
关于AVR中断:
系统在正常运行主程序时,如果突然有一个重要的任务要马上处理,那么系统就要保存现在的工作,然后再去处理这个任务,执行这个重要任务完毕以后再返回原来的主程序继续运行,这就是中断。
主程序一旦进入中断服务程序,那么AVR芯片将自动的关闭全局中断,在这个期间不再执行其它的中断请求,直到中断程序结束以后芯片才自动的重新开放全局中断。(注意,在这个期间某些中断请求可能会被丢弃,某些请求会留下中断请求标致,一旦当前的中断执行完毕,这个有中断标致的请求就有可能马上得到响应,如INT0的下降沿触发就会留下中断请求标致,而低电平触发就不会流下中断请求标致)。如果你想在执行中断服务程序时响应另外一个更重要的中断,那么就要在中断服务程序中加入一条打开全局中断的语句。
使用ICC快速建立中断服务程序 程序文件
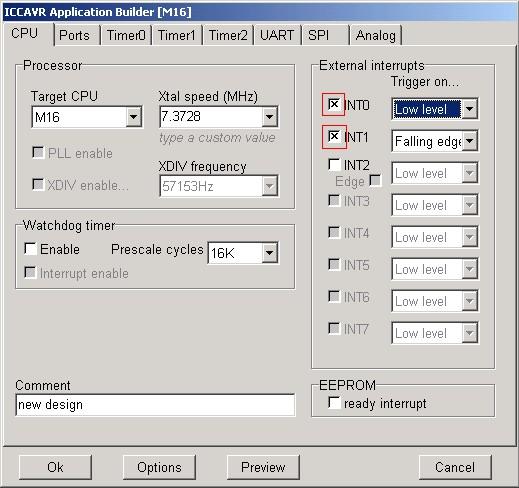
使用ICCAVR Application Builder进行如下图所示的设置。 可以设置是否使用中断,上升延,下降延,低电平,任意的逻辑电平变化。
将生成的程序进行修改,DDRA = 0x01;PORTD = 0x0C; ,添加MAIN函数,如下
//ICC-AVR application builder : 2006-12-8 17:04:44
// Target : M16
// Crystal: 7.3728Mhz
#include
#include
unsigned int i=0;
void port_init(void)
{
PORTA = 0x00;
DDRA = 0x01;
PORTB = 0x00;
DDRB = 0x00;
PORTC = 0x00; //m103 output only
DDRC = 0x00;
PORTD = 0x0C; //使INT0,INT1对应口上拉电阻有效
DDRD = 0x00; //必须设置INT0,INT1对应口为输入
}
#pragma interrupt_handler int0_isr:2
void int0_isr(void)
{
//external interupt on INT0
i++; //在中断里进行操作
}
#pragma interrupt_handler int1_isr:3
void int1_isr(void)
{
//external interupt on INT1
PORTA = 0x01; //在中断里进行操作
}
//call this routine to initialize all peripherals
void init_devices(void)
{
//stop errant interrupts until set up
CLI(); //disable all interrupts
port_init();
MCUCR = 0x08; //INT1 的下降沿产生异步中断请求,INT0上升延
GICR = 0xC0; //INT0和INT1使能
TIMSK = 0x00; //timer interrupt sources
SEI(); //re-enable interrupts
//all peripherals are now initialized
}
void main(void)
{
init_devices();
while(1) //死循环等待中断
;
}
相关解释
#pragma interrupt_handler int0_isr:2
中断的约定表示方法:int0_isr有一个与之对应的应用程序void int0_isr(void),2为中断向量,值越小,优先级越高,INT0的优先级仅次于复位。
MCU 控制寄存器- MCUCR MCU 控制寄存器包含中断触发控制位与通用MCU 功能
通用中断控制寄存器- GICR 使能或禁用外部中断请求
使用过程中:为了降低干扰,中断引脚请加上一个4.7K的上拉电阻,还可以根据实际需要,加上电容滤波,防抖动。
【更多资源】
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

