
本文是以时钟芯片DS1302为例子来分析时序图并写出代码。DS1302是采用SPI三线接口与单片机进行同步通信。重点分析单字节读时序,单字节写时序,寄存器读时序,寄存器写时序,并完成4个函数。完整代码以及仿真图下载地址:http://pan.baidu.com/s/1ntM5Kgh
本文引用地址:http://www.eepw.com.cn/article/214986.htm

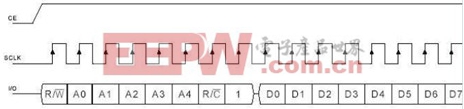
上图为寄存器读时序,为什么先贴出这个图呢,因为读寄存器包含了单字节的写以及单字节的读。从图上可以看出,读DS1302的寄存器是先写入一个地址,然后再去读一个字节。那么就可以根据这个图来完成单字节的读写时序分析以及代码的编写。
单字节写时序
图1可以告诉我们,在时钟的上升沿是写入数据,是从低位开始写入。还有一个需要注意的地方是写字节和读字节连接处,从图中可以看出,当最后一个位写入后,接下来的一个下降沿就开始读数据了,在代码编写时要注意这一点,不然读数据就会出错。先看看下面的代码:
void dsWriteByte(u8 dat) //写入字节
{
u8 i;
for(i = 0;i < 8;i++)
{
if(dat & 0x01) ds1302IOStatu(1);
else ds1302IOStatu(0); //低位先写入,根据要写入的数据确定IO的电平
ds1302CLKStatu(0);
ds1302CLKStatu(1); //产生上升沿写入数据
dat >>= 1; //移位,准备下一位
}
} //写一个字节后,此时时钟脚是高电平
单字节读时序
同样是根据图1可以看出是下降沿读取数据,低位先被读取。根据这个信息编写如下代码:
u8 dsReadByte() //读一个字节
{
u8 i,tmp = 0;
for(i = 0;i < 8;i++)
{
ds1302CLKStatu(1);
tmp >>= 1; //移位
ds1302CLKStatu(0); //产生下降沿
if(ds1302_IO) tmp |= 0x80; //读取一位数据
}
return tmp; //返回数据
}
寄存器读时序
上面完成了单字节读写函数,根据图1来完成读寄存器的代码。这时就的控制RST脚了。由时序图可以看出,写一个字节和读一个字节时,RST脚都是高电平状态,那么根据这些信息就完成如下代码:
u8 dsReadReg(u8 addr) //读寄存器
{
u8 tmp;
ds1302RSTStatu(1); //拉高RST脚之后再完成写字节和读字节
dsWriteByte(addr); //写地址
tmp = dsReadByte(); //读字节
ds1302RSTStatu(0); //最后拉低RST脚,和图1的时序相同
tmp = (tmp >> 4) * 10 + (tmp & 0x0f); //这个是数据类型转换
return tmp; //返回数据
}
寄存器写时序
上图为寄存器写时序,拉高RST脚后,写入地址再写入数据最后拉低RST脚,这样就完成了写寄存器操作。完成以下的代码:
void dsWriteReg(u8 addr,u8 dat) //写寄存器
{
ds1302RSTStatu(1); //拉高RST脚
dsWriteByte(addr); //写入地址
dsWriteByte(dat); //写入数据
ds1302RSTStatu(0); //拉低RST脚
}
四个时序到此就分析结束了,再回头看看编写的代码都是依据时序得来的,学会分析时序图就可以写出属于自己的代码了,同样可以依据时序图来检查代码的错误。了解了这部分的时序分析,推荐大家利用模拟SPI的通信方式编写xpt2046的读写函数。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

