
作者:常熟理工学院 李栋 金福彪 蒋亚楠
指导教师:李鑫 戴梅
作品简介
摘要
本文设计的智能车系统以MC56F8366微控制器为核心控制单元,基于CCD摄像头的图像采样获取赛道图像信息,提取赛道中心线,计算出小车与黑线间的位置偏差,采用PD方式对舵机转向进行反馈控制。使用PID控制算法调节驱动电机的转速,结合特定算法分析出前方赛道信息实现对模型车运动速度的闭环控制。为了提高模型车的速度和稳定性,我们用C++开发了仿真平台、蓝牙串口模块、SD卡模块、键盘液晶模块等调试工具,通过一系列的调试,证明该系统设计方案是确实可行的。
第1章 引言
在半导体技术日渐发展的今天,电子技术在汽车中的应用越来广泛,汽车智能化已成为行业发展的必然趋势。汽车智能化被认为是汽车技术发展进程中的一次革命,汽车智能化的程度被看作是衡量现代汽车水平的重要标志,是用来开发新车型,改进汽车性能最重要的技术措施。有研究认为智能汽车作为一种全新的汽车概念和汽车产品,在不久的将来会成为汽车生产和汽车市场的主流产品。 在该技术报告中,我们详细介绍了智能车系统的软硬件结构、设计开发过程及我们的创新。具体表现在电路的创新设计,以及算法方面的独特想法,而对车辆行驶状况的调试我们还开发了仿真平台。在整个过程,培养了我们对电路的设计、软件的编程、系统的调试等个方面的能力,锻炼了我们知识融合、实践动手,创新的能力,对与我们今后的学习工作都有着积极的影响。
第2章 系统总体设计
2.1 系统分析
该系统以 Freescale16位单片机MC56F8366作为系统控制处理器, 采用基于的摄像头的图像采样模块获取赛道图像信息,以PD方式对舵机转向进行反馈控制,电机转速控制采用 PID控制,通过 PWM 控制驱动电路调整电机的功率,通过特定算法分析出前方的路况,并根据路况的不同为小车选取最优路径在最短的时间内到达终点。
智能车系统主要包括以下模块:DSC最小系统、转向舵机模块、电机驱动模块、编码器、视频信号处理模块、电源管理模块、仿真及调试平台。
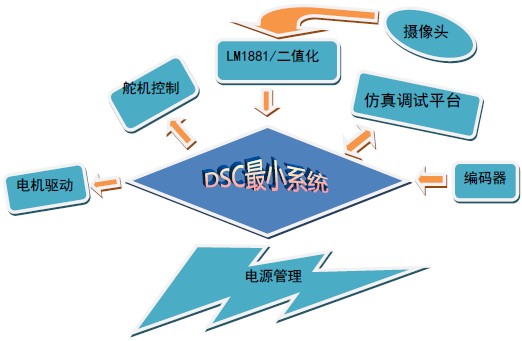
图1.1 整体结构框图
全文请访问:摄像头组-常熟理工学院-闪电六队-技术报告.pdf。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

