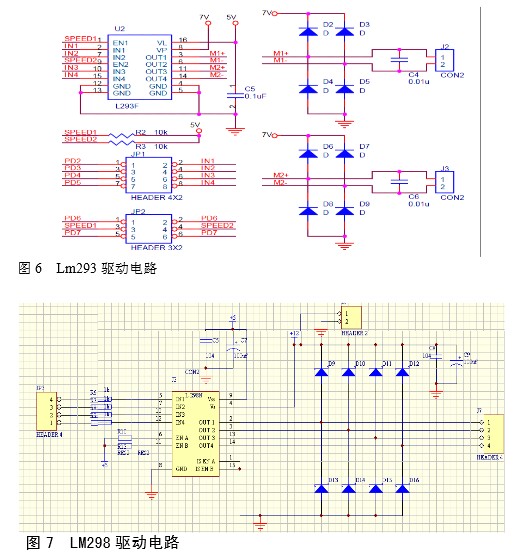
四、系统单元电路设计 1、系统供电电源设计 电源电压经稳压芯片Lm7805和Lm1117-3.3分别稳压到5V和3.3v后提供给系统各个单元电路模块供电。2、直流电机驱动电路,步进电机控制电路 直流电机采用LM293驱动电路控制,如下图6:步进电机采用Lm298、驱动电路如下图7所示。
五、系统整体测试,理论分析与参数计算
1、光敏二极管,红外接收管不同距离时的采样电压
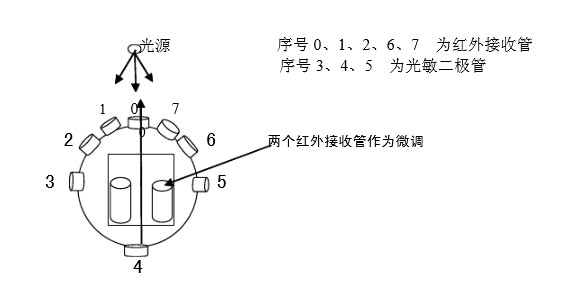
表3、光源功率14.5w,光敏二极管,红外接收管采集信号电压
8、红外接收管方向性很强,变化很明显。
2、坦克车性能参数 坦克车采用新颖传感器布局搭配和检测方案,打靶精度很高,反应迅速,达到了题目要求
表4 打靶精度

六、部分设计亮点及调试难点解决方案 1、硬件电路设计创意 (1)、巧妙运用加法器电路获得比较器参考电压,使得光敏元件自适应环境变化
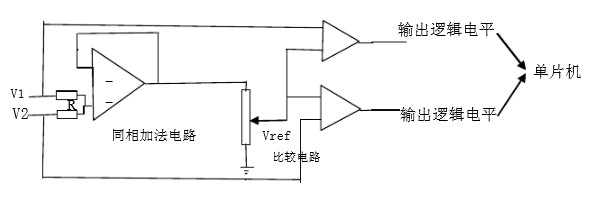
传感器在不同环境和不同距离是感应出来的值有很大差异,当用外接比较器比较信号电压时,需要给定参考电压VRef,常用方法是用精密滑动变阻器调节到一个固 R — — 成都信息工程学院刘海瑞、向志力、朱柏强、指导老师:杨明欣 2010年TI杯四川省大学生电子设计竞赛智能坦克车第14页共17页、 定的参考电压值,以便比较器输出电压为单片机易于采集的逻辑电平直接送入IO口。 如上图9所示,若采用加法器电路,将两路需要平衡的比较电压V1,V2送入加法器相加后将所得电压(V1+V2)/2 降压处理(以便后级两路比较器可以同时输出高 电平,并据此判断打靶正中靶心),所得电压作为参考电压。通过这种模拟电路运 算后的比较电路适应性高,应对不同环境光线影响,参考电源随时自我调整,适应性 强,打靶精度相当高。 (2)、利用光的特性(直线性)设计检测方法,进行位置精确定位 光的直线传播是光线最重要的一种物理性质,利用这种性质,设计了独特的光源定位微调装置,如下图10,11所示:
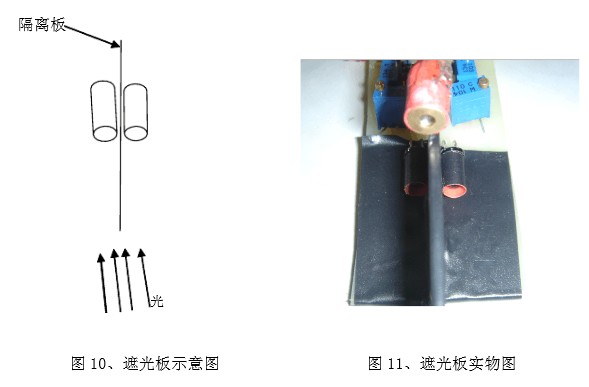
入射光线处于两红外对管的前方时,当激光炮偏离靶心时,遮光挡板相应偏离靶心,两红外对管由于遮光板遮挡了部分光线而产生不同的信号电压,进而输入比较电路比较输出,因而微小的偏移就会引起炮塔的自动调整,十分灵活,更为精确。
(3)、语音提示系统
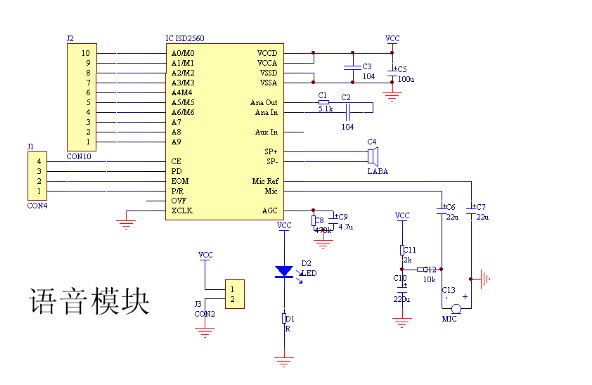
图9、自适应参考电压
设计中加入了基于ISD2560语音芯片的语音录放系统,对小车在行驶过程中的部分操作如启动,停车,打靶,越警戒线报警等实现语音实时播报,基本实现了430单片机控制微电脑语音系统。测试效果良好。 2、软件算法构思精髓 (1)、解决步进电机在光源精确定位中左右振荡和过调的问题 在遮光型的微调装置设计中,如果微小偏移发生,单片机处理后的信号送至步进电机进行角度校正,但在调试过程中实际情况和理论分析出入很大,步进电动机产生振荡和失步现象,它影响应用系统的正常运行,因此要尽力去避免,振荡现象主要发生于: 步进电动机工作在低频区(电机转至中心位置附近进行微调);
步进电动机工作在共振区; 步进电动机突然停车时(题目基本要求中要求暂停然后打靶)。 为消除微调振荡,本次设计对步进电机进行了变频调节,采用变频变压调节。步进电机在高频和在低频时转子所获得的能量不一样。在低频时,绕组中的电流上升时间长,转子获得的能量大,因此容易产生振荡,在高频时则相反。所以,设计电路单片机变频处理后,频率的降低而减小,这样使绕组在低频时的电流减小,可以有效地消除振荡。 七、结论及设计感想 综上所述,在光源定位的过程中,运用好光敏器件的特性和布局因素以及在算法上实现精确定位起了决定性作用,可以达到预期要求。
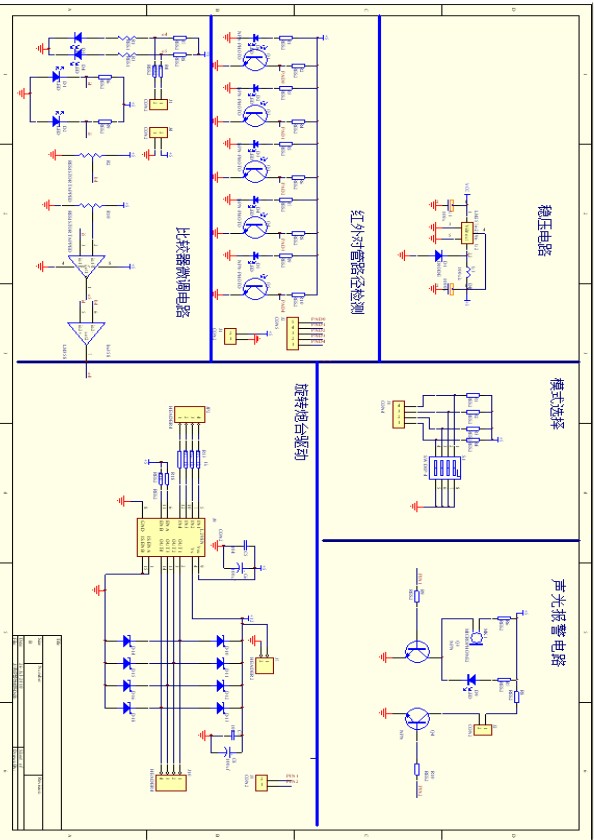
八、附录 1、整体电路图
九、参考文献
【1】沈建华等.MSP430系列16位超低功耗单片机实践与系统设计.清华大学出版社。2004
【2】 华成英 模拟电子技术基础(第四版)高等教育出版社。2006.
【3】Texas InstrumentsIncorporated.Msp430xlxx Family User's Guide,http//www.msp430.com.2003
附录1:整体电路图设计
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

