
作者:太原理工大学 柴庆龙 潘俊 马亚丽
指导教师:谢刚 闫高伟
作品简介
第一章 引 言
随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。智能车技术依托于智能控制,前景广阔且发展迅速。目前,掌握着汽车工业关键技术的发达国家已经开发了许多智能车的实验平台和商品化的车辆辅助驾驶系统。有研究认为智能汽车作为一种全新的汽车概念和汽车产品,在不久的将来会成为汽车生产和汽车市场的主流产品。
教育部为了加强大学生实践、创新能力和团队精神的培养,经研究决定,委托教育部高等学校自动化教学指导分委会主办每年一度的全国大学生智能汽车竞赛,并成立了由教育部、自动化分教指委、清华大学、飞思卡尔半导体公司等单位领导及专家组成的“飞思卡尔”杯全国大学生智能汽车竞赛。该竞赛是为了提高大学生的动手能力和创新能力而举办的,具有重大的现实意义。与其它大赛不同的是,这个大赛的综合性很强,是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感、电子、电气、计算机和机械等多个学科交叉的科技创意性比赛,这对进一步深化高等工程教育改革,培养本新意识,培养硕士生从事科学、技术研究能力,培养博士生知识、技术创新能力具有重要意义。
智能车比赛是搭载组委会提高的标准汽车模型上的,采用飞思卡尔半导体公司的8 位、16 位、32 位指定类型的微控制器为核心控制模块,通过指定种类的路径检测传感器,设计供电电路、驱动电路及编写相应的控制程序,装配出一辆能够自主识别道路的汽车模型,并且能够按照道路,以最快时间跑完整个道路者获胜。
该项比赛现在主要分为摄像头,光电,电磁三大类,并且已经成功举行了六届,比赛的规模也在不断的扩大,比赛的成绩也在逐年提高。不断挑战着参赛队伍的团队合作能力,动手能力和耐压能力。
第二章 系统整体设计
2.1系统概述
本系统是以MC9S12XS128 为核心,需要设计最小系统板,电源模块和电机驱动电路。需要通过摄像头读取赛道信息,通过黑白跳变的思路提取赛道引导黑线,并根据提取到的引导线特征对舵机转向和电机速度进行控制。通过使用编码器测速,构成闭环PID 控制。为了提高调试效率,使用了上位机。通过单片机发送需要观察的数据给上位机,提高调试效率。整体框架如图 2.1 所示。
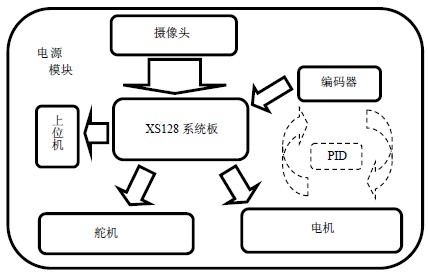
图 2.1 系统总体框架图
全文请访问:摄像头组 太原理工大学_晋速二队(摄像头).pdf。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

