
作者:大连工业大学 田绍伟 李 凯 于伟建
指导教师:李宝营 祁建广
作品简介
摘要
智能车系统以MC9S12XS128微控制器为核心,通过CCD摄像头检测跑道的路况,用编码器检测模型车的速度。使用PID控制算法调节驱动电机的转速和舵机的角度,完成对模型车运动速度和运动方向的闭环控制。
第一章 引言
全国大学生智能汽车竞赛是受教育部高等教育司委托,由教育部高等学校自动化专业教学指导分委员会主办,旨在加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革。该竞赛是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技创意性比赛。在本次比赛中,本组使用大赛组委会统一提供的竞赛车模全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8 位、16 位微控制器作为核心控制模块,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,最终实现一套能够自主识别路线,并且可以实时输出车体状态的智能车控制系统。
本次第七届“飞思卡尔”杯智能汽车竞赛与以往六届相比有了很大改变,首先在规则上摄像头组和光电组由原来寻跑道中间的单根黑线改为道路两侧的黑线,电磁组虽然还寻方波信号线,但是车模由原来四轮着地跑改为两轮着地直立行走,实现了由“猿到人”变化。本文对摄像头组车模机械结构调整、传感器电路、电机驱动电路、核心控制算法等进行了详细的说明。
1.2 总体方案介绍
根据摄像头循迹的要求,摄像头车设计包括赛车的设计和恒流源的设计。赛车共包括五大模块:摄像头传感器模块、速度传感器、MC9S12XS128模块,电机驱动模块、电源管管理模块。总体方案框图如图1.1 所示。
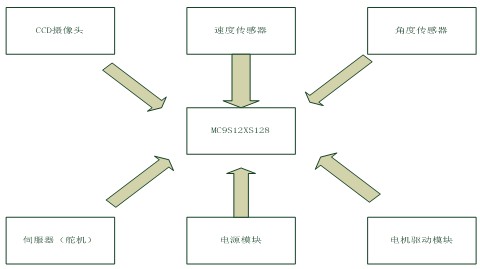
图1.1 总体方案框图
各个模块的作用如下所示:
1. CCD摄像头模块:在该模块中对采集到的赛道信息进行处理,并通TLC5510和LM1881进行二值化处理,将处理得到的信息传给单片机,以是单片机能预知路况,通过算法处理,去合适的的控制伺服器转动的角度和电机的转速。
2. 速度传感器:选择光电编码器,采集当前的电机速度,作为系统速度控制的反馈。同时与设置的目标速度作比较,选择合适的算法使其变化为目标速度,从而实现电机的加速减速。
3.角度传感器:使用角度传感器,采集当前跑道与地面的角度,判断当前位置是否为坡道,将信息反馈给单片机,使其选择合适的算法,更好的平稳的过坡道。
4. MC9S12XS128模块:S12 单片机是系统的核心部分。它负责接收赛道信息数据、赛车速度等反馈信息,并对这些信息进行恰当的处理,形成合适的控制量来对伺服器与电机驱动进行控制,以控制小车的运行速度和方向。
5. 电机驱动模块:在该模块中使用了两片BTS7960桥式电路驱动电机,当接收到单片机的命令后便执行相应的操作,同时信息采集模块又采集到电机的状态信息,反馈给单片机。从而整个系统构能够形成一个闭环系统,保证了小车的平稳运行。
6. 电源管管理模块:为了使各模块正常工作,必须供给各自所需的电压,例如电机电源,舵机电源,单片机工作电源。在恒压源的基础上,搭建模拟电路,使恒压源分别变为目标电压。
在此只对各模块的功能做简单的阐述,后面章节将会为各模块进行详细的讲解
全文请访问:摄像头组-大连工业大学-开拓者技术报告.doc。
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

