
作者:北京科技大学天津学院 袁玮 张晓龙 赵钰
指导教师:罗富臣
作品简介
摘要
随着智能交通系统(ITS)的研究在各国越来越被重视,智能车的控制技术也成为一项新兴技术,教育部决定举办基于高速发展的智能车技术为背景的“飞思卡尔杯”全国大学生智能车大赛。
本设计以第五届飞思卡尔杯全国智能车大赛为背景,以Matiz仿真车模为平台,搭建了一个以飞思卡尔半导体公司生产的16位微控制器MC9S12XS128为控制核心的智能车控制系统。该系统综合了传感器技术,自动控制技术,信号处理技术,单片机技术,使车模能够以最合适的速度自主循线,在碰到传感器盲点时能主动找正,实时判断车体是否处正常状态并及时修正。
系统以飞思卡尔公司的16位微控制器MC9S12XS128作为核心处理器,对电感传感器采集的信号进行放大,从而对赛道进行识别,极大地提高了模型车的抗干扰性与前瞻性。采用PID算法稳定电机转速,使车具有更强的稳定性与瞬时提速性能。在智能车的调试过程中,使用上位机利用无线通信技术对智能车的状态进行实时监视,有效提高了调试的效率。
本系统显示了高度的智能化、人性化,并且具备良好的安全性、稳定性,可以为无人驾驶汽车的后续研究提供经验。
引言
智能运输系统作为未来交通发展趋势之一,为解决城市交通拥挤和堵塞问题提供了有效途径。从八十年代以来,美国、日本、欧洲等发达国家和地区竞相投入巨额资金和大量人力,开始大规模的进行交通运输智能化的研究,取得了许多重要成果。而作为智能车——路系统(Intelligent Vehicle—Highway Systems,简称IVHS)的重要一部份,智能车在世界各国的研究也随着计算机技术、网络技术、通讯技术的飞速发展而不断深入。
本文以第五届“飞思卡尔”杯全国大学生智能汽车竞赛为背景,对智能车控制系统进行了深入的讨论,以作者参与制作的智能模型车为例简要介绍了智能模型车的设计制作全过程,主要涉及到机械电子、传感器技术、驱动控制技术、自动控制、人工智能等多个领域的研究及技术融合。本系统虽然只是一个模型,但具有充份的科学性,实用性和先进性,对真实智能车控制系统所遇到的问题,都有所研究。
本文分为五章,第一章为系统的总体方案的介绍,之后将会分为三个部份:机械结构部份,硬件电路设计,软件算法分析设计来详细的介绍智能车的各个模块及在调试过程遇到的问题及解决方法。第五章简要的介绍了调试与仿真环境。
1系统总体方案设计及车模各项参数
本章主要简要的介绍智能车的总体设计思路与各个模块的分配,在后面的章节中将分为机械结构部份,硬件电路设部份,软件算法分析部份对智能车做再更一步的简介,各模块将会在分别在各章节中详细论述。
1.1系统总体框图
如图所示,车模的系统框图及各模块关系如图所示:
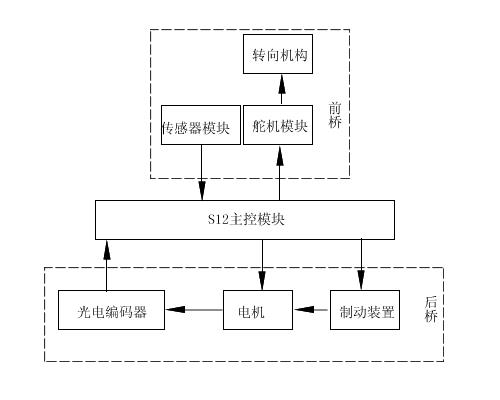
图1.1 车模的系统框图
智能车系统由车前桥的电磁传感器模块,舵机模块,转向机构,后桥的光电编码器,电机,制动装置,以及MC9S12XS128主控模块构成。前桥模块负责路径检测以及转向工作,后桥模块负责电机速度控制,MC9S12XS128主控模块负责赛道数据处理以及控制策略的实施。此外,还增加了键盘作为输入输出设备,用于智能车的角度和方位控制
全文请访问:北京科技大学天津学院电磁组.doc
 我要赚赏金
我要赚赏金 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂

